一. 传感器分类
在自动驾驶或者机器人领域,传感器的使用按照测量对象划分,可分为两大类,一类是测量自身状态,另一类测量环境状态。前者主要包含GPS,IMU和编码器;后者主要有激光雷达、毫米波雷达和相机。这里的状态主要是指位置和速度,有些传感器可以测量其他状态,例如相机可以实现物体的分类。本篇介绍GPS传感器,以及在ROS系统中如何表示GPS数据。
二. 作用
GPS传感器,全称Global Positioning System,源自美国军方,是现在使用比较广泛的四种全球定位系统之一,其他三种分别是欧盟的“伽利略”系统,俄罗斯的“格洛纳斯”系统,以及中国北斗卫星导航系统。
三. 系统组成
GPS与其他传感器有一个显著的不同点,其他传感器基本上是一个单独的硬件模块,而GPS是一个系统,其架构图如下
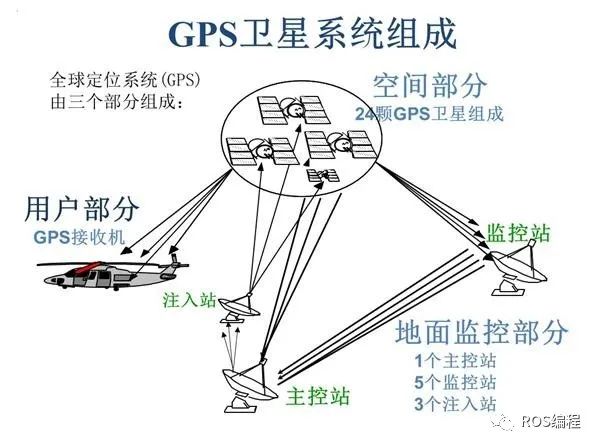
如图所示,GPS系统包含三个部分:空间部分,地面监控部分,用户部分。空间部分主要是卫星群,向用户部分发送位置、时间等信息;地面监控部分,监视控制空间部分;用户部分接受空间部分发送的信息,根据信息计算本身的三维位置、速度和时间等。日常生活中,我们常说的GPS、或者G