1.准备工作
- imu绑定串口
- 有线连接雷达并能用rviz显示雷达点云
- 用两个imu标定包标定imu
- 在完成第二步必要的工作后,配置LIO-SAM/config/下的params.yaml参数,更改之前建议备份在旁边复制粘贴一份params(copy).yaml
- 并更改imu和雷达话题
- 将rs_lidar数据格式改成velodyne(用了一个ros文件,已加在launch文件中)
 注: 注意 velodyne_points和imu/data前无斜杠(rostopic list里话题是/velodyne_points和/imu/data )
注: 注意 velodyne_points和imu/data前无斜杠(rostopic list里话题是/velodyne_points和/imu/data )

打开前面imu_utils标定的结果按照数字编号对应粘贴覆盖掉params.yaml数值

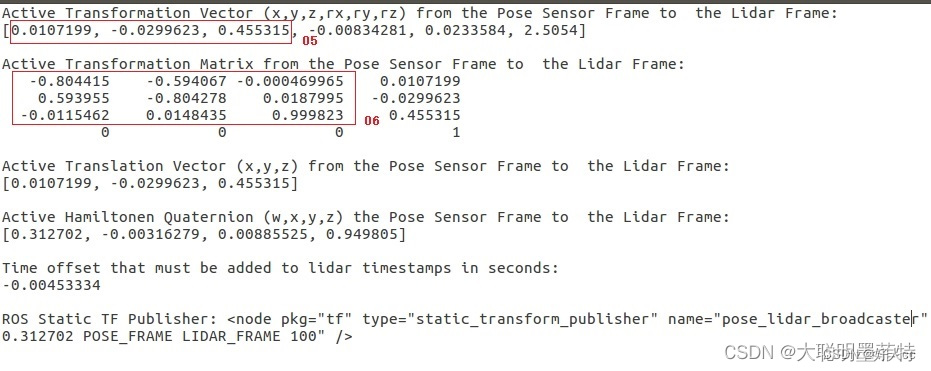
打开前面lidar_align标定的结果按照数字编号对应粘贴覆盖掉params.yaml数值
params.yaml编号06编号07数值一样都用lidar_align的标定结果编号06三阶矩阵
2一些细节上的工作
2.1编译rs_to_velodyne-master功能包(转换激光雷达的数据类型)
2.2lio_sam的LIO-SAM/config/下的params.yaml参数修改
lio_sam:
# Topics
pointCloudTopic: "velodyne_points" # Point cloud data
imuTopic: "imu/data_open" # IMU data
odomTopic: "odometry/imu" # IMU pre-preintegration odometry, same frequency as IMU
# gpsTopic: "odometry/gps" # GPS odometry topic from navsat, see module_navsat.launch file
gpsTopic: "odometry/gps"
# Frames
lidarFrame: "base_link"
baselinkFrame: "base_link"
odometryFrame: "odom"
mapFrame: "map"
# GPS Settings
useImuHeadingInitialization: false # if using GPS data, set to "true"
useGpsElevation: false # if GPS elevation is bad, set to "false"
gpsCovThreshold: 2.0 # m^2, threshold for using GPS data
poseCovThreshold: 25.0 # m^2, threshold for using GPS data
# Export settings
savePCD: false # https://github.com/TixiaoShan/LIO-SAM/issues/3
savePCDDirectory: "/Downloads/LOAM/" # in your home folder, starts and ends with "/". Warning: the code deletes "LOAM" folder then recreates it. See "mapOptimization" for implementation
# Sensor Settings
sensor: velodyne # lidar sensor type, either 'velodyne' or 'ouster'
N_SCAN: 16 # number of lidar channel (i.e., 16, 32, 64, 128)
Horizon_SCAN: 1800 # lidar horizontal resolution (Velodyne:1800, Ouster:512,1024,2048)
downsampleRate: 1 # default: 1. Downsample your data if too many points. i.e., 16 = 64 / 4, 16 = 16 / 1
lidarMinRange: 1.0 # default: 1.0, minimum lidar range to be used
lidarMaxRange: 1000.0 # default: 1000.0, maximum lidar range to be used
# IMU Settings
imuAccNoise: 1.0151327754116719e-02
imuGyrNoise: 4.9553027388650394e-03
imuAccBiasN: 7.4655794718659740e-04
imuGyrBiasN: 6.3727249626266877e-05
imuGravity: 9.8035
imuRPYWeight: 0.01
# Extrinsics (lidar -> IMU)
extrinsicTrans: [0.0, 0.0, 0.0]
extrinsicRot: [1, 0, 0,
0, 1, 0,
0, 0, 1]
extrinsicRPY: [1, 0, 0,
0, 1, 0,
0, 0, 1]
# extrinsicRot: [1, 0, 0,
# 0, 1, 0,
# 0, 0, 1]
# extrinsicRPY: [1, 0, 0,
# 0, 1, 0,
# 0, 0, 1]
# LOAM feature threshold
edgeThreshold: 1.0
surfThreshold: 0.1
edgeFeatureMinValidNum: 10
surfFeatureMinValidNum: 100
# voxel filter paprams
odometrySurfLeafSize: 0.4 # default: 0.4 - outdoor, 0.2 - indoor
mappingCornerLeafSize: 0.2 # default: 0.2 - outdoor, 0.1 - indoor
mappingSurfLeafSize: 0.4 # default: 0.4 - outdoor, 0.2 - indoor
# robot motion constraint (in case you are using a 2D robot)
z_tollerance: 1000 # meters
rotation_tollerance: 1000 # radians
# CPU Params
numberOfCores: 4 # number of cores for mapping optimization
mappingProcessInterval: 0.15 # seconds, regulate mapping frequency
# Surrounding map
surroundingkeyframeAddingDistThreshold: 1.0 # meters, regulate keyframe adding threshold
surroundingkeyframeAddingAngleThreshold: 0.2 # radians, regulate keyframe adding threshold
surroundingKeyframeDensity: 2.0 # meters, downsample surrounding keyframe poses
surroundingKeyframeSearchRadius: 50.0 # meters, within n meters scan-to-map optimization (when loop closure disabled)
# Loop closure
loopClosureEnableFlag: true
loopClosureFrequency: 1.0 # Hz, regulate loop closure constraint add frequency
surroundingKeyframeSize: 50 # submap size (when loop closure enabled)
historyKeyframeSearchRadius: 15.0 # meters, key frame that is within n meters from current pose will be considerd for loop closure
historyKeyframeSearchTimeDiff: 30.0 # seconds, key frame that is n seconds older will be considered for loop closure
historyKeyframeSearchNum: 25 # number of hostory key frames will be fused into a submap for loop closure
historyKeyframeFitnessScore: 0.3 # icp threshold, the smaller the better alignment
# Visualization
globalMapVisualizationSearchRadius: 1000.0 # meters, global map visualization radius
globalMapVisualizationPoseDensity: 10.0 # meters, global map visualization keyframe density
globalMapVisualizationLeafSize: 1.0 # meters, global map visualization cloud density
# Navsat (convert GPS coordinates to Cartesian)
navsat:
frequency: 50
wait_for_datum: false
delay: 0.0
magnetic_declination_radians: 0
yaw_offset: 0
zero_altitude: true
broadcast_utm_transform: false
broadcast_utm_transform_as_parent_frame: false
publish_filtered_gps: false
# EKF for Navsat
ekf_gps:
publish_tf: false
map_frame: map
odom_frame: odom
base_link_frame: base_link
world_frame: odom
frequency: 50
two_d_mode: false
sensor_timeout: 0.01
# -------------------------------------
# External IMU:
# -------------------------------------
imu0: imu_correct
# make sure the input is aligned with ROS REP105. "imu_correct" is manually transformed by myself. EKF can also transform the data using tf between your imu and base_link
imu0_config: [false, false, false,
true, true, true,
false, false, false,
false, false, true,
true, true, true]
imu0_differential: false
imu0_queue_size: 50
imu0_remove_gravitational_acceleration: true
# -------------------------------------
# Odometry (From Navsat):
# -------------------------------------
odom0: odometry/gps
odom0_config: [true, true, true,
false, false, false,
false, false, false,
false, false, false,
false, false, false]
odom0_differential: false
odom0_queue_size: 10
# x y z r p y x_dot y_dot z_dot r_dot p_dot y_dot x_ddot y_ddot z_ddot
process_noise_covariance: [ 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 10.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0.03, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0.03, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0.1, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0.25, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0.25, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0.04, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0.01, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.01, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.5, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.01, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.01, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.015]
2.3rs_lidar的CMakeLists.txt文件修改了# Custom Point Type (XYZI, XYZIRT)
cmake_minimum_required(VERSION 3.5)
cmake_policy(SET CMP0048 NEW)
project(rslidar_sdk)
#=======================================
# Compile setup (ORIGINAL, CATKIN, COLCON)
#=======================================
set(COMPILE_METHOD CATKIN)
#=======================================
# Custom Point Type (XYZI, XYZIRT)
#=======================================
set(POINT_TYPE XYZIRT)
#========================
# Project details / setup
#========================
set(PROJECT_NAME rslidar_sdk)
add_definitions(-DPROJECT_PATH="${PROJECT_SOURCE_DIR}")
set(CMAKE_BUILD_TYPE RELEASE)
add_definitions(-O3)
add_definitions(-std=c++14)
add_compile_options(-Wall)
#========================
# Dependencies Setup
#========================
#ROS#
find_package(roscpp 1.12 QUIET)
if(roscpp_FOUND)
message(=============================================================)
message("-- ROS Found, Ros Support is turned On!")
message(=============================================================)
add_definitions(-DROS_FOUND)
include_directories(${roscpp_INCLUDE_DIRS})
else(roscpp_FOUND)
message(=============================================================)
message("-- ROS Not Found, Ros Support is turned Off!")
message(=============================================================)
endif(roscpp_FOUND)
#ROS2#
find_package(rclcpp QUIET)
if(rclcpp_FOUND AND ${COMPILE_METHOD} STREQUAL "COLCON")
find_package(ament_cmake REQUIRED)
find_package(sensor_msgs REQUIRED)
find_package(rslidar_msg REQUIRED)
find_package(std_msgs REQUIRED)
set(CMAKE_CXX_STANDARD 14)
message(=============================================================)
message("-- ROS2 Found, Ros2 Support is turned On!")
message(=============================================================)
add_definitions(-DROS2_FOUND)
include_directories(${rclcpp_INCLUDE_DIRS})
else(rclcpp_FOUND AND ${COMPILE_METHOD} STREQUAL "COLCON")
message(=============================================================)
message("-- ROS2 Not Found, Ros2 Support is turned Off!")
message(=============================================================)
endif(rclcpp_FOUND AND ${COMPILE_METHOD} STREQUAL "COLCON")
#Protobuf#
find_package(Protobuf QUIET)
find_program(PROTOC protoc)
if(NOT PROTOC MATCHES "NOTFOUND" AND Protobuf_FOUND)
message(=============================================================)
message("-- Protobuf Found, Protobuf Support is turned On!")
message(=============================================================)
add_definitions(-DPROTO_FOUND)
include_directories(${PROTOBUF_INCLUDE_DIRS})
SET(PROTO_FILE_PATH ${PROJECT_SOURCE_DIR}/src/msg/proto_msg)
file(GLOB PROTOBUF_FILELIST ${PROTO_FILE_PATH}/*.proto)
foreach(proto_file ${PROTOBUF_FILELIST})
message(STATUS "COMPILING ${proto_file} USING ${PROTOBUF_PROTOC_EXECUTABLE}")
execute_process(COMMAND ${PROTOBUF_PROTOC_EXECUTABLE}
--proto_path=${PROTO_FILE_PATH}
--cpp_out=${PROTO_FILE_PATH}
${proto_file})
endforeach()
else(NOT PROTOC MATCHES "NOTFOUND" AND Protobuf_FOUND)
message(=============================================================)
message("-- Protobuf Not Found, Protobuf Support is turned Off!")
message(=============================================================)
endif(NOT PROTOC MATCHES "NOTFOUND" AND Protobuf_FOUND)
#Others#
find_package(yaml-cpp REQUIRED)
find_package(PCL QUIET REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
#Catkin#
if(${COMPILE_METHOD} STREQUAL "CATKIN")
find_package(catkin REQUIRED COMPONENTS
roscpp
sensor_msgs
)
catkin_package(
CATKIN_DEPENDS sensor_msgs
)
endif(${COMPILE_METHOD} STREQUAL "CATKIN")
#Include directory#
include_directories(${PROJECT_SOURCE_DIR}/src)
#Driver core#
add_subdirectory(src/rs_driver)
find_package(rs_driver REQUIRED)
include_directories(${rs_driver_INCLUDE_DIRS})
#========================
# Point Type Definition
#========================
if(${POINT_TYPE} STREQUAL "XYZI")
add_definitions(-DPOINT_TYPE_XYZI)
elseif(${POINT_TYPE} STREQUAL "XYZIRT")
add_definitions(-DPOINT_TYPE_XYZIRT)
endif()
message(=============================================================)
message("-- POINT_TYPE is ${POINT_TYPE}")
message(=============================================================)
#========================
# Build Setup
#========================
#Protobuf#
if(NOT PROTOC MATCHES "NOTFOUND" AND Protobuf_FOUND)
add_executable(rslidar_sdk_node
node/rslidar_sdk_node.cpp
src/manager/adapter_manager.cpp
${PROTO_FILE_PATH}/packet.pb.cc
${PROTO_FILE_PATH}/scan.pb.cc
${PROTO_FILE_PATH}/point_cloud.pb.cc
)
target_link_libraries(rslidar_sdk_node
${PCL_LIBRARIES}
${YAML_CPP_LIBRARIES}
${PROTOBUF_LIBRARY}
${rs_driver_LIBRARIES}
)
else(NOT PROTOC MATCHES "NOTFOUND" AND Protobuf_FOUND)
add_executable(rslidar_sdk_node
node/rslidar_sdk_node.cpp
src/manager/adapter_manager.cpp
)
target_link_libraries(rslidar_sdk_node
${PCL_LIBRARIES}
${YAML_CPP_LIBRARIES}
${rs_driver_LIBRARIES}
)
endif(NOT PROTOC MATCHES "NOTFOUND" AND Protobuf_FOUND)
#Ros#
if(roscpp_FOUND)
target_link_libraries(rslidar_sdk_node ${roscpp_LIBRARIES})
endif(roscpp_FOUND)
#Ros2#
if(rclcpp_FOUND AND ${COMPILE_METHOD} STREQUAL "COLCON")
ament_target_dependencies(rslidar_sdk_node rclcpp sensor_msgs std_msgs rslidar_msg)
install(TARGETS
rslidar_sdk_node
DESTINATION lib/${PROJECT_NAME}
)
install(DIRECTORY
launch
rviz
DESTINATION share/${PROJECT_NAME}
)
ament_package()
endif(rclcpp_FOUND AND ${COMPILE_METHOD} STREQUAL "COLCON")
2.4将rs_lidar的启动文件start.launch做了修改,加了rs2vc.launch
<launch>
<node pkg="rslidar_sdk" name="rslidar_sdk_node" type="rslidar_sdk_node" output="screen">
</node>
<include file="$(find rs_to_velodyne)/launch/rs2vc.launch" />
<!-- 用cartographer时,将rviz注释掉 , 用AMCL时需将其解开注释-->
<!-- rviz -->
<!--<node pkg="rviz" name="rviz" type="rviz" args="-d $(find rslidar_sdk)/rviz/rviz.rviz" /> -->
</launch>
3.到这里准备工作就完成啦,给lidar和imu上电!
3.1启动imu 节点
roslaunch openzen_sensor openzen_lpms_ig1.launch
3.2 启动rs雷达
roslaunch rslidar_sdk start.launch
3.3启动lio_sam
roslaunch lio_sam run.launch
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)