1、写在前面
随着电动汽车的热火,关于FOC控制技术的文章这几年在网络上可谓是一搜一大把,各种理论分析,公式推导,应有尽有。通过这些文章,可以看出大佬还是很多的。另外也有FOC的开源硬件。而在大几年前,第一次做这种项目的时候,想找个开源硬件参考下代码,搜遍了全球最大的同性交友网站(github),也没有找到。只找到一些开环的VF控制的。
而大几年前关于FOC控制技术,是各个芯片公司的独家秘笈。一般是不外传的,只对合作方开放。比如TI的电机控制库,ST的motor control workbench3.0 4.0啥的,英飞凌也有,现在想不起来是什么了,特别是ST的库,以及ST举办的开发者技术交流论坛,流传的一个PPT,是众多电机开发者入门的宝典,包括我个人。在此也要感谢ST,现在用的国产芯片,他们电机库我看了一遍,有一种直觉,这就是ST的复刻版啊。
再写一篇理论性的文章,我个人觉得完全没有必要,一方面是网络上确实是太多了,多我一篇不多,少我一篇不少。另一方面,写这种文章比较耗费精力,画图,列公式,推导,写这种理论文章的意义就是自己再复习一遍。所以这里就不写了。就把一些优质资源列出来供大家参考,意义更大一些。
ABC是电机的三相,Q是力矩,D是磁链。
2、FOC的一些概念
2.1、BLDC和PMSM
关于电机,很多人开始的时候容易搞混BLDC和PMSM的概念,本质上这两种电机其实从结构形式上是一样的。唯一的区别是转子上的磁钢,一个是方波一个是正弦波。再准确点的讲,BLDC一般是用多块磁钢贴在转子上,这就导致了磁场是不连续的,形成了方波磁场。而PMSM的转子磁钢是一个整体圆环,充磁的时候径向正弦波充磁,充出我们需要的极对数。下图这种就是典型的BLDC。
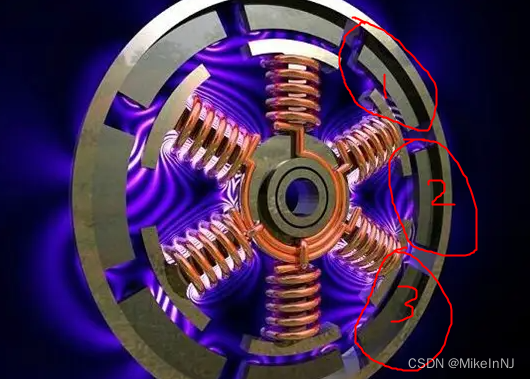
大家看了很多文章,知道PMSM的转矩波动小,BLDC的转矩波动大。而决定这个转矩波动的就是充磁方式和磁钢安装方式决定的。通过几种方式我们可以轻易的分别这两种电机。一个是用手去转转子,感受齿槽效应,很小,甚至感受不到的一般都是PMSM,最稳妥的办法就是直接拿示波器测量旋转反电动势。反电动势波形是正弦波的就是PMSM,方波的就是BLDC。
FOC是一种矢量控制算法,这两种电机都可以控制,从我的实践看来,BLDC转起来会有轻微顿感,而PMSM是非常顺滑的。
2.2、控制流程
2.2.1 、从有刷电机到六步换向到FOC
我们知道一个直流有刷电机,给他通一个电他就开始转起来了,电压越高转的越快。小时候拆过玩具里面马达的都可以看到,这种电机后面是有一个碳刷换向器的,当然了,我们拆的那种就是两个铁片,没有碳刷。其实我们这种控制方式就是电流控制。如果用PWM调制一个电压来控制有刷直流电机,就可以轻松的改变电机旋转速度。
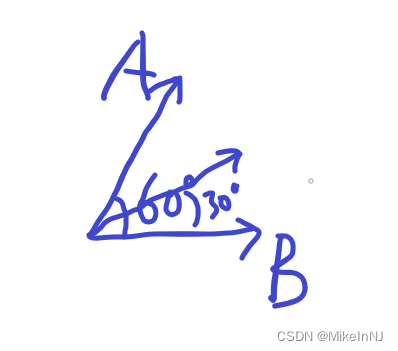
而三根线的这种无刷电机,直接这样通电,电机是不会转的,你给其中两根线通电,电机会卡死在某一个位置。你如果不断电的话,电机就会发热,最后可能烧毁。这个时候你再换两根线通电,电机会卡在另外一个位子,你再换两根线,电机又换一个位子,你如果速度足够快的去换着通电,电机就会按照你这个足够快的速度转起来,这就是6步换向控制。这是几年前大多数BLDC的控制方式。而实际控制过程中换向点需要比较准确,所以还要检测反向电动势过了中点。如果这个电机是一对级的,换一次相,那么电机走60度,六步换向刚好360度。那么在这个60度之间,我如果想让电机走15度或者走5度怎么办呢。通过六步换向这种方式明显是做不到了,这个时候我们就要用FOC控制了。FOC的中文翻译就是磁场向量控制。我们用一个很浅显的方式来理解他。如下图所示,如果A使出全部的力量,那么转子就转到A的位置,B使出全部力量,那么转子就靠在B的位子,如果A使出一半的力,B使出一半的力,那么转子就停在A和B的中间。这就好比,小A和小B一起追求小D,假设小D的人品有问题,小A发力的时候,小D就靠近小A,小B发力的时候,小D就靠近小B,而小A和小B一起发力,且势均力敌,小D就游走中间。这样的话,控制好小A和小B的发力尺度,通过三角函数,我们就能算出小D游走在哪个位子。如果小D走到了小B和小C的区间,那么小D就会受到小B和小C的拉扯了。这就是FOC控制的精髓。这样的话,我们就可以控制转子运动到任何一个地方了。
2.2.2、如何做到FOC
如何轻松控制小A和小B的发力程度呢,电机三根线,究竟该如何控制呢。上世纪七十年代,西门子公司的工程师Blaschke发表了一篇论文,如下所示:
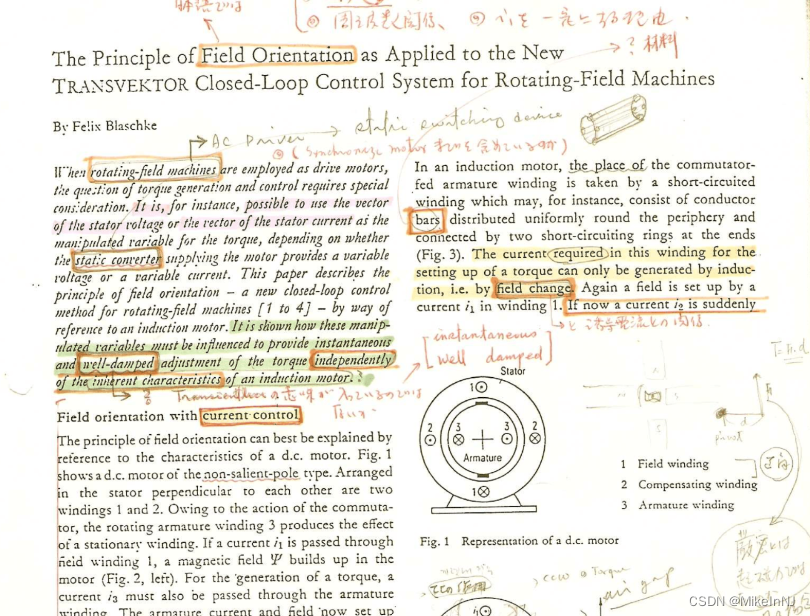
巧妙的把三根电机线的控制等效成类似于有刷电机的两根线控制。那么具体是如何等效的,其实初中的知识就可以做到了。就是一个clark变换。如下图所示,Ia,Ib,Ic转换到α和β的直角坐标系。
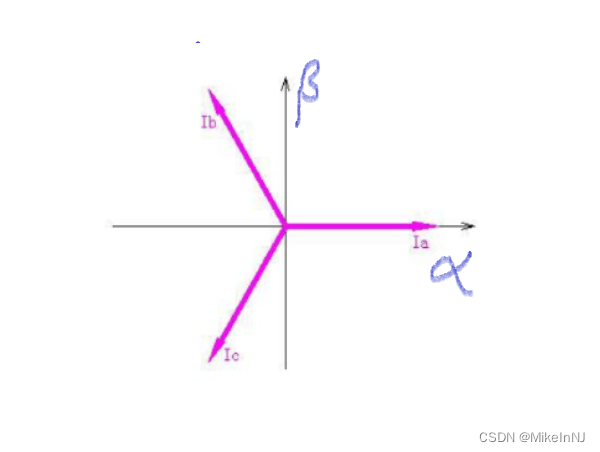
Iα 等于Ia减去Ib和Ic在α轴上的分量,Ib乘以cosθ就是Ib在阿尔法轴上的投影。所以:
I
α
=
I
a
−
c
o
s
θ
∗
I
b
−
c
o
s
θ
∗
I
c
Iα = Ia - cosθ*Ib - cosθ*Ic
Iα=Ia−cosθ∗Ib−cosθ∗Ic
而θ很明显是60度。同理可以得到:
I
β
=
s
i
n
θ
∗
I
b
−
s
i
n
θ
∗
I
c
Iβ = sinθ*Ib-sinθ*Ic
Iβ=sinθ∗Ib−sinθ∗Ic
写成矩阵形式就是:
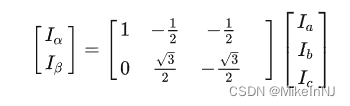
为什么要写成矩阵形式?是不是有病,装高深,其实并不是,因为转成两个控制量,是方便了我们进行控制,但是最后还是要去控制实实在在的三根线啊,所以最后还要再转回去。一个向量乘以一个矩阵变成另一个向量,那么再变回去,我们就用另一个向量乘以这个向量的逆矩阵(线性代数)。这样就不用我们再傻不拉几的反着推导了。现在这个αβ坐标系是个静止的,我们要让他转起来,所以我们要把他变成旋转的坐标DQ坐标。如下图(借用了稚晖君的图,参考文献会给出稚晖君的链接)所示,如何旋转呢,三角函数大法继续,这个转换就是park变换。
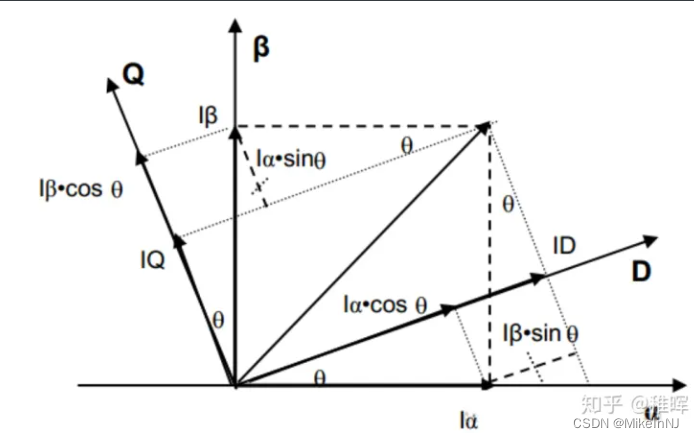
公式如下:
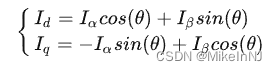
这个θ角度,可以通过编码器得到,或者反电动势估算,所以,这个θ角其实是已知的。这个时候,我们发现只要我们给Id和Iq一个值,然后给一个θ角度,然后反park变换,是不是我们就可以得到Ia,Ib,Ic三个控制量的值了。这就是FOC控制的核心思想和核心公式。
2.2.3、到底如何控制那三根线
看看FOC的经典控制过程图:
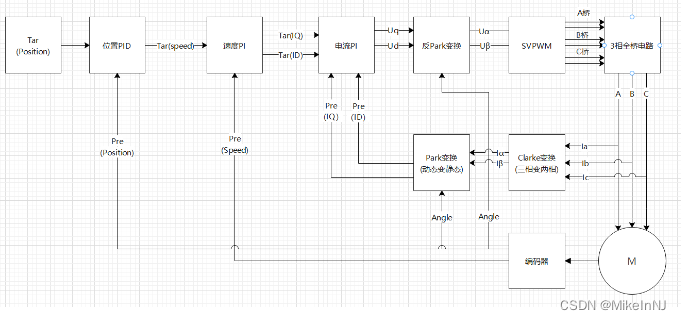
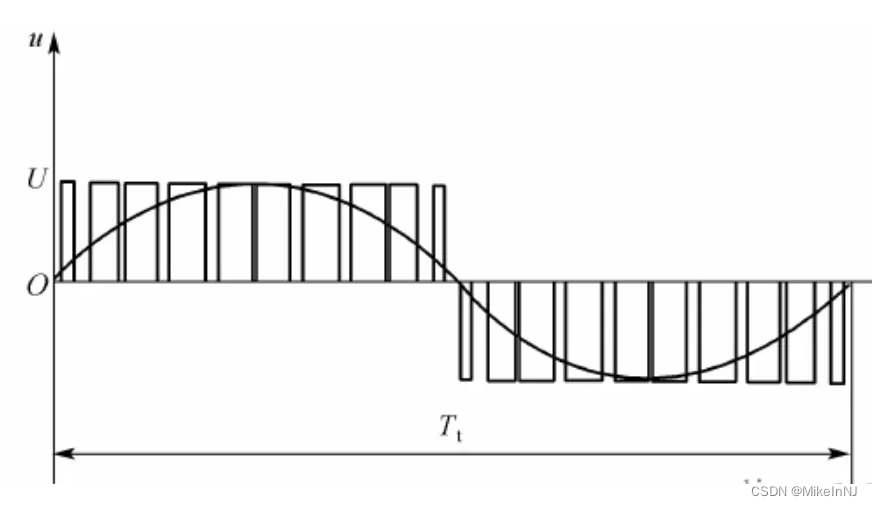
我们可以看到后面有一个SVPWM,这是个什么东西,其实这个SVPWM,是一个反clark变换器,同时也是一个pwm的调制器,先了解下pwm调制,占空比大,电压就大,占空比小电压就小。如下图所示,通过调节PWM的占空比,我们是不是就可以得到一个正弦波。你用示波器去测量电机的三个线,你会发现,里面其实就是这种波形。当然了,没有负半轴,这里的负半轴是为了方便理解。
为了方便理解,我们取某一个时刻来看,这个时刻ABC三根线的电压是不变的,也就是小A和小B还有小C,他们之间的发力关系是不变的,这个时候小Q在那个θ角的位置。我们现在要让小Q在360°均匀游走,雨露均沾,我们就给Iq一个值,并且把对应的θ角实时的反馈到变换公式里,这样,小Q就会转起来。我们给的这个Iq值越大,小Q就转的越快。
SVPWM一句话来概括,就是根据Uα,Uβ(电流到电压是线性的)产生脉宽调制波形送给电机,而小A和小B具体发力的多少,其实是用时间来划分的,在单位时间内,小A作用时间长,那么小A做的功就多,伏秒平衡原则。具体参考下面这篇文章。涉及到互补性PWM,全桥控制电路等。
https://zhuanlan.zhihu.com/p/414721065
2.2.4、总结
到这里,大概了解了FOC是怎么一回事,明白了做这个算法的目的。更多的理论知识可以参考下面的文档。
https://zhuanlan.zhihu.com/p/147659820
稚晖君深入浅出,讲的非常清楚。
https://zhuanlan.zhihu.com/p/364247816
一只臭皮球,这个网页也讲的很全面,同事在网上进行检索,还有很多相关的文章。
3、写在后面
理论知识过一遍,肯定还是模模糊糊的,毕竟理论要结合实际,在实际调试的过程中,你可能会碰到电机不转,发热,电流采样噪声大,电机转起来里面滋滋响,电压总线上谐波很大,电机转起来不均匀、载波频率上不去、控制范围越界等各种问题。有问题是好事,弄清楚一个问题,你对FOC的理解就会又深入了一点。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)