如何使用PCL将XYZRGB点云转换为彩色mesh模型
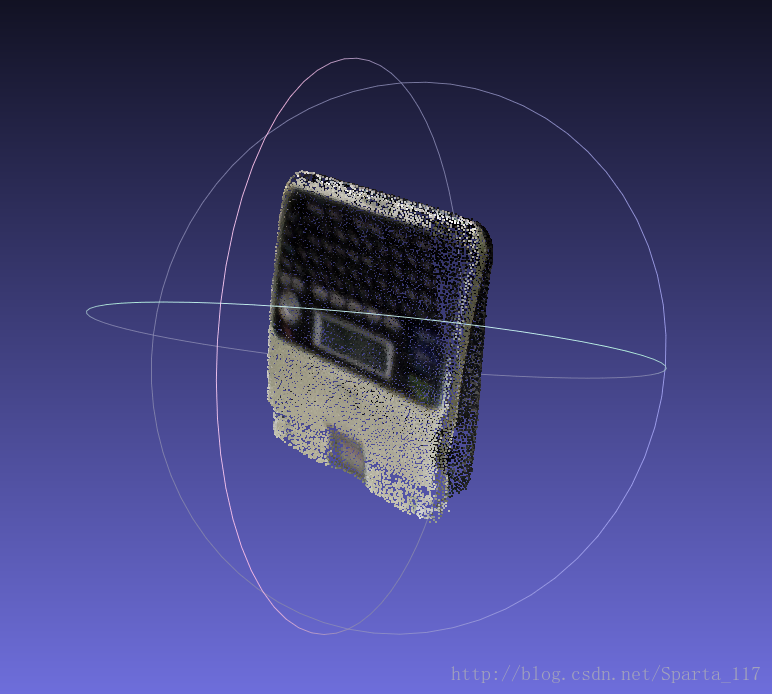
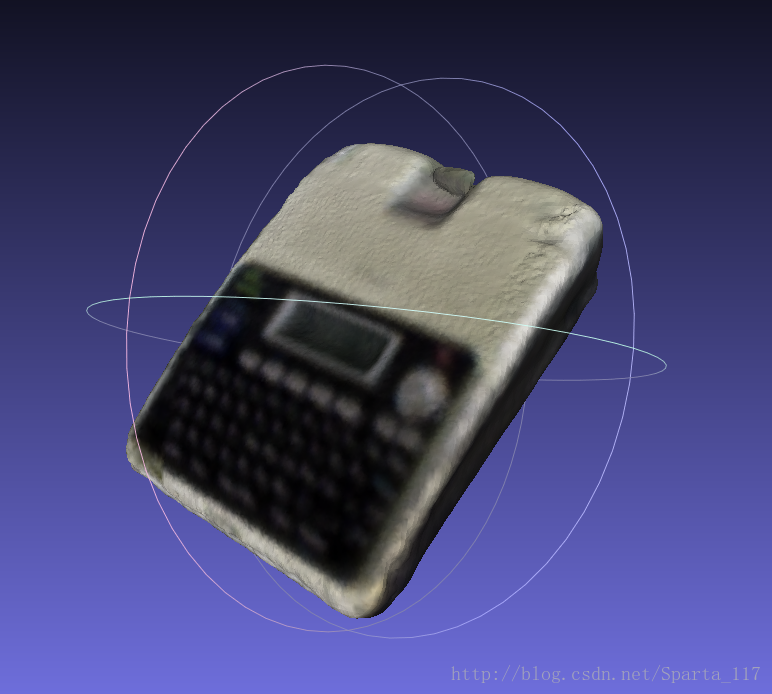
最近完成了一个使用RGBD传感器,构建物体模型的小demo。其中有点难的最后一步是如何将获得的物体点云变成彩色mesh模型。效果图如下(从点云变成彩色mesh):
其实整体的步骤可以总结如下:
[1]计算点云法向,并将法向量指向内部
[2]将点云法向信息叠加在原点云上,生成pcl::PointXYZRGBNormal格式的点云
[3]使用泊松重建(poisson reconstruction)建立无颜色mesh。
[4]使用kdtree将原点云的信息映射在无颜色mesh上,并生成彩色mesh。
下面具体介绍一下各步骤:
[1]计算点云法向
使用pcl::NormalEstimationOMP设定法向估算对象。这里使用的算法实质上是主成分分析(PCA)。先设定每个点周围选取的临近点数和搜索半径,并用临近点建立一个协方差矩阵C。

这里K指的是离点P的最近的K个点,是最近邻的中心。后面的式子就是特征值和特征向量了。而C的最小特征值对应的特征向量就是该点的法向量。
但是泊松重建需要的是指向物体内部的法向量,所以我们还要将向量反转过来。
[2]将点云法向信息叠加在原点云上,生成pcl::PointXYZRGBNormal格式的点云
这一步比较简单,使用的是pcl::concatenateFields,可以将两种不同格式的点云组合起来。
[3]使用泊松重建(poisson reconstruction)建立无颜色mesh。
泊松重建的原理比较复杂,我也没有完全弄清楚。先留下这个坑,以后清楚了再填。大致的算法如下:
1、为点云设定八叉树搜索索引,使得每个采样点都落在深度为D的叶节点。
2、设定函数空间。
3、创建向量场。这一步我理解就是用到了之前算出的法向量。
4、求解泊松方程。
5、提取等值面,从而得到重建表面。
pcl中对应的是pcl::Poisson可以设定泊松处理对象。但是泊松重建后生成的mesh是没有RGB信息的。目前,PCL官方也说泊松重建不带有颜色信息,需要我们自己添加。
[4]使用kdtree将原点云的信息映射在无颜色mesh上,并生成彩色mesh。
这一步在网上基本找不到信息,所以我研究了一下。最终还是在一个user mailing的回答里得到了启发。我们可以使用kd tree在原RGB点云上建立一个搜索索引,然后对mesh上的每一个点都搜索对应原RGB点云上的临近点。然后求得这些对应临近点的RGB通道均值,作为mesh上那个点的颜色信息就好了。
这里值得注意的是两个转换函数pcl::fromPCLPointCloud2和pcl::toPCLPointCloud2,其作用分别是将mesh的信息转为点云和将点云信息转进mesh。
最后,就放一下源码啦。
void poisson_reconstruction(pcl::PointCloud<pcl::PointXYZRGBA>::Ptr object_cloud)
{
PointCloud<PointXYZRGB>::Ptr cloud(new PointCloud<PointXYZRGB>());
pcl::copyPointCloud(*object_cloud, *cloud);
PointCloud<PointXYZRGB>::Ptr filtered(new PointCloud<PointXYZRGB>());
PassThrough<PointXYZRGB> filter;
filter.setInputCloud(cloud);
filter.filter(*filtered);
cout << "passthrough filter complete" << endl;
cout << "begin normal estimation" << endl;
NormalEstimationOMP<PointXYZRGB, Normal> ne;//计算点云法向
ne.setNumberOfThreads(8);//设定临近点
ne.setInputCloud(filtered);
ne.setRadiusSearch(0.01);//设定搜索半径
Eigen::Vector4f centroid;
compute3DCentroid(*filtered, centroid);//计算点云中心
ne.setViewPoint(centroid[0], centroid[1], centroid[2]);//将向量计算原点置于点云中心
PointCloud<Normal>::Ptr cloud_normals (new PointCloud<Normal>());
ne.compute(*cloud_normals);
cout << "normal estimation complete" << endl;
cout << "reverse normals' direction" << endl;
//将法向量反向
for(size_t i = 0; i < cloud_normals->size(); ++i)
{
cloud_normals->points[i].normal_x *= -1;
cloud_normals->points[i].normal_y *= -1;
cloud_normals->points[i].normal_z *= -1;
}
//融合RGB点云和法向
cout << "combine points and normals" << endl;
PointCloud<PointXYZRGBNormal>::Ptr cloud_smoothed_normals(new PointCloud<PointXYZRGBNormal>());
concatenateFields(*filtered, *cloud_normals, *cloud_smoothed_normals);
//泊松重建
cout << "begin poisson reconstruction" << endl;
Poisson<PointXYZRGBNormal> poisson;
//poisson.setDegree(2);
poisson.setDepth(8);
poisson.setSolverDivide (6);
poisson.setIsoDivide (6);
poisson.setConfidence(false);
poisson.setManifold(false);
poisson.setOutputPolygons(false);
poisson.setInputCloud(cloud_smoothed_normals);
PolygonMesh mesh;
poisson.reconstruct(mesh);
cout << "finish poisson reconstruction" << endl;
//给mesh染色
PointCloud<PointXYZRGB> cloud_color_mesh;
pcl::fromPCLPointCloud2(mesh.cloud, cloud_color_mesh);
pcl::KdTreeFLANN<pcl::PointXYZRGB> kdtree;
kdtree.setInputCloud (cloud);
// K nearest neighbor search
int K = 5;
std::vector<int> pointIdxNKNSearch(K);
std::vector<float> pointNKNSquaredDistance(K);
for(int i=0;i<cloud_color_mesh.points.size();++i)
{
uint8_t r = 0;
uint8_t g = 0;
uint8_t b = 0;
float dist = 0.0;
int red = 0;
int green = 0;
int blue = 0;
uint32_t rgb;
if ( kdtree.nearestKSearch (cloud_color_mesh.points[i], K, pointIdxNKNSearch, pointNKNSquaredDistance) > 0 )
{
for (int j = 0; j < pointIdxNKNSearch.size (); ++j)
{
r = cloud->points[ pointIdxNKNSearch[j] ].r;
g = cloud->points[ pointIdxNKNSearch[j] ].g;
b = cloud->points[ pointIdxNKNSearch[j] ].b;
red += int(r);
green += int(g);
blue += int(b);
dist += 1.0/pointNKNSquaredDistance[j];
std::cout<<"red: "<<int(r)<<std::endl;
std::cout<<"green: "<<int(g)<<std::endl;
std::cout<<"blue: "<<int(b)<<std::endl;
cout<<"dis:"<<dist<<endl;
}
}
cloud_color_mesh.points[i].r = int(red/pointIdxNKNSearch.size ()+0.5);
cloud_color_mesh.points[i].g = int(green/pointIdxNKNSearch.size ()+0.5);
cloud_color_mesh.points[i].b = int(blue/pointIdxNKNSearch.size ()+0.5);
}
toPCLPointCloud2(cloud_color_mesh, mesh.cloud);
io::savePLYFile("/home/xxx/3d_model_building/src/make_model/result/object_mesh.ply", mesh);
}
如有问题,还请大家指出。
参考资料:
[1]http://blog.csdn.net/qq_25491201/article/details/51100073
[2]http://blog.csdn.net/jennychenhit/article/details/52126156?locationNum=8
[3]https://wenku.baidu.com/view/23c5637a31b765ce050814d2.html