上文连接:F450+PixHawk 2.4.8 无人机安装(一)
笔者上文写到了安装完成电调,机体的安装, 本文将承接上文继续。
PixHawk 2.4.8配套有一个减震支架, 减震支架的下固定板需要固定到机架的上中心板上,上下固定板需要通过减震胶垫连接起来。Pix 飞控粘贴到上固定板上, 下减震支架可以通过双面胶与上中心板连接,但是为了日后拆卸方便, 笔者决定用螺丝固定。本身的下减震固定板的螺丝孔不适宜“X”构型, 于是我们可以手动对下减震固定板做打孔改造。


改造好的下减震固定板就可以与上减震固定板组合起来。组装好如下图


然后就可以像下图这样安装到上中心板上了。中心板和减震支架板都是M3型号的螺丝孔, 笔者用了M3的六棱柱螺丝架高了飞控的安装位置。可以参看下图效果。


至此, 硬件部分的安装就以及安装完毕了, 接下来我们需要做的是调整飞控的内容。
笔者采用的飞控是PixHawk 2.4.8, 选用这款的原因主要是准备日后做二次开发。这里我们要做的第一步是使得无人机起飞, 起飞之前需要对无人机的飞控做校准调试。 这里给大家介绍一款店家推荐给笔者的软件, MissionPlanner 官网 可以下载到各个版本的MissionPlanner, Mission Planner是一款由ArduPilot开源的功能全面的自动驾驶仪项目的地面站应用程序。从其官网的描述中,我们可以看出它可以做到以下功能:
- 使用Google Maps/Bing/Open street Maps/Custom WMS 等点击航路点输入规划航线。
- 从下拉菜单中选择任务命令
- 下载任务日志文件并进行分析
- 为您的机身配置APM/PixHawk设置
- 连接PC飞行模拟器接口,创建出半实物无人机模拟器。
- 查看APM/PixHawk串行终端的输出
具体软件安装在此就不做赘述。笔者也是趟了不少坑, 后来重新做了一次系统, 才完成安装。在初始设置中可以对无人机做最初状态的调试。


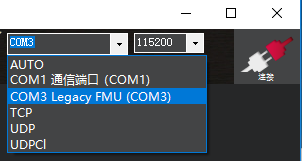
安装好Mission Planner 后,选择右上角下拉中的对应端口, 设置端口值点击连接, 就可以将PixHawk 飞控同MissionPlanner 连接起来了。连接好后, 水平陀螺仪的状态就会同PixHawk 保持一致。
好了, 今天先讲到这里, MissionPlanner与飞控的具体调试方法笔者会在下次博文中介绍给大家, 敬请期待。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)