资料
路网文件:
https://blog.csdn.net/qilie_32/article/details/127201612
路由文件:
https://blog.csdn.net/weixin_43797015/article/details/122023038?spm=1001.2101.3001.6650.1&utm_medium=distribute.pc_relevant.none-task-blog-2%7Edefault%7ECTRLIST%7ERate-1-122023038-blog-122074936.pc_relevant_3mothn_strategy_recovery&depth_1-utm_source=distribute.pc_relevant.none-task-blog-2%7Edefault%7ECTRLIST%7ERate-1-122023038-blog-122074936.pc_relevant_3mothn_strategy_recovery&utm_relevant_index=2
https://blog.csdn.net/qq_41945572/article/details/122074936
一、创建路网文件
1、手动创建路网文件
使用sumo的NETEDIT,其有的工作模式如下:
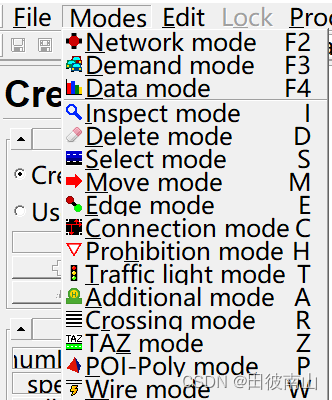
(1)创建点和边
A.选择Edge mode,按出不同的点和边,注意这里的距离近的点会归于一个。
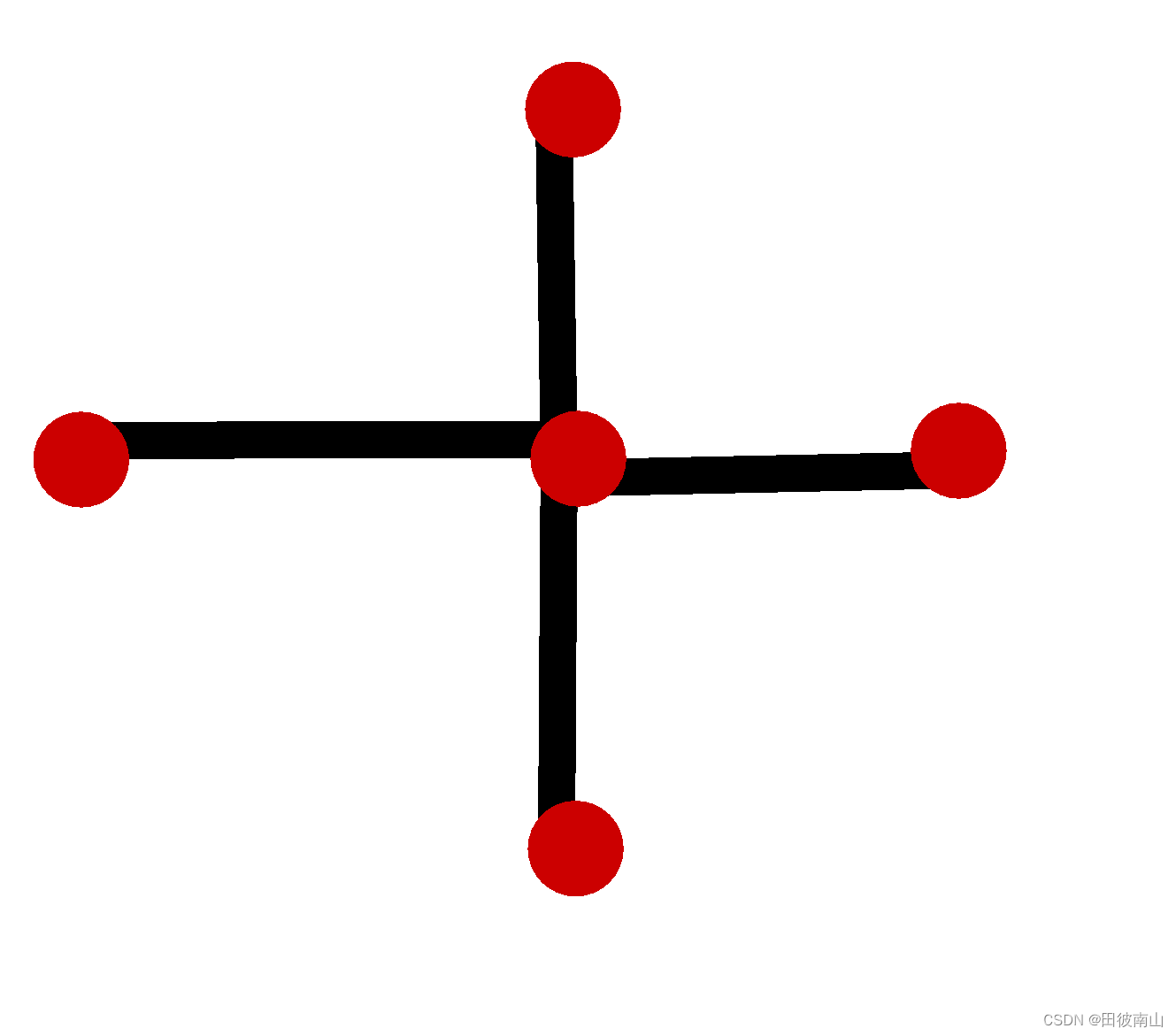
选择inspect mode,可以设置点的位置和id等参数。
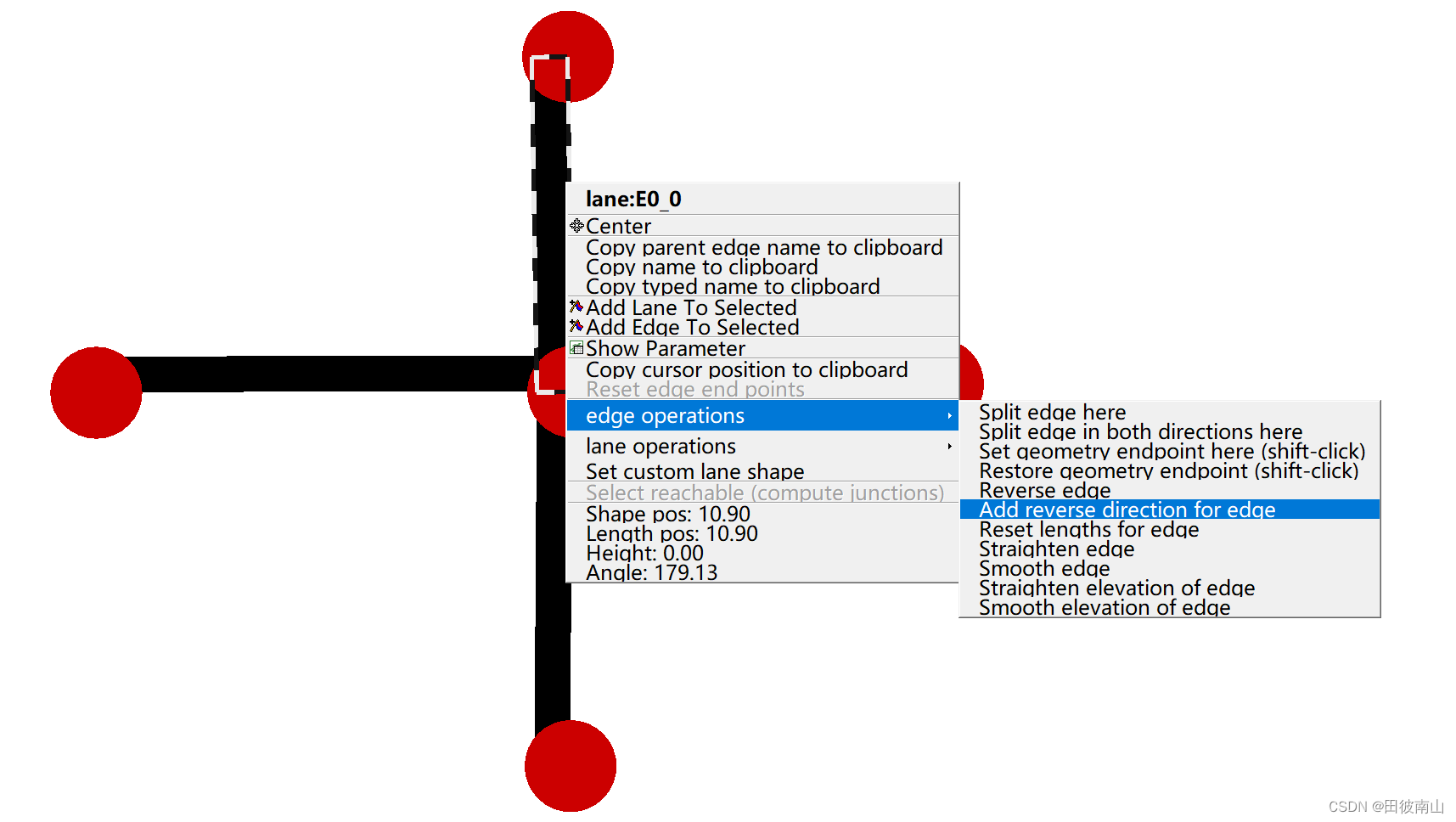
(2)设置道路
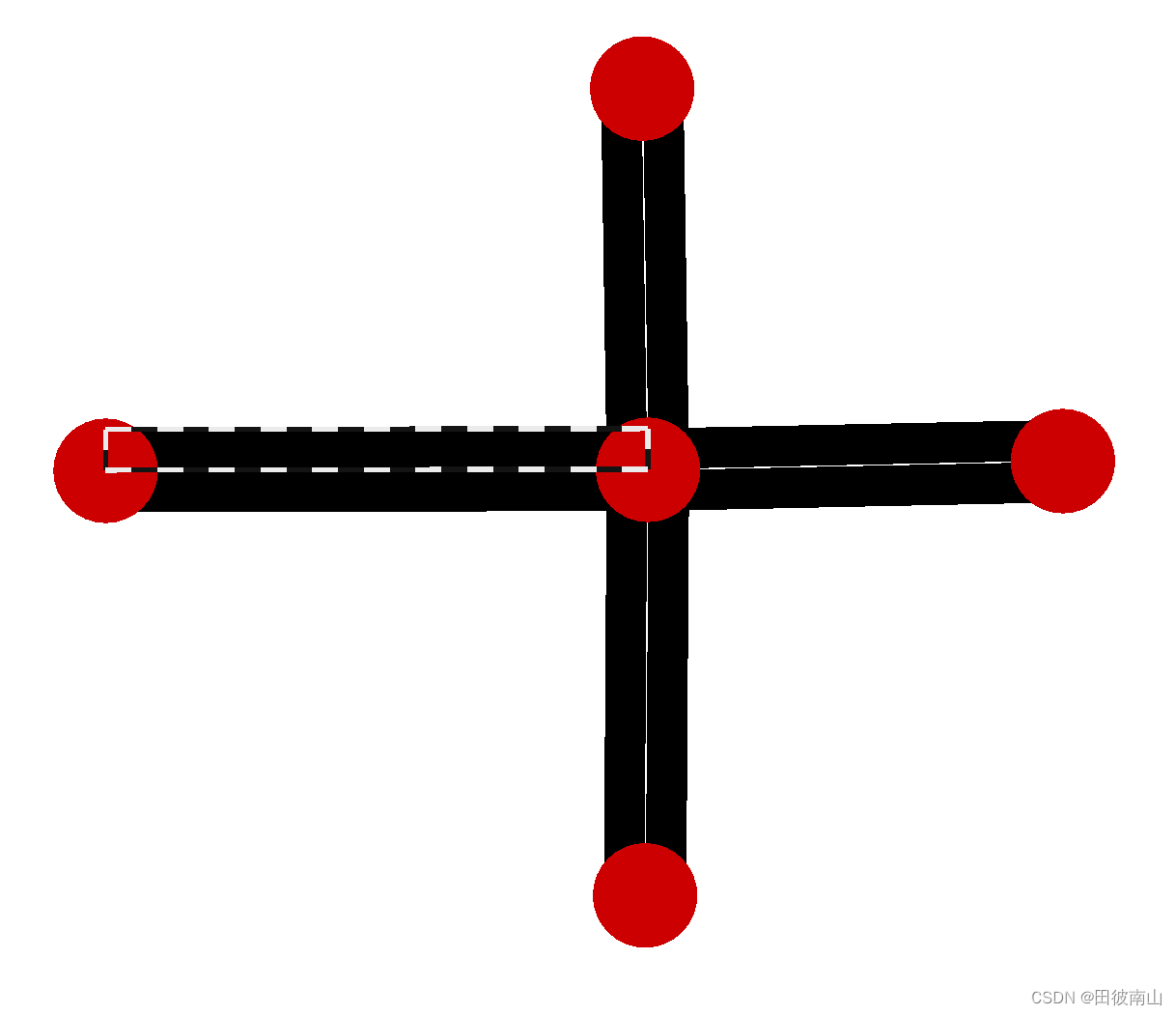
A.增加反向边
选择inspect mode,左键选择一条边,右键增加反向边。
B.保存net.xml文件
C.增加车道
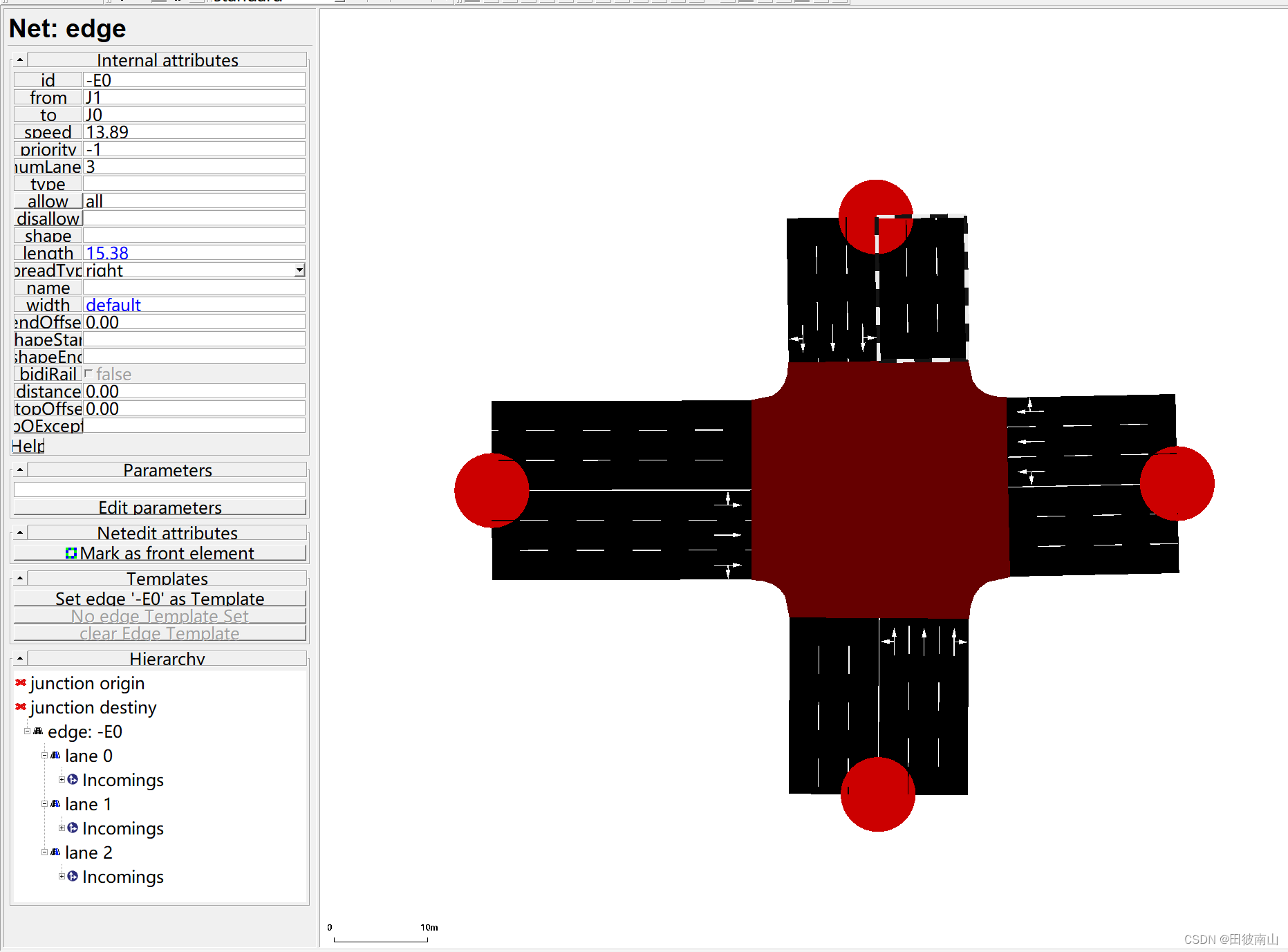
D.修改选择模式
修改select edges or lanes,可以选择单条车道
(3)设置十字路口
A.选择connect mode c
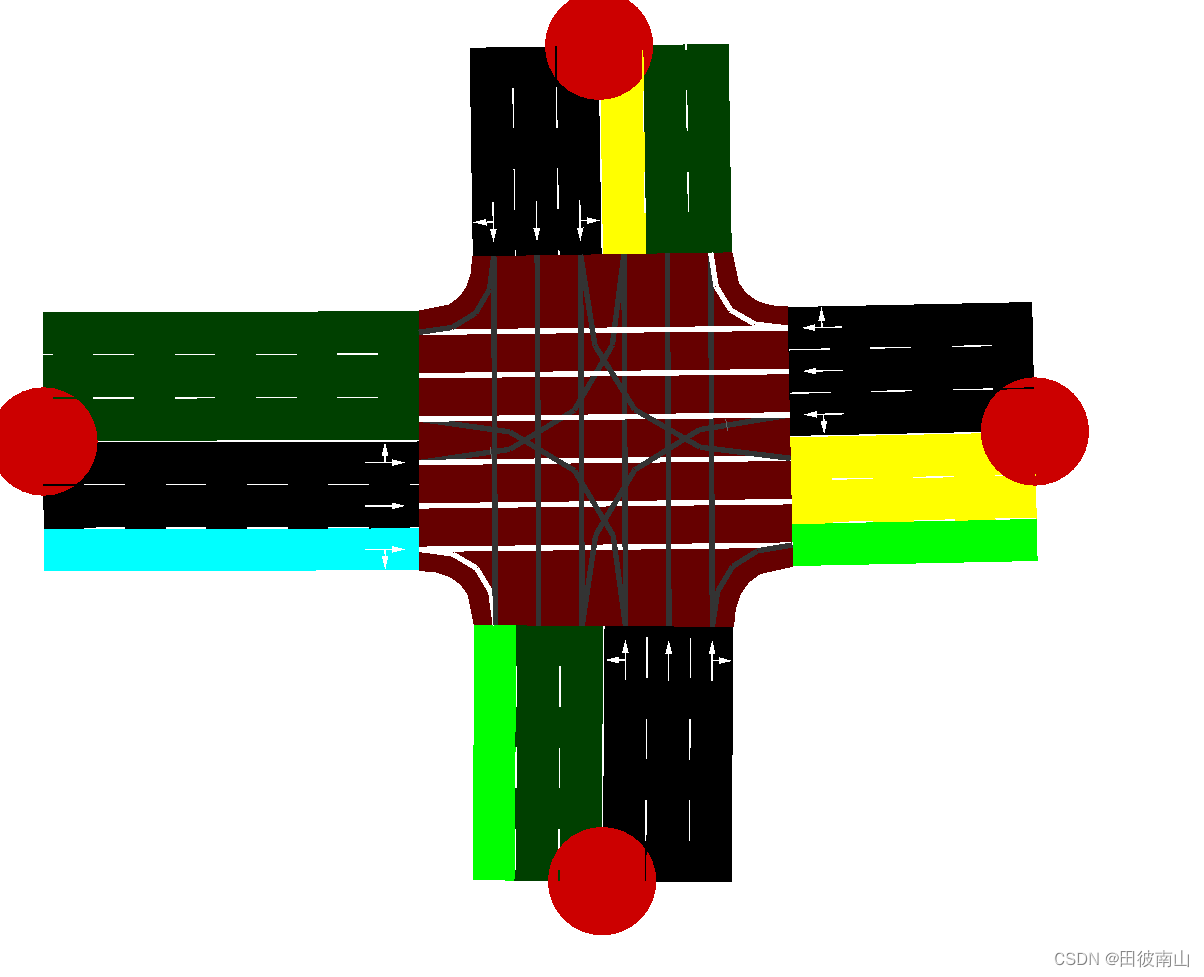
蓝色:选择的车道
浅绿:可以到达的车道
深绿:规则允许但没有设置到达权限的车道
黄色:冲突的车道
(4)增加红绿灯
A.创建红绿灯
选择Set traffic light mode,选择路口,点creat
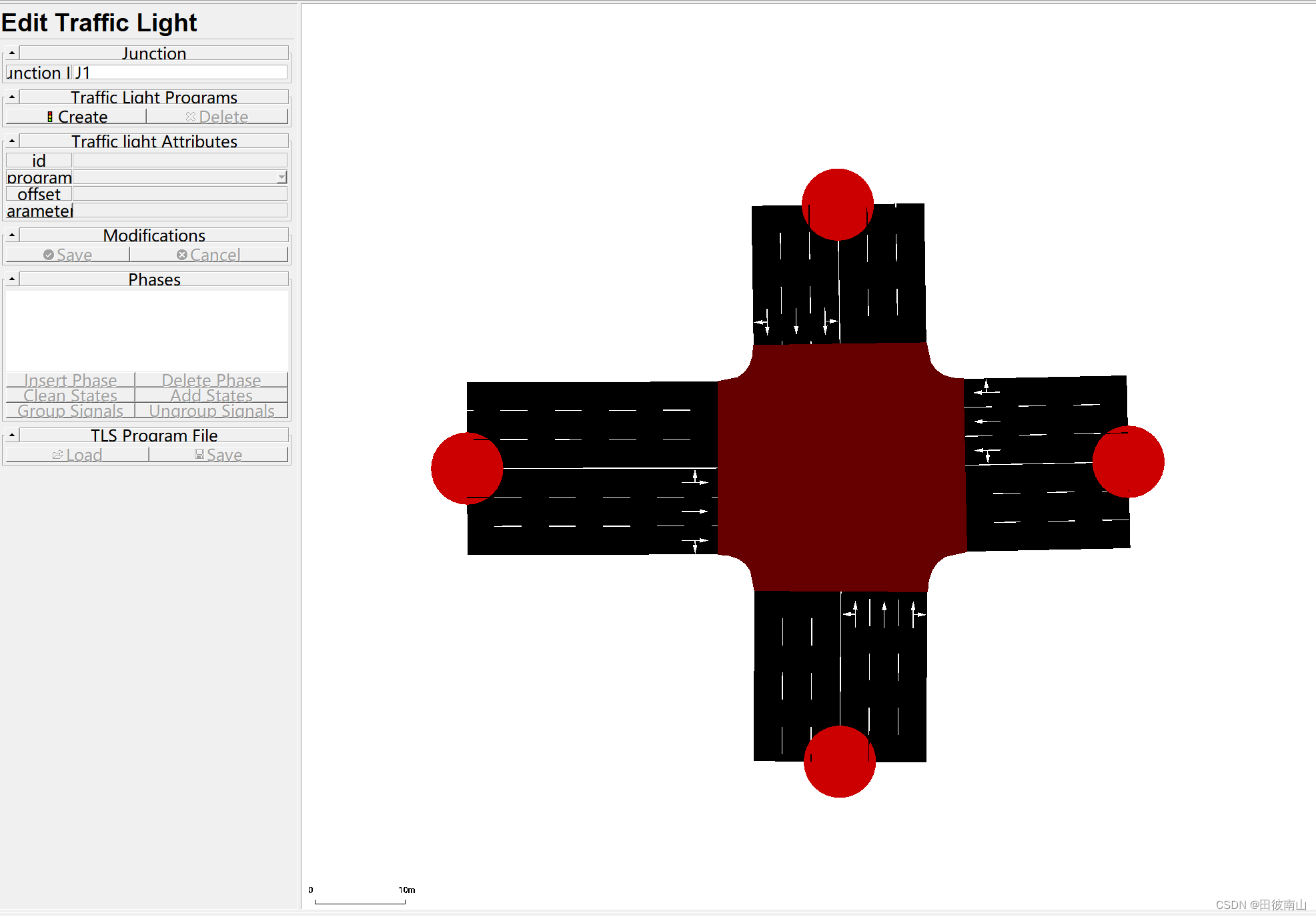
B.设置红绿灯
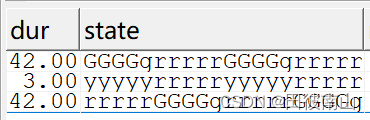
dur是当前状态持续时间,state是这一状态的信号灯状态
(5)其他
还可以增加人行横道、公交车站等,用法直接,不再赘述
2、自动创建路网文件
(1)导入osm
netconvert --osm-files OSM文件路径 -o 路网存储路径
二、创建路由文件
1、设置车辆类型
(1)例子
<vType id="type1" accel="0.8" decel="4.5" sigma="0.5" length="5" maxSpeed="70"/>
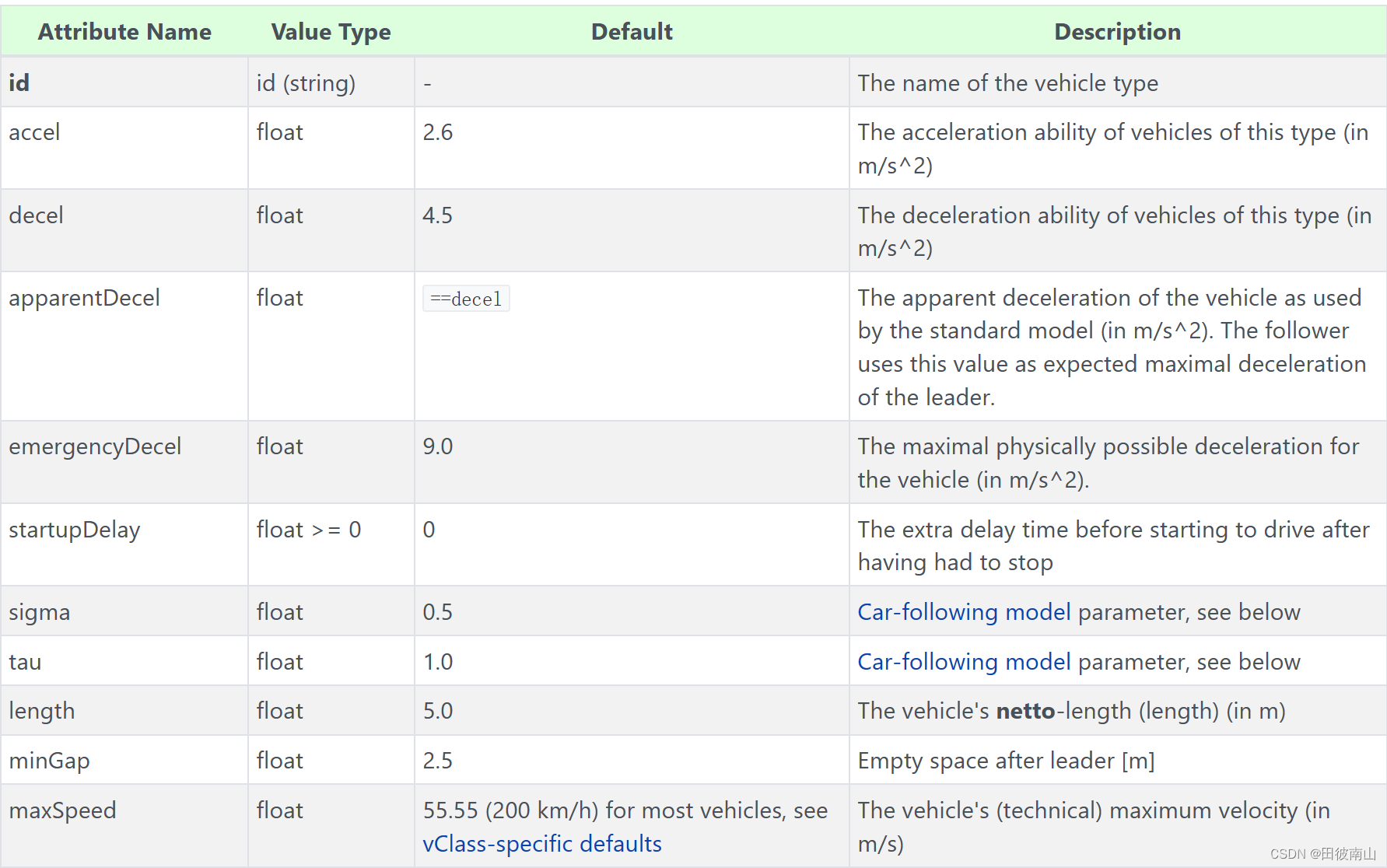
(2)基本参数
id:车辆类型名字
accel:加速度
decel:减速度
sigma:跟车模型,代表驾驶的完美程度
length:长度
width:宽度
maxspeed:最大速度
(3)完整参数文档
链接:https://sumo.dlr.de/docs/Definition_of_Vehicles,_Vehicle_Types,_and_Routes.html#available_vtype_attributes
2、设置运行路线和车流
1、例子
<route id="edge1_1" edges="edg0 edg0.1 edg1 edg2 edg3 edg4 edg5 edg6" />
<flow id="1" type="typedist1" route="edge1_1" begin="0" end="3600" vehsPerHour="6500" departPos="1.0" departLane="best" departSpeed="27" />
2、基本参数
(1)route
id:路线名
edges:道路边先后顺序
(2)flow
id:车流名
type:用于此车流的车辆类型的 ID。
route:车辆应沿的路线的 ID
begin:首辆车出发时间
end:出发后停止的时间间隔
vehsPerHour:每小时等距车流量
departPos:确定尝试插入车辆的所选出发车道上的位置;
departLane:确定尝试插入车辆的车道;
departSpeed:确定插入时的车速
3、完整参数文档
链接:https://sumo.dlr.de/docs/Definition_of_Vehicles,_Vehicle_Types,_and_Routes.html#a_vehicles_depart_and_arrival_parameter
3、完整内容(测试)
<?xml version="1.0" encoding="utf-8"?>
<routes xmlns:xsd="http://www.w3.org/2001/XMLSchema" xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance">
<vType id="type1" accel="0.8" decel="4.5" sigma="0.5" length="5" maxSpeed="70"/>
<vehicle id="0" type="type1" depart="0" color="1,0,0">
<route edges="-E4 E3"/>
</vehicle>
</routes>
三、创建仿真文件
<configuration>
<input>
<net-file value="road_test.net.xml"/>
<route-files value="road_test.rou.xml"/>
</input>
<time>
<begin value="0"/>
<end value="10000"/>
</time>
</configuration>
四、运行仿真
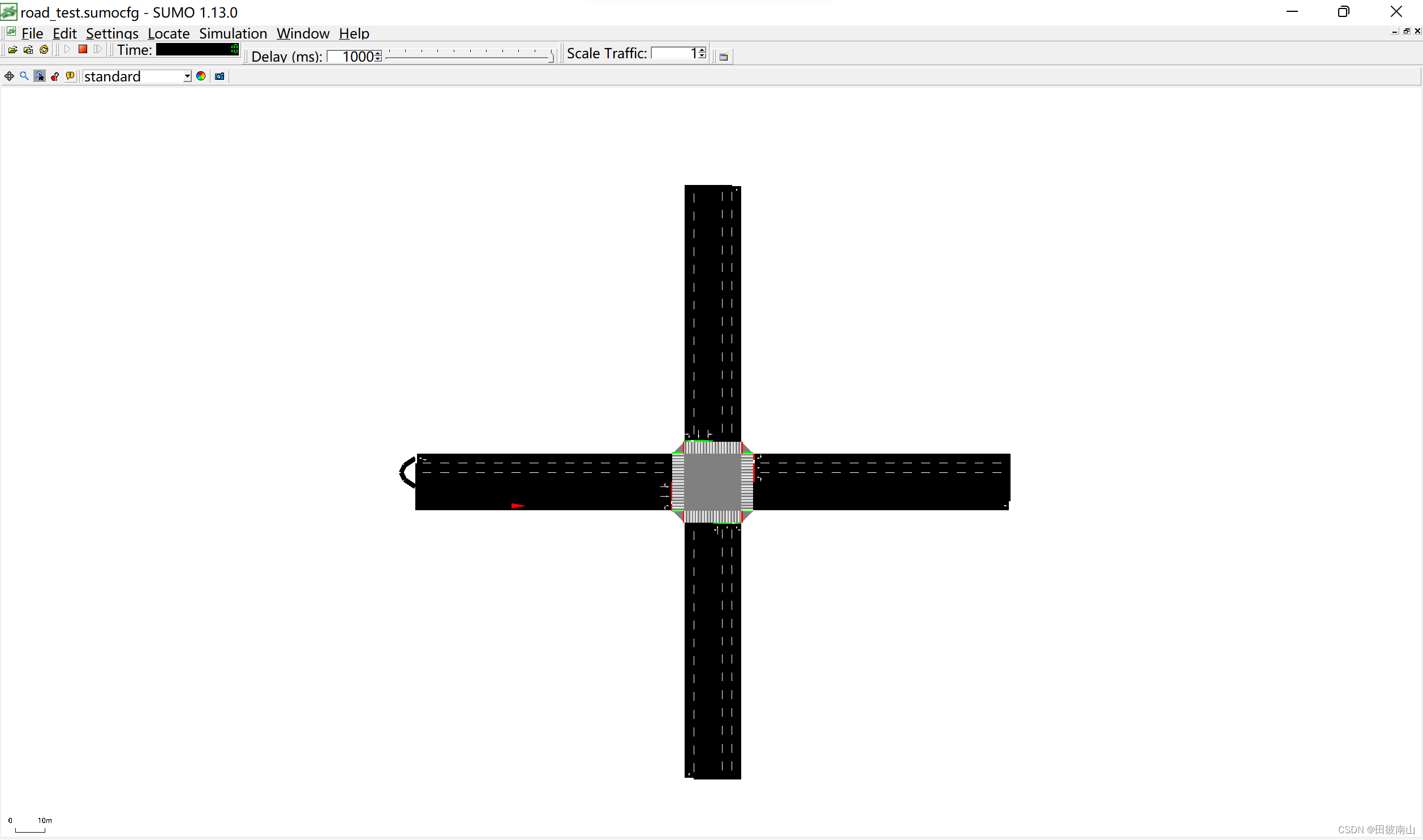
·打开仿真文件,按下播放键即可。
·关键是delay的设置,delay就是仿真的速度,即每走一步花多少实际时间。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)