给个面子,点赞转发评论,哈哈!
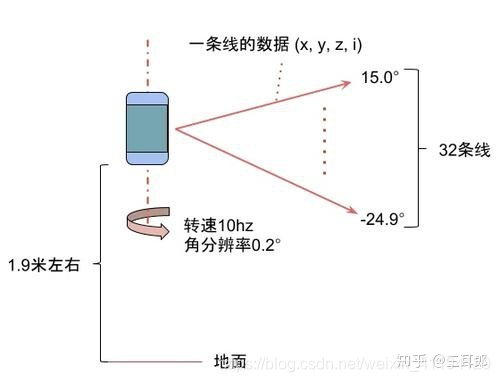
扫描频率是转速的意思,10Hz就是一秒转10圈。
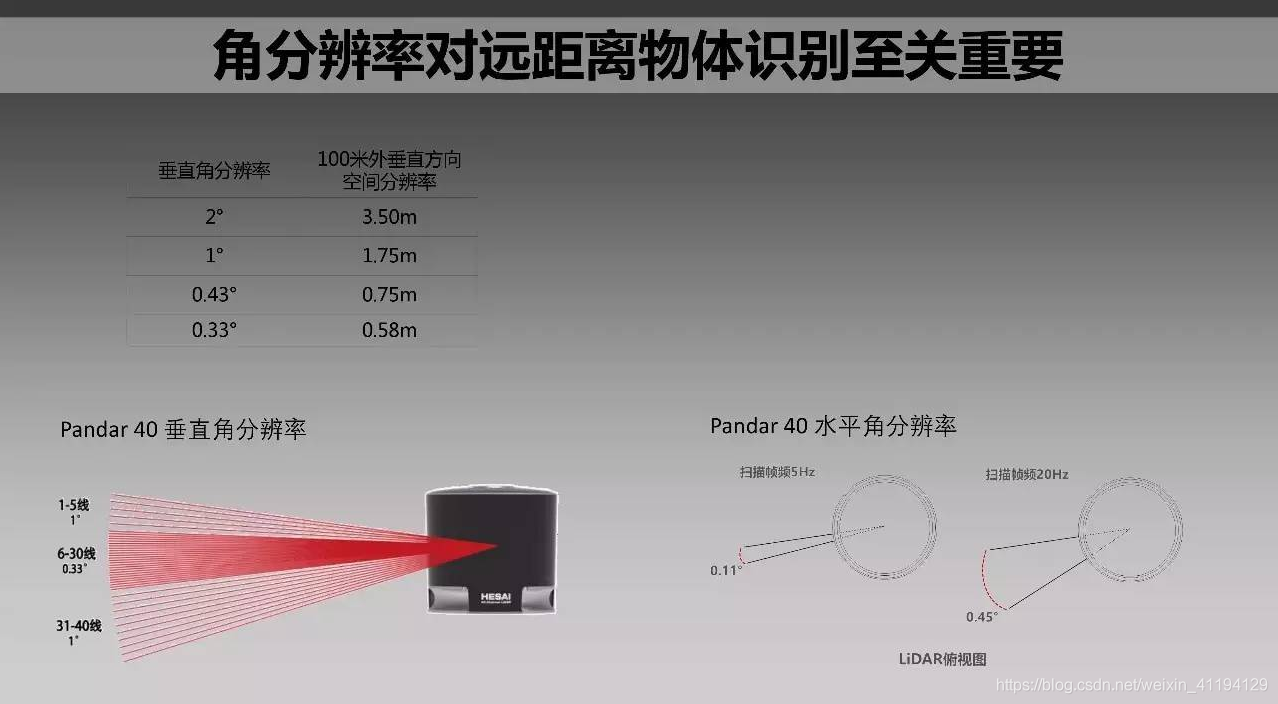
激光雷达输出的图像也被称为“点云”图像,相邻两个点之间的夹角就是角分辨率。
一幅点云图像代表一帧,对应到激光雷达内部就是电机旋转一圈完成扫描。帧率即代表一秒钟内激光雷达电机旋转的圈数,也就是每秒钟完成一圈扫描的次数。
由于激光雷达的采样率是一定的,因此帧率越高,角分辨率越低;帧率越低,角分辨率越高。
采样率表示激光雷达每秒钟进行有效采集的次数,可直观理解为一秒内产生的点云数目。采样率可以通过角分辨率和帧率计算:
角分辨率0.08°时,每一帧的点云数目:360°/0.08°= 4500;
每秒10帧,则每秒的点云数目:4500×10=45000;
所以PAVO的采样率为45kHz。
参考文献:
https://www.leiphone.com/news/201801/oySuWNzftbNrWwpv.html
https://www.sohu.com/a/302268573_473608
https://www.zhihu.com/question/405457595
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)