2020年博主有写过几篇关于PCL的博客,这边想先回顾下,再增加点新内容。之前写的博客专栏如下链接。
https://blog.csdn.net/jiugeshao/category_11993239.html?spm=1001.2014.3001.5482 https://blog.csdn.net/jiugeshao/category_11993239.html?spm=1001.2014.3001.5482
https://blog.csdn.net/jiugeshao/category_11993239.html?spm=1001.2014.3001.5482
一.PCL官网资料
之前多篇博客中都提过,要善于利用官方去学习一个新的东西,好的东西,其官网大多必然讲些详细。现在官网的一些资源都会放到github上,比如之前博主讲到的OpenVINO。
OpenVINO使用介绍(一)_竹叶青lvye的博客-CSDN博客_openvino
OpenVINO示例介绍_竹叶青lvye的博客-CSDN博客_openvino 示例
PLC的官网链接如下:
Point Cloud Library | The Point Cloud Library (PCL) is a standalone, large scale, open project for 2D/3D image and point cloud processing.
Docs入口是API的介绍文档,PCL里模块分的很清楚,若想直接看对应模块的API,也可以直接从点击大方对应图标进入。
Tutorials是详细的手册介绍,里面还会有一些示例,方便整体知道如何去使用,了解一些算子原理
github网址如下
GitHub - PointCloudLibrary/pcl: Point Cloud Library (PCL)
可看到最新的版本是1.12.1
tags可以下载到常用的平台下源码编译出来的安装文件,如果没有满足自己平台的,那么可以自己去编译下。(源码编译和交叉编译方法可以参考如下两篇博客),这里不再赘叙。
Ubuntu下源码编译OpenCV静态库及使用(勾选WITH_QT)_竹叶青lvye的博客-CSDN博客_opencv静态库使用
Ubuntu下交叉编译OpenCV(WITH_QT)_竹叶青lvye的博客-CSDN博客_opencv编译with_qt
二. PCL安装和配置
这一步主要可参考之前的博客:
vs2017配置PCL1.8.1 QT5.12.1(一)- 配置步骤_竹叶青lvye的博客-CSDN博客_vs2017配置pcl
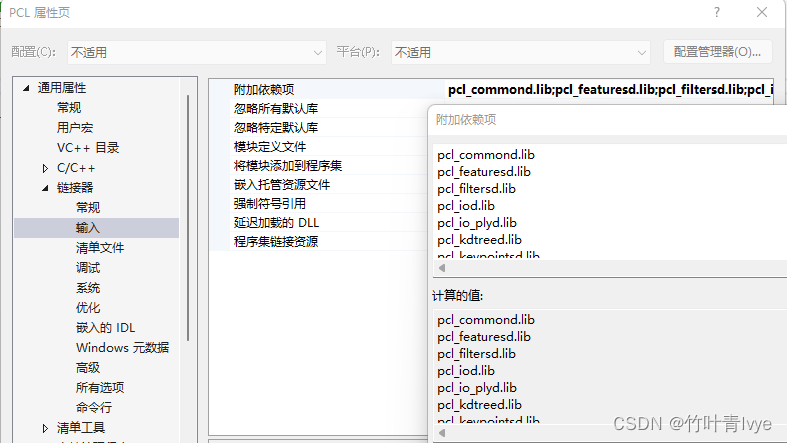
这里博主选择了新的版本,vs2019 + PCL1.12.1
这篇博客需要补充的地方是,中间在输入目标链接库名字时,可以用python脚本批量去获得lib库的名字。
脚本如下:
# author:"jiugeshao"
# data:2022/9/3 2:16
import os
def ListFilesToTxt(Currentdir, outfile, nameExtentisons, isIncludeSubDir, isDebug):
"""
:param Currentdir: 需要统计的目录
:param outfile: 需要输出到的txt文件
:param nameExtentisons: 后缀列表
:param isIncludeSubDir: 是否需要统计子目录
:return:
"""
exts = nameExtentisons.split(" ")
files = os.listdir(Currentdir)
for name in files:
fullname = os.path.join(Currentdir, name)
if (os.path.isdir(fullname) & isIncludeSubDir):
ListFilesToTxt(fullname, outfile, nameExtentisons, isIncludeSubDir, isDebug)
else:
for ext in exts:
if (name.endswith(ext)):
if(isDebug == True):
if("gd" in name or "d.lib" in name):
outfile.write(name + "\n")
break
else:
if("gd" not in name or "d.lib" in name):
outfile.write(name + "\n")
break
def Read(Currentdir, outfile, isDebug):
"""
:param Currentdir:需要统计的目录
:param outfile:需要输出到的txt文本
:return:
"""
nameExtensons = ".lib" #若要支持多种后缀统计,可以空格隔开,再加其它后缀名
file = open(outfile,"w")
if not file:
print("cannot open the fule %s" % outfile)
ListFilesToTxt(Currentdir, file, nameExtensons, 1, isDebug)
file.close()
dir = "C:\\Program Files\\PCL 1.12.1\\3rdParty"
debug_txt = "D:\\PCL\\debug_3rdparty.txt"
release_txt = "D:\\PCL\\release_3rdparty.txt"
Read(dir, debug_txt, isDebug=True)
Read(dir, release_txt, isDebug=False)
如上是去获取3rdParty目录及其子目录下满足条件设置的lib(debug版本和release版本也都做了区分)。生成的debug_3rdparty.txt和release_3rdparty.txt文本如下:

大家可在此脚本基础上做其它演变。
测试工程执行效果如下(工程也上传百度网盘):
链接:https://pan.baidu.com/s/1RFLs3zvOIVR3ao_wR0lVfA
提取码:u4l9
c++代码如下:
// test_vtk63.cpp : 定义控制台应用程序的入口点。
//
#include <stdio.h>
#include <tchar.h>
#include "vtkAutoInit.h"
//VTK_MODULE_INIT(vtkRenderingOpenGL2);
//VTK_MODULE_INIT(vtkInteractionStyle);
//#define vtkRenderingCore_AUTOINIT 2(vtkRenderingOpenGL2, vtkInteractionStyle)
#include <boost/thread/thread.hpp>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/io/io.h>
#include <pcl/io/pcd_io.h>//pcd 读写类相关的头文件。
#include <pcl/PCLPointCloud2.h>
#include <pcl/visualization/range_image_visualizer.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <iostream>
using namespace pcl;
using namespace pcl::io;
using namespace std;
int testpointcloudToPcd()
{
vtkObject::GlobalWarningDisplayOff();
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
char strfilepath[256] = "D:\\PCL\\rabbit.pcd";
//第一种读入方法较多场合如此
if (-1 == pcl::io::loadPCDFile(strfilepath, *cloud)) {
cout << "error input!" << endl;
return -1;
}
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("PointsCloud Recognition"));
viewer->addPointCloud(cloud, "model_cloud");
viewer->addCoordinateSystem(1.0);
viewer->initCameraParameters();
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
}
int _tmain(int argc, _TCHAR* argv[])
{
testpointcloudToPcd();
return 0;
}
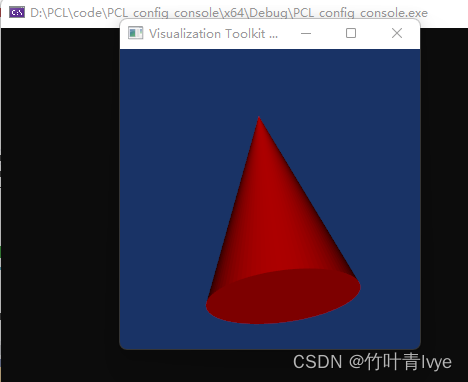
运行效果如下:
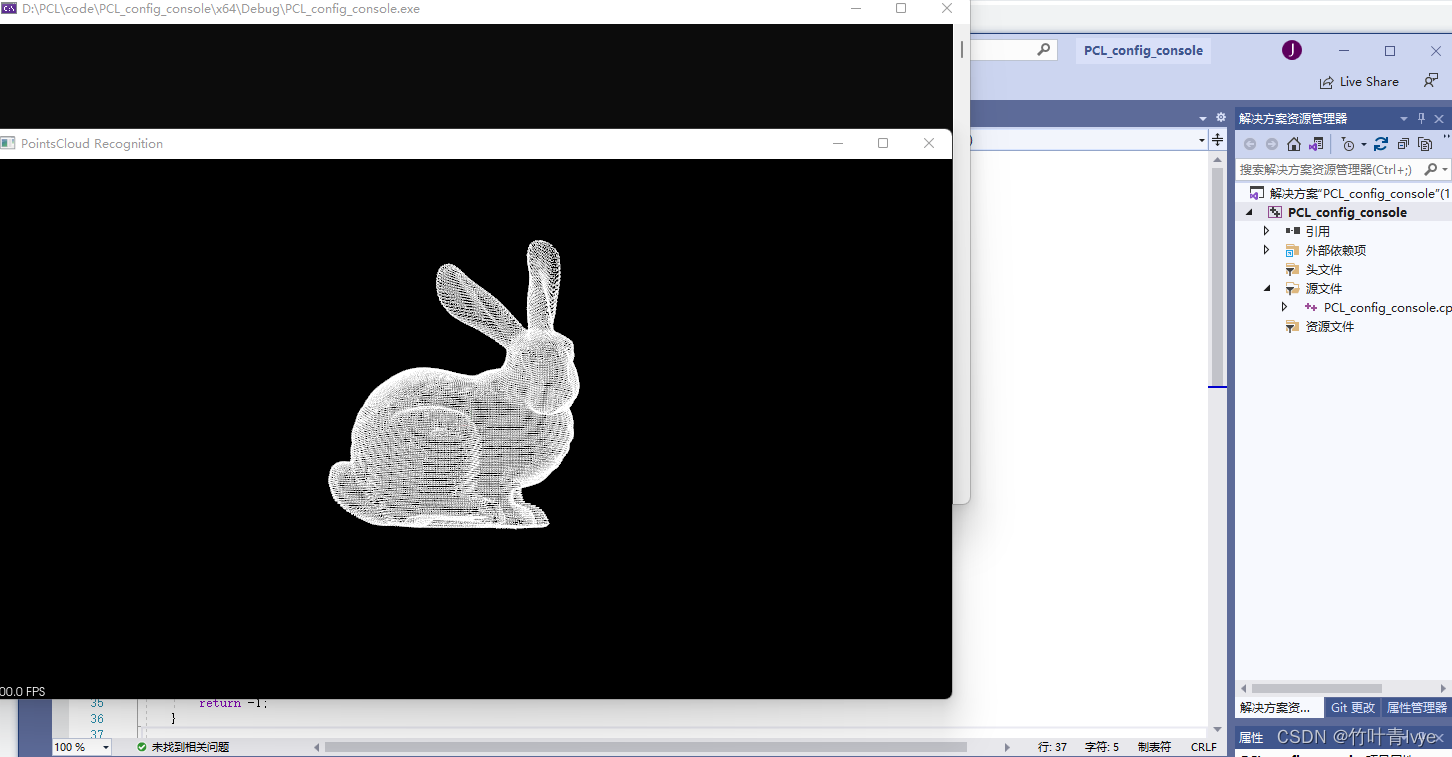
此版本对应的VTK版本是9.1
三.在VTK控件中显示PCL点云
1.直接用vtk去显示自定义的一个锥体
// test_vtk63.cpp : 定义控制台应用程序的入口点。
//
#include <map>
#include <tchar.h>
#include "vtkConeSource.h"
#include "vtkConeSource.h"
#include "vtkCommand.h"
#include "vtkCamera.h"
#include "vtkRenderWindowInteractor.h"
#include "vtkTransform.h"
#include "vtkInteractorStyleTrackballCamera.h"
#include <vtkSmartPointer.h>
#include <vtkDoubleArray.h>
#include <vtkCellArray.h>
#include <vtkPolyData.h>
#include <vtkDataSet.h>
#include <vtkLookupTable.h>
#include <vtkPointData.h>
#include <vtkPolyDataMapper.h>
#include <vtkActor.h>
#include <vtkProperty.h>
#include <vtkRenderer.h>
#include <vtkRenderWindow.h>
#include <vtkInteractorStyleTrackballCamera.h>
#include <vtkRenderWindowInteractor.h>
#include <vtkArcSource.h>
#include <vtkAppendPolyData.h>
#include <vtkScalarBarActor.h>
#include <vtkKdTree.h>
#include <vtkLODActor.h>
#include <vtkMath.h>
#include <vtkWindowToImageFilter.h>
#include <vtkBMPWriter.h>
#include <vtkAutoInit.h>
#include <iostream>
#include <windows.h>
#include <stdio.h>
#include <windef.h>
#include <vtkAutoInit.h>
VTK_MODULE_INIT(vtkRenderingOpenGL);
VTK_MODULE_INIT(vtkRenderingFreeType);
VTK_MODULE_INIT(vtkInteractionStyle);
void testvtk2()
{
//创建数据源:创建一个圆锥,并设置其参数:高度、底面半径和分辨率
vtkConeSource* cone = vtkConeSource::New();
cone->SetHeight(3.0);
cone->SetRadius(1.0);
cone->SetResolution(100);
//映射器:创建一个多边形映射器,用于把多边形数据映射为可以被计算机渲染的图元
vtkPolyDataMapper* coneMapper = vtkPolyDataMapper::New();
coneMapper->SetInputConnection(cone->GetOutputPort());
//创建一个Actor,并关联一个映射器,从而确定Actor的形状
vtkActor* coneActor = vtkActor::New();
coneActor->SetMapper(coneMapper);
//方法1:设置演员颜色
coneActor->GetProperty()->SetColor(1.0, 0.0, 0.0);//设置对象颜色为红色
//方法2:设置演员颜色
//vtkProperty* coneProperty = vtkProperty::New();//设置一个Property对象
//coneProperty->SetColor(1.0, 0.0, 0.0);
//coneActor->SetProperty(coneProperty);
//渲染器:创建一个渲染器,添加要渲染的演员
vtkRenderer* ren1 = vtkRenderer::New();
ren1->AddActor(coneActor);
ren1->SetBackground(0.1, 0.2, 0.4);
//渲染窗口:添加一个渲染窗口,供渲染器使用
vtkRenderWindow* renWin = vtkRenderWindow::New();
renWin->AddRenderer(ren1);
renWin->SetSize(300, 300);
//实例化一个交互对象
vtkRenderWindowInteractor* interactor = vtkRenderWindowInteractor::New();//交互对象加入renWin窗口中
interactor->SetRenderWindow(renWin);
renWin->Render();//绘制舞台上的东西
interactor->Initialize();//交互对象初始化
interactor->Start();//开始交互事件
//释放内存
cone->Delete();
coneActor->Delete();
coneMapper->Delete();
ren1->Delete();
renWin->Delete();
interactor->Delete();
}
int _tmain(int argc, _TCHAR* argv[])
{
testvtk2();
return 0;
}
运行出现如下报错:
严重性 代码 说明 项目 文件 行 禁止显示状态
错误 LNK2019 无法解析的外部符号 "void __cdecl vtkRenderingOpenGL_AutoInit_Construct(void)" (?vtkRenderingOpenGL_AutoInit_Construct@@YAXXZ),函数 "public: __cdecl `anonymous namespace'::vtkRenderingOpenGL_ModuleInit::vtkRenderingOpenGL_ModuleInit(void)" (??0vtkRenderingOpenGL_ModuleInit@?A0xfeadf992@@QEAA@XZ) 中引用了该符号 PCL_config_console D:\PCL\code\PCL_config_console\PCL_config_console\PCL_config_console.obj 1
将代码中的VTK_MODULE_INIT(vtkRenderingOpenGL)修改为VTK_MODULE_INIT(vtkRenderingOpenGL2),即可!
2.pcl读入点云,在vtk控件中显示
代码如下:
// test_vtk63.cpp : 定义控制台应用程序的入口点。
//
// test_mfc_showDlg.h: 头文件
//
#include <tchar.h>
#include "vtkAutoInit.h"
VTK_MODULE_INIT(vtkRenderingOpenGL2);
VTK_MODULE_INIT(vtkInteractionStyle);
#include <boost/thread/thread.hpp> //多线程
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/io/io.h>
#include <pcl/io/pcd_io.h>//pcd 读写类相关的头文件。
#include <pcl/io/ply_io.h>
#include <pcl/PCLPointCloud2.h>
#include <pcl/point_types.h> //PCL中支持的点类型头文件。
#include <pcl/common/common_headers.h>
#include <pcl/console/parse.h>
#include <pcl/point_types.h>
#include <pcl/range_image/range_image.h>
#include <pcl/visualization/range_image_visualizer.h>
#include <pcl/visualization/pcl_visualizer.h>
#include "vtkCommand.h"
#include "vtkRenderer.h"
#include "vtkCellPicker.h"
#include "vtkProperty.h"
#include "vtkPlaneSource.h"
#include "vtkMetaImageReader.h"
#include "vtkImagePlaneWidget.h"
#include "vtkPlaneSource.h"
#include "vtkPlane.h"
#include "vtkSmartPointer.h"
#include "vtkResliceCursorActor.h"
#include "vtkResliceCursorPolyDataAlgorithm.h"
#include "vtkResliceCursor.h"
#include "vtkResliceCursorWidget.h"
#include "vtkResliceCursorLineRepresentation.h"
#include "vtkResliceCursorThickLineRepresentation.h"
#include <vtkVertexGlyphFilter.h>
#include "vtkImageReader2Factory.h"
#include "vtkImageReader2.h"
using namespace pcl;
using namespace pcl::io;
using namespace std;
using pcl::visualization::PointCloudColorHandlerGenericField;
using pcl::visualization::PointCloudColorHandlerCustom;
void testvtk2()
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
char strfilepath[256] = "D:\\PCL\\rabbit.pcd";
std::cout << "start to read" << std::endl;
//第一种读入方法j较多场合如此
if (-1 == pcl::io::loadPCDFile(strfilepath, *cloud)) {
cout << "error input!" << endl;
}
cout << cloud->points.size() << endl;
vtkSmartPointer<vtkPoints> points = vtkSmartPointer<vtkPoints>::New();//key code
vtkIdType size = cloud->points.size();
int n = 0;
for (vtkIdType rowId = 0; rowId < size; rowId++)
{
auto dp = cloud->points.at(rowId);
if (dp.z == 0) {
continue;
}
points->InsertNextPoint(dp.x, dp.y, dp.z);//key code
n++;
}
vtkSmartPointer<vtkPolyData> polydata = vtkSmartPointer<vtkPolyData>::New();
polydata->SetPoints(points);
vtkSmartPointer<vtkVertexGlyphFilter> glyphFilter = vtkSmartPointer<vtkVertexGlyphFilter>::New();
glyphFilter->SetInputData(polydata);
glyphFilter->Update();
vtkPolyDataMapper* dataMapper = vtkPolyDataMapper::New();
dataMapper->SetInputConnection(glyphFilter->GetOutputPort());
vtkActor* coneActor = vtkActor::New();
coneActor->SetMapper(dataMapper);
coneActor->GetProperty()->SetColor(1.0, 0.0, 0.0);//设置对象颜色为红色
//方法2:设置演员颜色
//vtkProperty* coneProperty = vtkProperty::New();//设置一个Property对象
//coneProperty->SetColor(1.0, 0.0, 0.0);
//coneActor->SetProperty(coneProperty);
//渲染器:创建一个渲染器,添加要渲染的演员
vtkSmartPointer<vtkRenderer> m_Renderer;
vtkSmartPointer<vtkRenderWindow> m_RenderWindow;
m_Renderer = vtkSmartPointer<vtkRenderer>::New();
m_Renderer->AddActor(coneActor);
m_Renderer->SetBackground(0.1, 0.2, 0.4);
m_RenderWindow = vtkSmartPointer<vtkRenderWindow>::New();
m_RenderWindow->SetSize(500, 500);
m_RenderWindow->AddRenderer(m_Renderer);
vtkRenderWindowInteractor * interactor = vtkRenderWindowInteractor::New();//交互对象加入renWin窗口中
interactor->SetRenderWindow(m_RenderWindow);
m_RenderWindow->Render();//绘制舞台上的东西
interactor->Initialize();//交互对象初始化
interactor->Start();//开始交互事件
polydata->Delete();
glyphFilter->Delete();
dataMapper->Delete();
coneActor->Delete();
m_Renderer->Delete();
m_RenderWindow->Delete();
interactor->Delete();
//if (m_RenderWindow->GetInteractor() == NULL)
//{
// vtkSmartPointer<vtkRenderWindowInteractor> RenderWindowInteractor =
// vtkSmartPointer<vtkRenderWindowInteractor>::New();
// RenderWindowInteractor->SetRenderWindow(m_RenderWindow);
// RenderWindowInteractor->Initialize();
//}
}
int _tmain(int argc, _TCHAR* argv[])
{
testvtk2();
return 0;
}
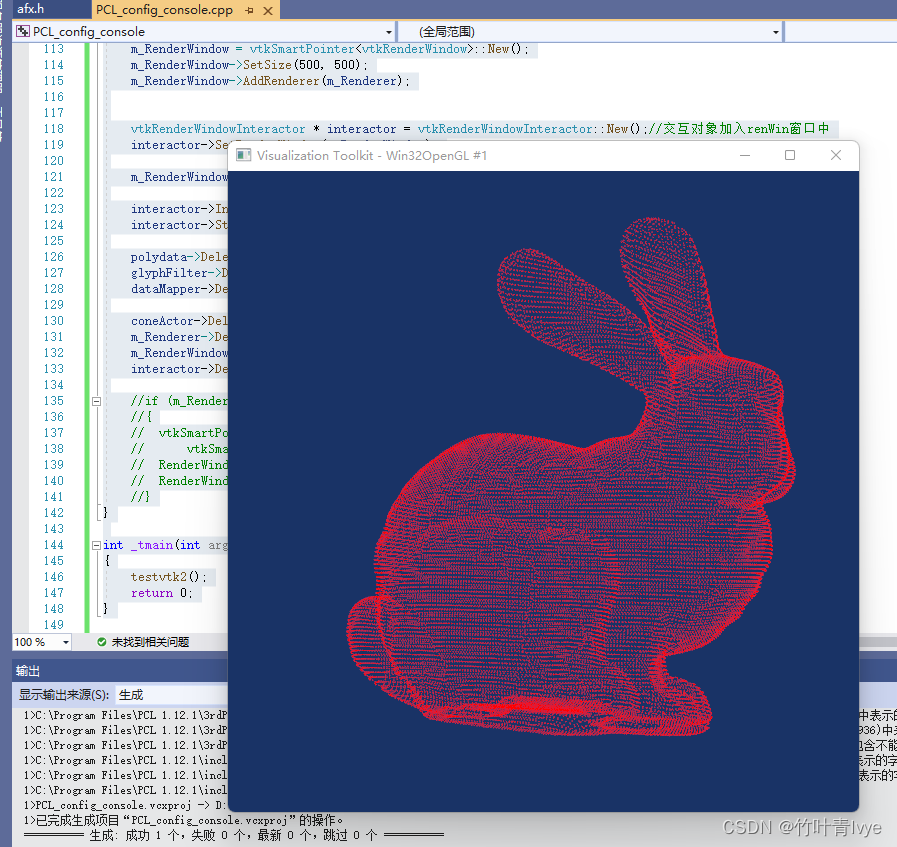
vtk中显示的效果如下:
3.VTK保存数据为vtk文件
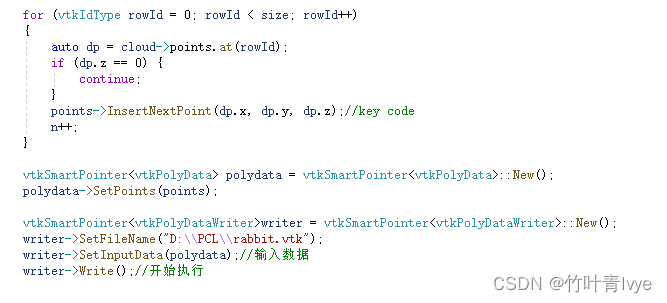
在上面代码的基础上,增加头文件#include <vtkPolyDataWriter.h>
在增加如下代码(polydata->SetPoints(points)语句下面),即可以保存数据到vtk文件中
4.VTK API读取本地vtk文件,并在自己控件里显示
代码如下:
// test_vtk63.cpp : 定义控制台应用程序的入口点。
//
// test_mfc_showDlg.h: 头文件
//
#include <tchar.h>
#include "vtkAutoInit.h"
VTK_MODULE_INIT(vtkRenderingOpenGL2);
VTK_MODULE_INIT(vtkInteractionStyle);
#include <boost/thread/thread.hpp> //多线程
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/io/io.h>
#include <pcl/io/pcd_io.h>//pcd 读写类相关的头文件。
#include <pcl/io/ply_io.h>
#include <pcl/PCLPointCloud2.h>
#include <pcl/point_types.h> //PCL中支持的点类型头文件。
#include <pcl/common/common_headers.h>
#include <pcl/console/parse.h>
#include <pcl/point_types.h>
#include <pcl/range_image/range_image.h>
#include <pcl/visualization/range_image_visualizer.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <vtkSimplePointsReader.h>
#include "vtkCommand.h"
#include "vtkRenderer.h"
#include "vtkCellPicker.h"
#include "vtkProperty.h"
#include "vtkPlaneSource.h"
#include "vtkMetaImageReader.h"
#include "vtkImagePlaneWidget.h"
#include "vtkPlaneSource.h"
#include "vtkPlane.h"
#include "vtkSimplePointsReader.h"
#include "vtkSmartPointer.h"
#include "vtkResliceCursorActor.h"
#include "vtkResliceCursorPolyDataAlgorithm.h"
#include "vtkResliceCursor.h"
#include "vtkResliceCursorWidget.h"
#include "vtkResliceCursorLineRepresentation.h"
#include "vtkResliceCursorThickLineRepresentation.h"
#include <vtkVertexGlyphFilter.h>
#include "vtkImageReader2Factory.h"
#include "vtkImageReader2.h"
#include <vtkPolyDataReader.h>
using namespace pcl;
using namespace pcl::io;
using namespace std;
using pcl::visualization::PointCloudColorHandlerGenericField;
using pcl::visualization::PointCloudColorHandlerCustom;
void testvtk2()
{
vtkNew<vtkPolyDataReader> reader;
reader->SetFileName("D:\\PCL\\rabbit.vtk");
reader->Update();
vtkSmartPointer<vtkPolyData> polydata = vtkSmartPointer<vtkPolyData>::New();
polydata->SetPoints(reader->GetOutput()->GetPoints());
vtkSmartPointer<vtkVertexGlyphFilter> glyphFilter = vtkSmartPointer<vtkVertexGlyphFilter>::New();
glyphFilter->SetInputData(polydata);
glyphFilter->Update();
vtkPolyDataMapper* dataMapper = vtkPolyDataMapper::New();
dataMapper->SetInputConnection(glyphFilter->GetOutputPort());
vtkActor* coneActor = vtkActor::New();
coneActor->SetMapper(dataMapper);
coneActor->GetProperty()->SetColor(1.0, 0.0, 0.0);//设置对象颜色为红色
//方法2:设置演员颜色
//vtkProperty* coneProperty = vtkProperty::New();//设置一个Property对象
//coneProperty->SetColor(1.0, 0.0, 0.0);
//coneActor->SetProperty(coneProperty);
//渲染器:创建一个渲染器,添加要渲染的演员
vtkSmartPointer<vtkRenderer> m_Renderer;
vtkSmartPointer<vtkRenderWindow> m_RenderWindow;
m_Renderer = vtkSmartPointer<vtkRenderer>::New();
m_Renderer->AddActor(coneActor);
m_Renderer->SetBackground(0.1, 0.2, 0.4);
m_RenderWindow = vtkSmartPointer<vtkRenderWindow>::New();
m_RenderWindow->SetSize(500, 500);
m_RenderWindow->AddRenderer(m_Renderer);
vtkRenderWindowInteractor* interactor = vtkRenderWindowInteractor::New();//交互对象加入renWin窗口中
interactor->SetRenderWindow(m_RenderWindow);
m_RenderWindow->Render();//绘制舞台上的东西
interactor->Initialize();//交互对象初始化
interactor->Start();//开始交互事件
polydata->Delete();
glyphFilter->Delete();
dataMapper->Delete();
coneActor->Delete();
m_Renderer->Delete();
m_RenderWindow->Delete();
interactor->Delete();
//if (m_RenderWindow->GetInteractor() == NULL)
//{
// vtkSmartPointer<vtkRenderWindowInteractor> RenderWindowInteractor =
// vtkSmartPointer<vtkRenderWindowInteractor>::New();
// RenderWindowInteractor->SetRenderWindow(m_RenderWindow);
// RenderWindowInteractor->Initialize();
//}
}
int _tmain(int argc, _TCHAR* argv[])
{
testvtk2();
return 0;
}
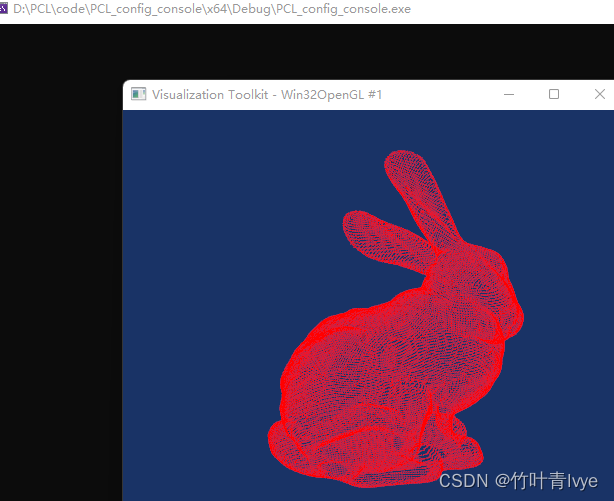
执行效果如下:
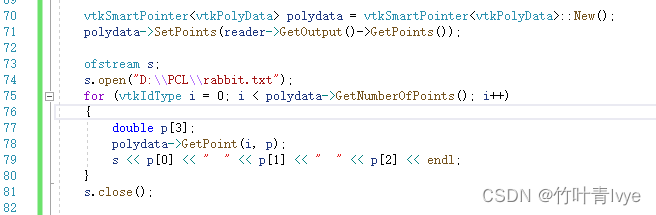
5.VTK保存数据到txt文本中
在上面代码的基础上增加如下代码(polydata->SetPoints(reader->GetOutput()->GetPoints()):
6.VTK读txt数据并转化为vtk数据
代码如下,读入一个txt文本,然后进行数据的转换
// test_vtk63.cpp : 定义控制台应用程序的入口点。
//
// test_mfc_showDlg.h: 头文件
//
#include <tchar.h>
#include "vtkAutoInit.h"
VTK_MODULE_INIT(vtkRenderingOpenGL2);
VTK_MODULE_INIT(vtkInteractionStyle);
#include <boost/thread/thread.hpp> //多线程
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/io/io.h>
#include <pcl/io/pcd_io.h>//pcd 读写类相关的头文件。
#include <pcl/io/ply_io.h>
#include <pcl/PCLPointCloud2.h>
#include <pcl/point_types.h> //PCL中支持的点类型头文件。
#include <pcl/common/common_headers.h>
#include <pcl/console/parse.h>
#include <pcl/point_types.h>
#include <pcl/range_image/range_image.h>
#include <pcl/visualization/range_image_visualizer.h>
#include <pcl/visualization/pcl_visualizer.h>
#include "vtkCommand.h"
#include "vtkRenderer.h"
#include "vtkCellPicker.h"
#include "vtkProperty.h"
#include "vtkPlaneSource.h"
#include "vtkMetaImageReader.h"
#include "vtkImagePlaneWidget.h"
#include "vtkPlaneSource.h"
#include "vtkPlane.h"
#include "vtkSmartPointer.h"
#include "vtkResliceCursorActor.h"
#include "vtkResliceCursorPolyDataAlgorithm.h"
#include "vtkResliceCursor.h"
#include "vtkResliceCursorWidget.h"
#include "vtkResliceCursorLineRepresentation.h"
#include "vtkResliceCursorThickLineRepresentation.h"
#include <vtkVertexGlyphFilter.h>
#include "vtkImageReader2Factory.h"
#include "vtkImageReader2.h"
using namespace pcl;
using namespace pcl::io;
using namespace std;
using pcl::visualization::PointCloudColorHandlerGenericField;
using pcl::visualization::PointCloudColorHandlerCustom;
void testvtk2()
{
//istringstream istr;
//string line, str;
//while (getline(cin, line))//从终端接收一行字符串,并放入字符串line中
//{
// istr.str(line);//把line中的字符串存入字符串流中
// while (istr >> str)//每次读取一个单词(以空格为界),存入str中
// {
// cout << str << endl;
// }
//}
//std::string filename = "Points.txt";
// std::ifstream filestream(filename.c_str()); //文件流
// std::string line;
// vtkSmartPointer<vtkPoints> points = vtkSmartPointer<vtkPoints>::New();
// while(std::getline(filestream, line)) //整行读取文件
//{
// double x, y, z;
// std::stringstream linestream;
// linestream << line;
// linestream >> x >> y >> z;
// points->InsertNextPoint(x, y, z); //新读取的数据赋予点的几何结构
// }
// filestream.close(); //关闭文件流操作
vtkSmartPointer<vtkPoints> points = vtkSmartPointer<vtkPoints>::New();//key code
ifstream inFile;
inFile.open("D:\\PCL\\rabbit.txt");
double x, y, z;
while (inFile >> x >> y >> z)
{
points->InsertNextPoint(x, y, z);
}
vtkSmartPointer<vtkPolyData> polydata = vtkSmartPointer<vtkPolyData>::New();
polydata->SetPoints(points);
vtkSmartPointer<vtkVertexGlyphFilter> glyphFilter = vtkSmartPointer<vtkVertexGlyphFilter>::New();
glyphFilter->SetInputData(polydata);
glyphFilter->Update();
vtkPolyDataMapper* dataMapper = vtkPolyDataMapper::New();
dataMapper->SetInputConnection(glyphFilter->GetOutputPort());
vtkActor* coneActor = vtkActor::New();
coneActor->SetMapper(dataMapper);
coneActor->GetProperty()->SetColor(1.0, 0.0, 0.0);//设置对象颜色为红色
//方法2:设置演员颜色
//vtkProperty* coneProperty = vtkProperty::New();//设置一个Property对象
//coneProperty->SetColor(1.0, 0.0, 0.0);
//coneActor->SetProperty(coneProperty);
//渲染器:创建一个渲染器,添加要渲染的演员
vtkSmartPointer<vtkRenderer> m_Renderer;
vtkSmartPointer<vtkRenderWindow> m_RenderWindow;
m_Renderer = vtkSmartPointer<vtkRenderer>::New();
m_Renderer->AddActor(coneActor);
m_Renderer->SetBackground(0.1, 0.2, 0.4);
m_RenderWindow = vtkSmartPointer<vtkRenderWindow>::New();
m_RenderWindow->SetSize(500, 500);
m_RenderWindow->AddRenderer(m_Renderer);
vtkRenderWindowInteractor* interactor = vtkRenderWindowInteractor::New();//交互对象加入renWin窗口中
interactor->SetRenderWindow(m_RenderWindow);
m_RenderWindow->Render();//绘制舞台上的东西
interactor->Initialize();//交互对象初始化
interactor->Start();//开始交互事件
polydata->Delete();
glyphFilter->Delete();
dataMapper->Delete();
coneActor->Delete();
m_Renderer->Delete();
m_RenderWindow->Delete();
interactor->Delete();
//if (m_RenderWindow->GetInteractor() == NULL)
//{
// vtkSmartPointer<vtkRenderWindowInteractor> RenderWindowInteractor =
// vtkSmartPointer<vtkRenderWindowInteractor>::New();
// RenderWindowInteractor->SetRenderWindow(m_RenderWindow);
// RenderWindowInteractor->Initialize();
//}
}
int _tmain(int argc, _TCHAR* argv[])
{
testvtk2();
return 0;
}
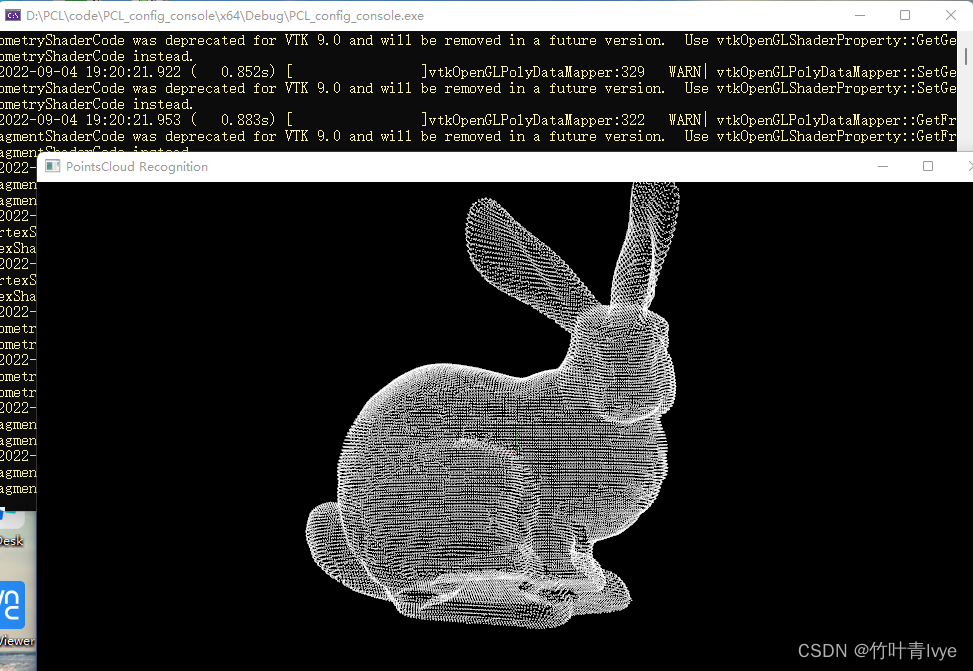
显示效果如下:

7.PCL读入txt数据显示
代码如下:
// test_vtk63.cpp : 定义控制台应用程序的入口点。
//
#include <stdio.h>
#include <tchar.h>
#include "vtkAutoInit.h"
//VTK_MODULE_INIT(vtkRenderingOpenGL2);
//VTK_MODULE_INIT(vtkInteractionStyle);
//#define vtkRenderingCore_AUTOINIT 2(vtkRenderingOpenGL2, vtkInteractionStyle)
#include <boost/thread/thread.hpp>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/io/io.h>
#include <pcl/io/pcd_io.h>//pcd 读写类相关的头文件。
#include <pcl/PCLPointCloud2.h>
#include <pcl/visualization/range_image_visualizer.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <iostream>
using namespace pcl;
using namespace pcl::io;
using namespace std;
int testpointcloudToPcd()
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
ifstream in0;
in0.open("D:\\PCL\\rabbit.txt");
if (!in0.is_open())
{
cout << "error open!" << endl;
return -1;
}
//a,b为符号
int count = 0;
double x, y, z;
while (in0 >> x >> y >> z)
{
pcl::PointXYZ cltmp(x, y, z);
cloud->points.push_back(cltmp);
count++;
}
std::cout << "start to save pointcloud...";
cloud->width = count; //设置点云宽度
cloud->height = 1; //设置点云高度
cloud->is_dense = false;//判断points中的数据是否是有限的(有限为true)或者说是判断点云中的点是否包含 Inf/NaN这种值(包含为false)。
//为false或者true并不影响结果,是否为密度点云
//pcl::io::savePCDFileASCII("D:\\mycode\\0-PCL_VTK\\pryamid_yidong10.pcd", *cloud);
/*pcl::io::savePCDFileBinary("D:\\mycode\\0-PCL_VTK\\pryamid1.pcd", *cloud);
pcl::io::savePCDFile("D:\\mycode\\0-PCL_VTK\\pryamid2.pcd", *cloud);*/
std::cout << "save completed!start to show" << std::endl;
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("PointsCloud Recognition"));
viewer->addPointCloud(cloud, "model_cloud");
viewer->addCoordinateSystem(1.0);
viewer->initCameraParameters();
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
}
int _tmain(int argc, _TCHAR* argv[])
{
testpointcloudToPcd();
return 0;
}
8.常见点云文件格式介绍
这边列举了一些博客用于参考
(1)PCD
点云库PCL入门1:存储点云数据的pcd文件简介 - 知乎
PCL:点云数据(*.pcd)文件格式详解_孙 悟 空的博客-CSDN博客_pcd格式
PCL中PCD(Point Cloud Data)文件格式解析_SOC罗三炮的博客-CSDN博客_pcd文件
(2) PLY
PLY文件格式 - 慕尘 - 博客园
(3) Step
一篇文章了解STEP文件格式 - 知乎
https://www.jianshu.com/p/ccfc77d0ee45
9.PCL读写点云文件
这边列举了一些博客用于参考
PCL读写pcd文件 - 知乎
PCL:读写pcd点云的两种方式_孙 悟 空的博客-CSDN博客_pcl读取pcd
ply las pcd等一些常见的基本点云文件格式的读写方法_qq_46084757的博客-CSDN博客_ply点云
PCL入门系列三——PCL进行数据读写 - 知乎
点云学习----PCL读写点云_刚上路DE小白的博客-CSDN博客_pcl读取点云
10.VTK数据处理
VTK图像处理(二)--vtkPolyData数据处理 - 知乎
11. 八叉树
如下的一些帖子,博主觉得可参考
百度安全验证
PCL学习笔记(六)-- k-d tree_看到我请叫我学C++的博客-CSDN博客
PCL学习笔记(七)-- 八叉树OcTree_八叉树写法_看到我请叫我学C++的博客-CSDN博客
https://www.cnblogs.com/z-web-2017/p/14111071.html
【图形学】基于点云生成树木模型_树木点云_wk_119的博客-CSDN博客
一文搞懂k近邻(k-NN)算法(一) - 知乎