GCAN -212(R2)
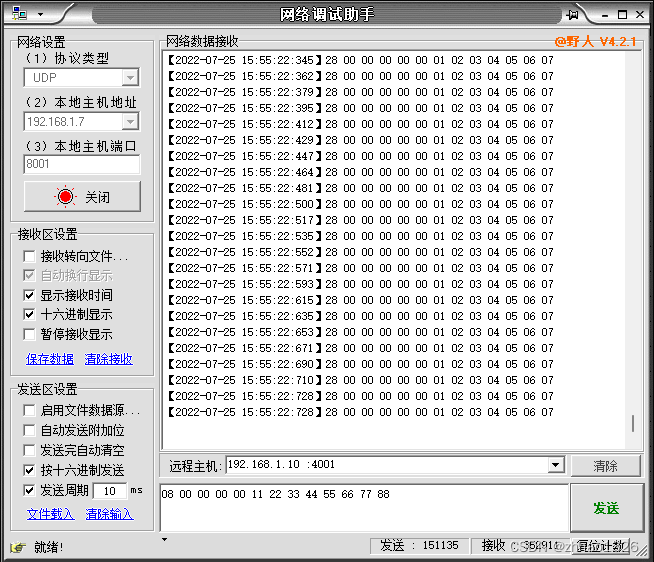
使用udp模式
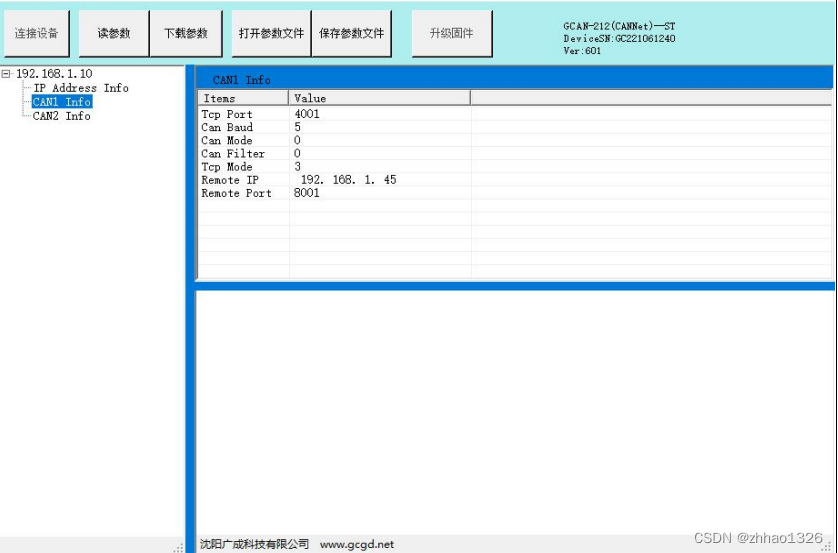
在配置软件进行配置
- 选择udp模式;
- 选择Remote IP 为本机PC的IP地址;
编写ROS程序
未完成
参考程序1
参考程序2
节点数据驱动:
- 主线程udp接收数据,解析并使用can_msgs::Frame类型 发布话题receive_message;
- 回调函数:订阅 can_msgs::Frame 类型 send_message话题,并使用udp进行发送;
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)