一、由来
*自适应控制 AdaptiveControl(AC):AC旨在处理由结构参数扰动引起的不良影响。 AC的思想是首先在线识别受控系统的模型参数,然后根据识别的模型参数调整控制参数以获得良好的性能。
AC在处理模型参数不确定性方面非常有效,在实际工程中得到了广泛的应用。 AC 方法的成功应用通常高度依赖于对时变模型参数的识别或估计规律的设计。 当这些关键参数难以在线识别或估计时,这些方法不可用。
*鲁棒控制 Robust Control(RC):RC 侧重于研究控制器对抗模型不确定性的能力,是现代控制理论的一个重要分支。 RC 的控制设计保守地考虑了模型不确定性的最坏情况。 RC的鲁棒性一般是通过牺牲其他特征点的瞬态性能作为代价获得。 因此,RC经常被批评为过于保守。
*滑模控制 Sliding Model Control (SMC):SMC 在抑制参数扰动和外部扰动的影响方面具有很好的能力。 然而,控制器的不连续切换容易引起机械系统的高频颤振。 虽然采用饱和函数法等一些修正方法可以有效地减少颤振问题,但牺牲了抗扰性能突出的优势。 这些缺点严重制约了SMC的应用。
*内模控制 Internal Model Control (IMC):自 1980 年代初以来,Garcia 和 Morari 提出的 IMC 原理已被用于减弱控制系统中外部干扰的影响。 IMC以其简单的概念和直观的设计理念,在控制理论和应用领域都受到了极大的关注。 但是,IMC 通常只是用于线性系统。 此外,由于需要计算高维传递函数矩阵的逆矩阵,因此,高维系统的 IMC 算法的实现相当复杂。
上述控制方法的动机是通过反馈控制而不是前馈补偿控制来抑制干扰。 这些控制方法通常通过基于测量输出与其设定点之间的跟踪误差的反馈调节来实现干扰抑制的目标。 因此,设计的控制器在存在强扰动的情况下反应不够直接和足够快,尽管它们最终可以通过反馈调节以相对较慢的方式抑制扰动。 为此,这些控制方法通常被认为是被动抗干扰控制 passive antidisturbance control(PADC)方法。
为了克服PADC方法在处理干扰方面的局限性,人们提出了所谓的主动抗干扰控制active antidisturbance control (AADC)方法。 一般来说,AADC 背后的想法是通过基于干扰测量或估计的前馈补偿控制设计来直接抵消干扰。传统的前馈控制 feedforward control (FC) 被称为最早的 AADC 方法。
在FC框架下,首先采用传感器测量扰动; 其次,建立扰动通道模型; 最后,设计了一个前馈控制器,它采用了扰动测量以及过程和扰动通道的模型来抵消扰动。 FC是最直接、最主动的扰动衰减方法之一。但是FC的应用受限于以下原因。在实际的工业过程中,扰动是不可测量的、难以测量的,或者是可测量的但传感器过于昂贵。 例如,磨矿分级过程中给料矿石的硬度是无法测量的。
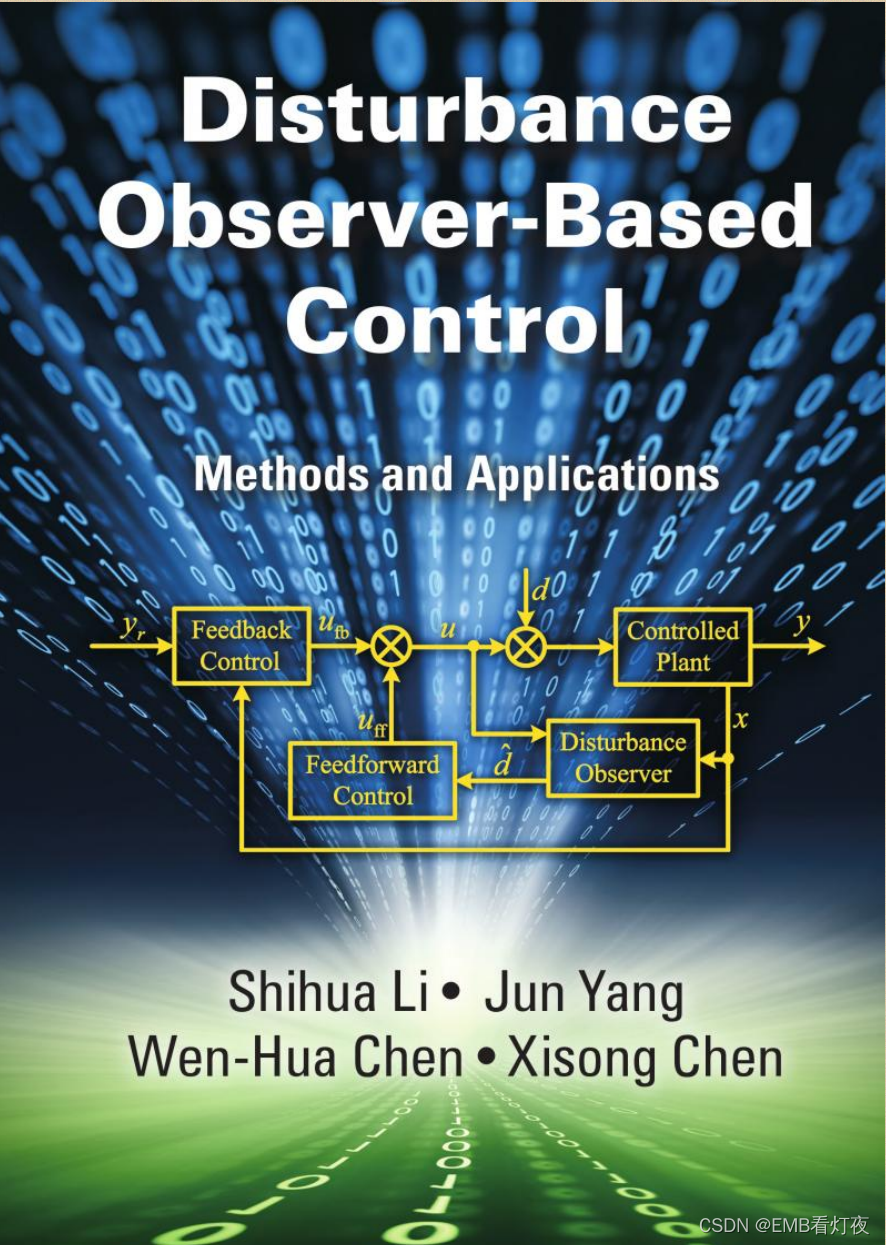
为了利用 FC 在抗扰方面的优势并克服上述缺点,对扰动估计技术(也称为软扰动测量)的研究得到了更多的关注。 扰动观测器 Disturbance observer(DO)是最有效、最流行的扰动估计技术之一。 基于扰动观测器的控制 Disturbance observer-based control(DOBC)在控制理论和控制工程领域都受到了广泛关注。 接下来将讨论 DOBC 方法的研究动机。
二、动机
例子:

其中 u 是控制输入,x 是状态,y 是感兴趣的受控输出,a 是系统参数,d 是扰动。 让 y 为期望输出达到的期望值,通常称为设定点或目标值。 不失一般性,为简单起见,本例中将设定值 y r 取为常数,即 。(上面一个小点表示导数)
。(上面一个小点表示导数)
定义系统的跟踪误差变量为 e_y = y_r − y,并将x = y = y_r - e_y 带入1.1的1式子,则系统(1.1)等价地描述为

这里的控制目标是根据跟踪误差和设定值设计一个控制律 u,即 u = u (e_y , y_r ),使得实际输出 y 达到其期望的设定值 y_r ,即跟踪 随着时间趋于无穷大,误差 y 趋于零。
下面详细探讨几种典型控制方法抑制干扰的基本原理。
2.1 高增益控制 High-Gain Control (高比例参数控制)
通常采用比例控制来实现控制对象,其中控制律被设计为:

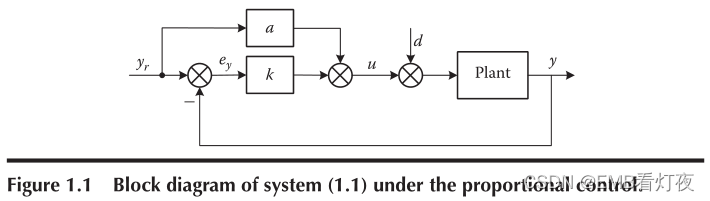
比例控制(1.2)下的闭环系统(1.1)框图如图1.1所示。 将控制律 (1.3) 代入系统 (1.2) 的第1式子得到 
其中 k 是要设计的比例增益。
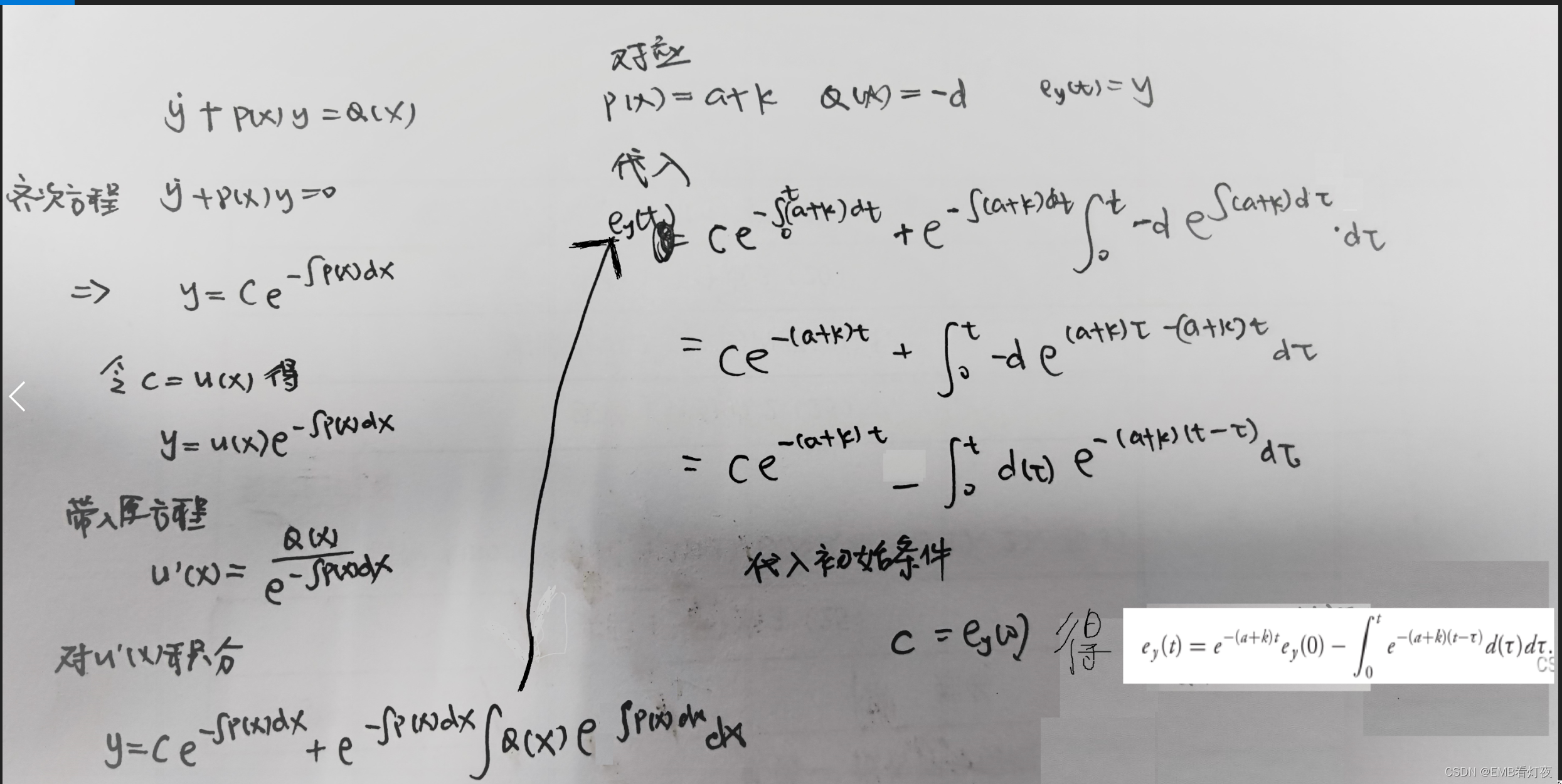
为了使闭环系统 (1.4) 稳定,必须设计 (1.2) 中的控制增益 k 使得 a + k > 0,即误差是下降的。由(1.4) 得出: (这一步实际上是解一阶非齐次微分方程,没有基础的请看我的博客解:一阶齐次或非齐次线性微分方程-详细推导)

具体推导过程:
在没有干扰的情况下,可以从 (1.5) 得出 y (∞) = 0,这意味着随着时间趋于无穷大,e_y将会趋近于0,输出最终将跟踪其设定点。
但是,在存在干扰的情况下,我们无法获得类似的结果。 假设系统中的扰动是有界的,并且满足|d(t)| < d^∗ 且 d^∗ > 0 时,则从 (1.5) 推导出来

推导过程:

取不等式两边的极限,方程(1.6)给出

特别地,假设扰动d(t)是一个常数,即d(t) = d_c 。由 (1.5) 得出

则结果为

可看出当时间趋于无穷时,误差依然存在且不能变小。
从(1.7)和(1.9)都可以得出结论,比例控制不能完全消除系统中由扰动(即使是恒定扰动)引起的影响。 在存在扰动的情况下,为了保持较小的跟踪偏移,必须设计更高的控制增益 k 来抑制扰动。 这是高增益控制抑制干扰的潜在理念。 实际上,这就是为什么许多先进的反馈控制方法(如 H ∞ 控制和鲁棒控制)被用于抗扰的原因。
*仿真实验
通过对参数 a = 0.7 的系统 (1.1) 进行仿真研究来评估高增益控制的性能。 参考信号被视为步长 y r (t) = 2。考虑步长扰动 d(t) = 2,并在 t = 1 秒时对系统施加干扰。 为了验证高增益控制的抗干扰性能,实现了三个不同的控制增益,分别为 k = 6、20 和 200,其中输出和输入响应分别如图 1.2(a) 和 (b) 所示,。
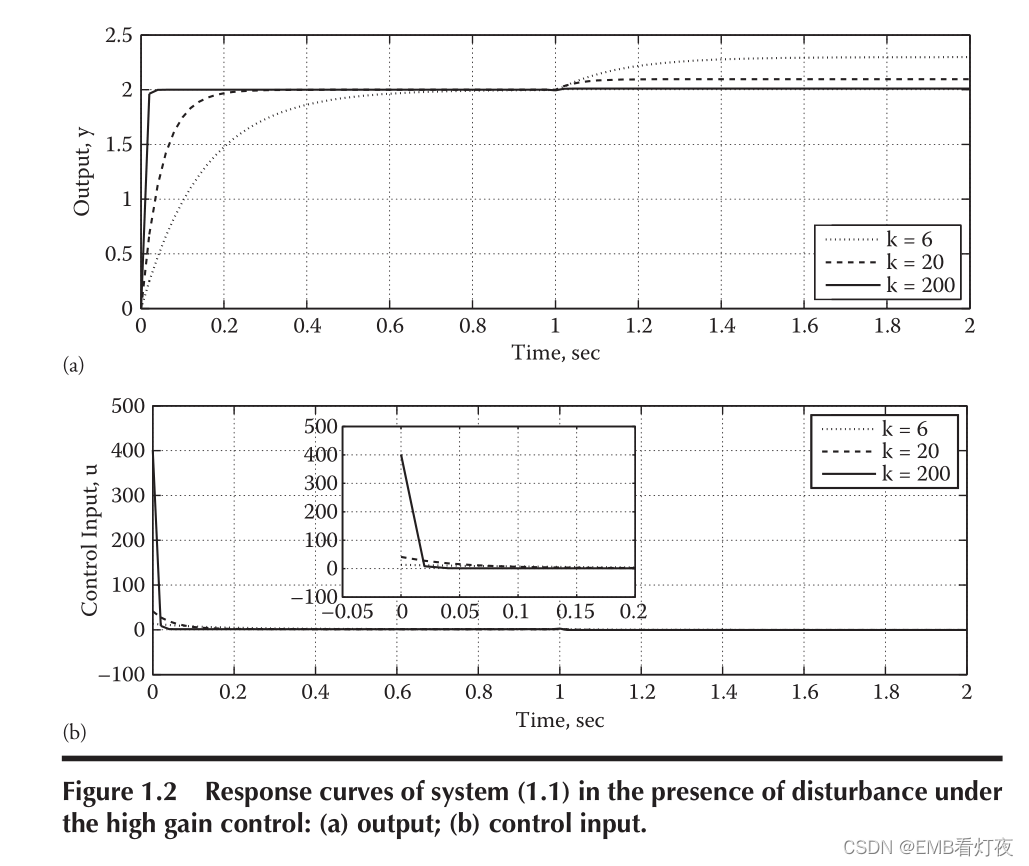
如图 1.2(a) 所示,在存在干扰的情况下,较高的控制增益通常会产生更快的跟踪响应和更小的偏移。 然而, 从图 1.2(b) 可以看出,通常需要相当高的控制能量才能实现更快的跟踪和抗扰性能。 该仿真场景的结果表明,高增益控制方法在抗扰和合理控制能量之间存在矛盾。
2.2 积分控制 Integral Control
在实际工程系统中,在存在干扰和不确定性的情况下,通常采用积分控制作用来消除偏差。积分控制律通常设计为

其中k_1 和 k_0 分别是要设计的 比例系数 和 积分系数。
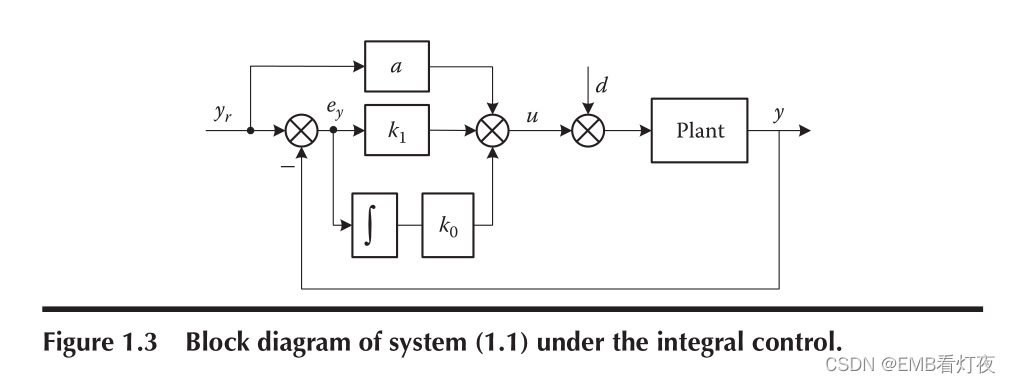
比例控制 (1.4) 下的闭环系统 (1.11) 框图如图 1.3 所示。 将控制律(1.4)代入跟踪误差系统(1.2),得到

取 (1.11) 两边的导数得到

设 ,则从 (1.12) 可以得出
,则从 (1.12) 可以得出

其中
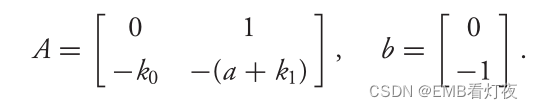
要实现闭环系统的渐近稳定性,则控制参数应满足k_0 > 0 和a + k_1 > 0(即A是Hurwitz矩阵。)
1、由Hurwitz矩阵表示的多项式为稳定的(多项式的所有根都有负实部);
2、线性常系数微分方程的系数矩阵为赫尔维茨矩阵时,该系统是渐近稳定的。
在存在恒定扰动的情况下,即 d’(t) = 0,因为 A 是 Hurwitz 矩阵,则由 (1.13)得 e(∞) = 0, 等价于  。这意味着积分控制最终可以从系统中消除由持续扰动引起的影响。 然而,积分控制不能消除由非恒定扰动引起的影响,例如谐波。假设(1.1)中的扰动是非常量的,且扰动函数有界,其导数也有界,即
。这意味着积分控制最终可以从系统中消除由持续扰动引起的影响。 然而,积分控制不能消除由非恒定扰动引起的影响,例如谐波。假设(1.1)中的扰动是非常量的,且扰动函数有界,其导数也有界,即 那么从 (1.13) 可推导出
那么从 (1.13) 可推导出
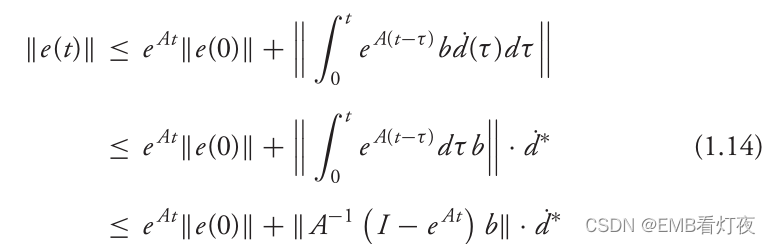
对不等式(1.6)的两边取极限,得到

由式(1.15)得出积分控制只能消除由恒定扰动引起的偏移。 然而,在存在非恒定扰动的情况下,积分控制可能会导致稳态跟踪误差。 还注意到(1.4)中的积分作用总是会导致不希望的瞬态控制性能,例如较大的过冲和较长的稳定时间。
* 仿真验证
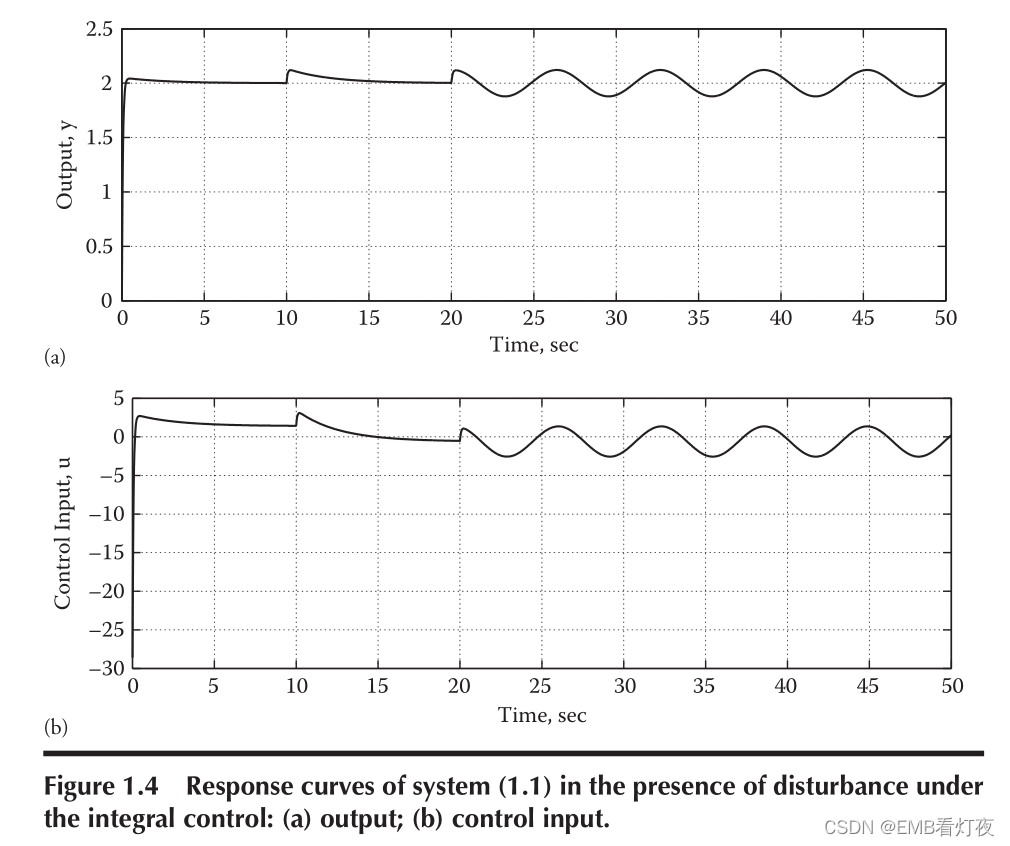
如图 1.4(a) 所示,积分控制会导致过冲或暂态跟踪过程产生额外的稳定时间。 在存在恒定扰动的情况下,积分控制可以消除跟踪误差的偏移。 然而,如图 1.4(a) 所示,积分控制无法抑制谐波扰动。该模拟场景演示的结果表明,积分控制方法的抗扰和跟踪性能之间存在矛盾。 总结,积分控制可以有效地抑制恒定扰动,但在存在时变扰动(如谐波扰动)时效果不佳。
2.3 基于干扰观测器的控制 Disturbance Observer-Based Control
正如2.1和2.2节所讨论的,高增益控制和积分控制可以被认为是一种 被动抗干扰控制方法(PADC )。 与 高增益控制 和 积分控制 方法不同,基于扰动观测器的控制(DOBC)提供了一种主动有效的方法来处理扰动并提高闭环系统的鲁棒性,因此DOBC被认为是一种主动抗干扰控制方法(AADC)。 DOBC 法通常设计为

其中 k 是反馈控制增益, 是扰动观测器的扰动估计。
是扰动观测器的扰动估计。
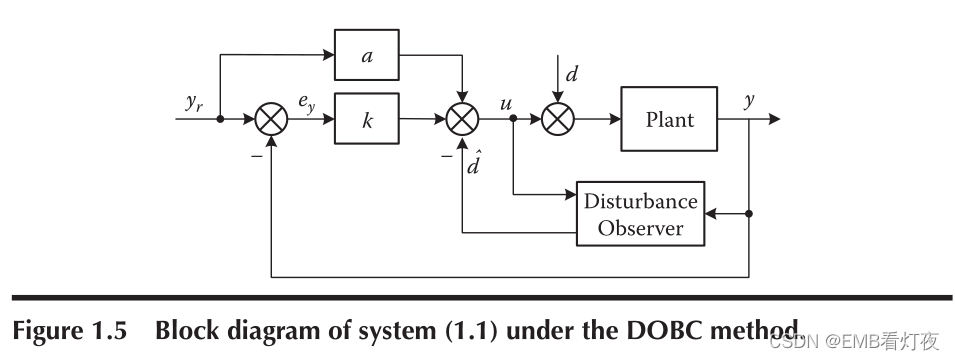
DOBC(1.16)下的闭环系统(1.1)框图如图1.5所示。 将控制律 (1.16) 代入跟踪误差系统 (1.2) 得到

其中 是扰动估计误差。 通过设计一个合适的扰动观测器,扰动估计误差 e_d 通常可以由下式控制
是扰动估计误差。 通过设计一个合适的扰动观测器,扰动估计误差 e_d 通常可以由下式控制

上式必须是全局渐近稳定的,才符合设计要求。函数 f(e_d)则是需要根据自己控制的系统自行设计。
由动态跟踪误差 (1.17) 和动态观测误差 (1.18) 组成的闭环系统可以被视为级联系统。 从稳定性判别准则可以看出,如果控制增益设计满足 a + k > 0,则级联系统是渐近稳定的。这意味着最终可以渐近地抑制扰动。 与积分控制方法相比,DOBC 不仅可以补偿恒定扰动,还可以补偿许多其他类型的扰动,例如谐波扰动,只要扰动观测器能够准确估计即可。
* 仿真验证
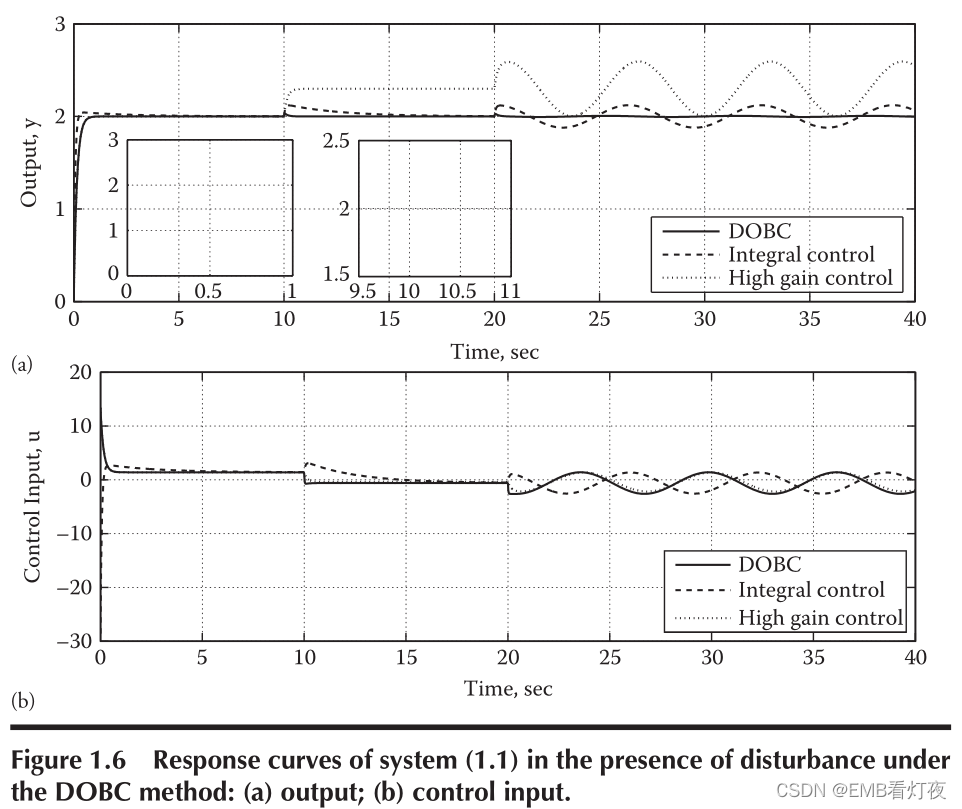
上面的推导中已经进行了系统(1.1)在 DOBC 方法下的模拟研究,以评估其在抗扰方面的有效性。 系统(1.1)的参数 a 取与前面的模拟场景相同,即 a = 0.7。 参考信号仍被视为阶跃 y r (t) = 2。在 t = 10 sec 对系统施加阶跃扰动 d(t) = 2,谐波扰动 d(t) = 2 + 2sin( t) 在 t = 20 秒时施加在系统上。 DOBC的反馈控制参数选择为k = 6。扰动观测器用于及时估计此类扰动。 为了展示DOBC方法在抗扰方面的优越性,这里采用比例控制和积分控制两种方法进行比较研究。 比例控制的控制增益选择与DOBC方法相同。积分控制的控制参数选择为k_0 = 6 和 k_1 = 15。输出和输入响应曲线分别如 图1.6(a)和(b)所示。
如图 1.6(a) 所示,DOBC 方法与比例控制和积分控制方法相比,可以更迅速地抑制恒定和谐波干扰,并且不需要过多的控制量来抑制干扰。 此外,从图 1.6 可以看出,DOBC 方法下的响应曲线与基础比例控制方法下的响应曲线重叠,称为标称性能恢复。 其原因在于基于扰动观测器的补偿就像基础比例控制的补偿一样, 若没有外部扰动,则扰动观测器仅输出零扰动估计值,使得DOBC 方法的控制输出与基础比例调节方法的控制输出相同。 在这种情况下,不需要过多的瞬态性能或控制量来抵抗外界干扰。 一般来说,DOBC 可以在不影响标称性能的情况下实现良好的抗扰性能。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)