背景
二维卷积
在二维卷积中,我们通过卷积核对输入图像进行卷积来计算输出图像。卷积核是一个小尺寸的矩阵,例如3×3、5×5或5×7像素;这个矩阵中的项称为卷积系数。
在二维相关中,我们通过将输入图像与相关掩码相关联来计算输出图像。相关掩码是一个小矩阵,其条目称为相关系数。
如下例所示,二维卷积和二维相关非常密切。具有卷积核h的图像的二维卷积与具有相关掩模m的图像的二维相关是相同的,
m通过将h旋转180°来获得,考虑输入图像f和卷积核h,如下所示:
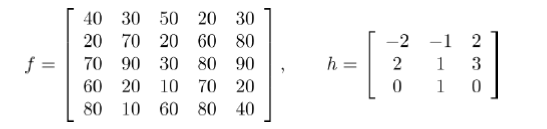
我们将计算由f和h的二维卷积产生的输出图像g。在本实验室中,假设输出图像被裁剪成与输入图像相同的大小。
要计算目标像素位置的卷积输出,例如行y=2,列x=3,请执行以下步骤。
第一步:将卷积核h旋转180度,得到m。

这里,m是对应于给定卷积核的相关掩码。
第二步:在输入图像上滑动m,使其中心与目标位置重合(y行=2,列x=3)。
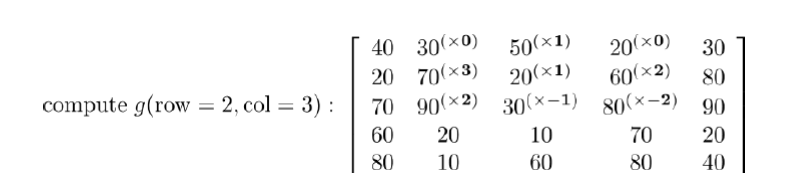
第三步:将m和它下面的输入像素相乘,用同样的方法求和所有的乘积

我们可以计算出整个输出图像

如果我们对f和相关掩码m进行二维相关,则得到相同的输出图像。对于相关,只需要步骤2和步骤3
MATLAB中的二维卷积
a)MATLAB函数imfilter可用于执行二维卷积和二维相关。
要计算图像f和卷积核h的二维卷积,请使用g=imfilter(f,h,'conv')
计算图像f和相关掩码m的二维相关性,使用 g=imfilter(f,m,'corr')
注意第三个参数中的差异。
在MATLAB中,利用rot90函数,从卷积核中得到相关掩模m:m=rot90(h,2);
b) 对于方程(5.1)中给出的输入矩阵f和卷积核h,为以下任务输入适当的MATLAB命令。
计算f和h之间的二维卷积的输出。
计算相关掩模m。
计算f与m之间二维相关性的输出。
比较二维卷积和二维相关性。
5.4线性图像滤波的应用
在本节中,我们将研究线性图像滤波的几种应用。这些应用包括平滑图像、锐化图像和检测图像中的边缘。
图像平滑
a)平滑滤波器(也称为低通滤波器)用于去除图像中的噪声。平滑滤波器的卷积核通常满足两个条件:(i)所有系数为正;(ii)所有系数之和等于1。
平滑滤波器在去除由随机噪声引起的突变图像时非常有用。但是,它们也会模糊图像,并且模糊在包含边缘的区域中最明显。
两种常见的平滑滤波器是平均滤波器和高斯低通滤波器。
平均滤波器:卷积核的所有系数都相同: M是卷积核的大小。
M是卷积核的大小。
高斯低通滤波器:该滤波器基于高斯函数,其定义为,
 ,其中ux,u为中心,σ为标准差。
,其中ux,u为中心,σ为标准差。
为了确保所有系数和为1: 
这些滤波器的卷积核可以用MATLAB函数fspecial生成。例如,
h=fspecial('average',5)%平均滤波器,大小为5×5,
h=fspecial('gaussian',5,0.5)%高斯滤波器,大小为5×5,σ=0.5
b) 考虑图像Lena gaussian-noise.bmp包含高斯噪声。我们的目标是通过线性滤波去除图像中的噪声。
计算平均滤波器产生的输出图像。对不同尺寸(5×5和7×7)的过滤器进行试验,并对结果进行比较。
计算尺寸为5×5的高斯滤波器产生的输出图像。用不同的标准差值(σ=0.5和σ=1)进行试验。描述参数σ对滤波器输出的影响。
图像锐化
a)在摄影和出版行业中,一种用于锐化图像的标准技术被称为“反锐化掩模”。之所以有这个名字,是因为这种技术找到了使其“取消锐化”的图像组件,然后从原始图像中删除(或“屏蔽”)该组件。
图像的“未锐化”部分通过低通滤波得到,然后从原始图像中减去,得到边缘图像。最后将边缘图像加入到原始图像中,使边缘更加清晰。所有这些步骤都可以通过具有以下卷积核的单个滤波器来完成

在MATLAB中,可以使用函数fspecial创建一个反锐化掩蔽滤波器:h_unsharp=fspecial('unsharp',0.2)上述命令创建一个带系数0.2的反锐化滤波器。
应用反锐化掩模滤波器锐化图像Lena-blur.bmp. 对的一系列值进行试验,以找到最合适的值。
边缘检测
a)有几种线性滤波器可用于检测图像中的边缘(见ECTE903-tearch-02.pdf)。在这个实验中,我们将实验两种滤波器:Prewitt算子和Sobel算子。“Operator”只是卷积内核或过滤器的另一个名称。
Prewitt算子:有八种不同的Prewitt算子;每个算子都被设计成检测具有特定方向的边缘。例如,运算符P1检测水平边缘;运算符P8检测垂直边缘;运算符P2检测对角线边缘:

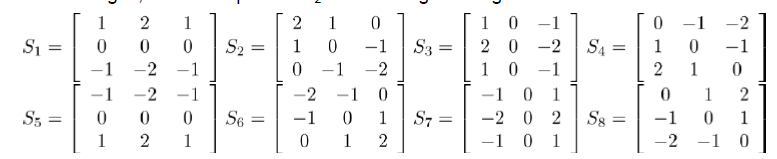
Sobel算子:有八种不同的Sobel算子;每个算子都被设计成沿着特定方向检测边缘。例如,运算符S1检测水平边缘;运算符S8检测垂直边缘;而运算符S2检测对角线边缘:
b) 执行MATLAB命令open(sldemo_msfcn_edge_detect.slx'以查看边缘检测的演示。单击“开始模拟”按钮。
c) 清单5.1中的MATLAB程序detect_edge.m实现了通过线性滤波找到图像边缘的步骤。此程序在图像上应用两个Prewitt运算符P1和P3shape.bmp.
% Written: Lam Phung, July 2006
f = rgb2gray(imread('shapes.bmp')); % Read input image
figure(1), subplot(2,2,1),imshow(f); title('Input image');
f = double(f);
%% Linear image filtering
hx = [1 1 1; 0 0 0; -1 -1 -1] % Prewitt horizontal operator
hy = [1 0 -1; 1 0 -1; 1 0 -1] % Prewitt vertical operator
edge_x = imfilter(f,hx,'conv'); % Edge strength along x direction
edge_y = imfilter(f,hy,'conv'); % Edge strength along y direction
%% Show edge detection based on individual operator
% Consider a pixel as an edge pixel if edge strength exceeds a threshold
edge_threshold = 1;
subplot(2,2,3); imshow(abs(edge_x) > edge_threshold); title('Horizontal operator');
subplot(2,2,4); imshow(abs(edge_y) > edge_threshold); title('Vertical operator');
%% Combining both horizontal and vertical filter outputs
edge_magnitude = sqrt(edge_x .^ 2 + edge_y .^ 2); % Combined edge strength
edge_threshold = 1;
edge_map = (edge_magnitude >= edge_threshold);
subplot(2,2,2), imshow(edge_map), title('Edges based on both operators');
%% Show edge directions
[H, W] = size(f); [x,y] = meshgrid(1:W,1:H);
figure(2), quiver(x, y, edge_x, edge_y);
axis image; axis ij;
非线性图像滤波使用顺序统计
a)中值滤波器的非线性滤波器。对于线性滤波器,输出像素是相邻像素的线性组合。相反,对于中值滤波器,输出像素是相邻像素的中值。对于两个过滤器,邻域由过滤器大小决定,例如3×3或5×5像素。
考虑图1中的示例。假设对图像f应用大小为3×3的中值滤波器。第2行和第3列的输出像素为:

b) MATLAB有一个内置函数medfilt2用于图像中值滤波。它的语法是g=medfilt2(f,[mn]),其中f是输入图像,g是输出图像,过滤器大小是m行×n列。
c) 图为Lena-salt-pepper-noise.bmp在这个实验室里被盐和胡椒的噪音污染了。应用中值滤波器从该图像中去除噪声。比较不同滤波器尺寸产生的输出。
d) 使用适当的高斯低通滤波器去除图像中的噪声-噪声.bmp. 比较高斯滤波器和中值滤波器产生的输出。
e) 清单5.2显示了一个MATLAB程序,该程序使用5×5像素的过滤器大小生成中值滤波图像。此程序使用函数中值来计算列向量的中值。
要使用median_filter.m程序,请尝试f=imread('Lena-salt-pepper-noise.bmp');median_filter(f);
function g = median_filter(f)
[height, width]= size(f); % Size of input image
g = zeros(height, width); % Allocate memory for output image
for y = 1:height
for x = 1:width
x1 = x - 2; % left column of the 5x5 window
x2 = x + 2; % right column of the 5x5 window
y1 = y - 2; % top row of the 5x5 window
y2 = y + 2; % bottom row of the 5x5 window
% When the neighbourhood exceeds the image boundary
x1 = max(x1, 1);
x2 = min(x2, width);
y1 = max(y1, 1);
y2 = min(y2, height);
window = f(y1:y2, x1:x2); % 5 x 5 window
window = window(:); % rearrange window into a column vector
g(y, x) = median(window); % output pixel = median of window
end
end
g = uint8(g); imshow(g); % convert to 8-bit image and display
E1。licence-plate.bmp是一个用于车牌自动识别的示例图像。然而,图像质量较低。应用本实验室所学的适当的图像增强技术来增强图像。在答案中包括MATLAB程序和输出图像
E2。实现中心加权中值滤波器中心加权中值(CWM)滤波器在ECTE903-TEARCH-02.pdf中描述。基于清单5.2,编写一个计算CWM过滤图像的MATLAB函数。函数应该有如下语法 function g = cw_median_filter(f, M)
代码见:404 (csdn.net)
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)