jetson tx2 刷机,安装 cuda 、opencv 详细教程
jetson tx2 的详细介绍和用途可见官网:Nvidia jetson tx2. 接下来主要说明jetson tx2 详细刷机过程以及在过程中踩过的坑。
1: 准备
-
1台装有 Ubuntu 18.04 系统的主机 (Windows 也可,但本教程是基于 Ubuntu 操作系统);
-
Jetson tx2 板载电脑(标配 USB 线);
-
局域网络:如果Jetson tx2 能够进入打开的话,将 Jetson tx2 和 另一台 装有 Ubuntu系统的主机连在同一局域网;
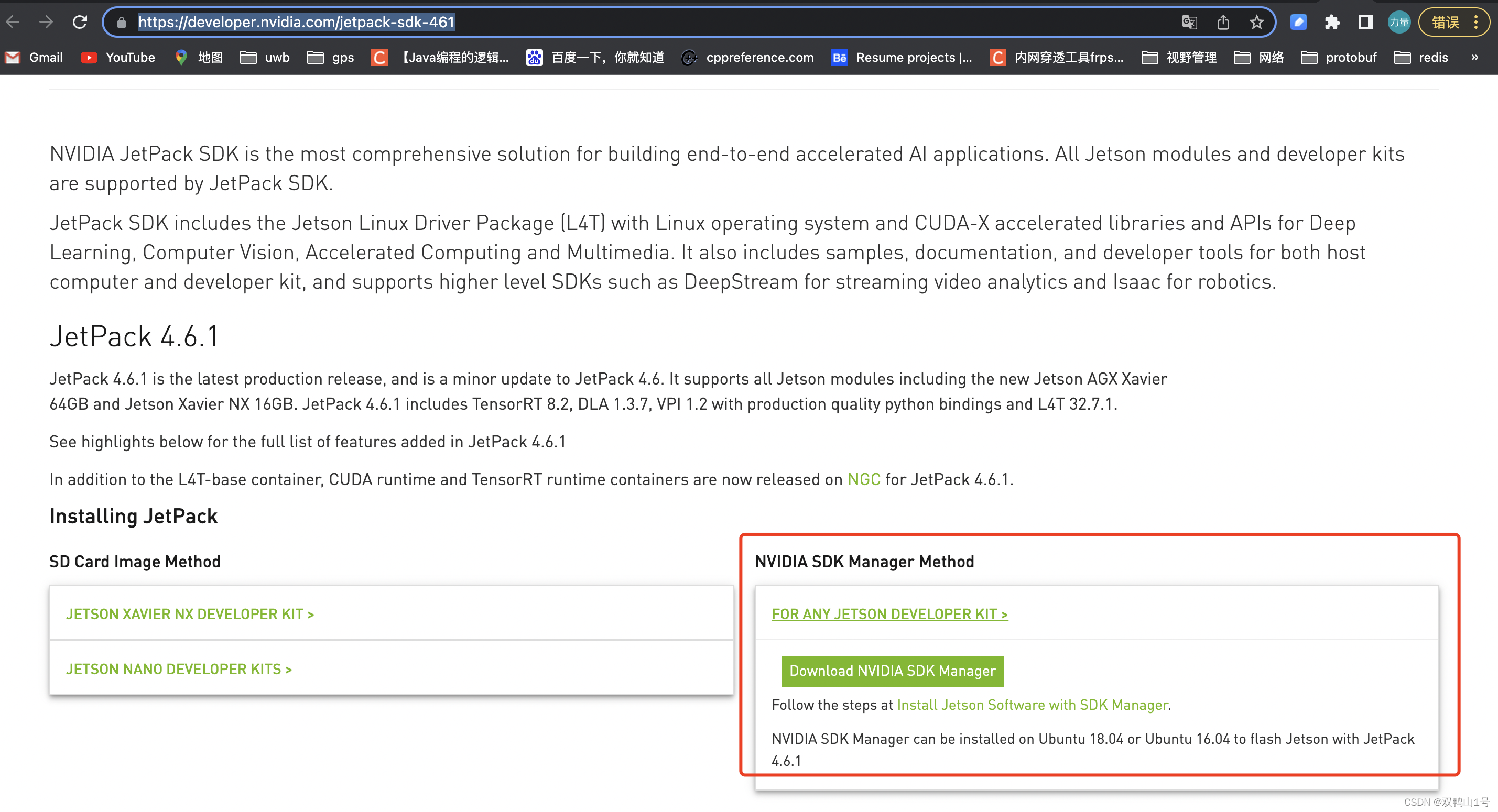
2: 主机下载、安装 JetPack SDK
NVIDIA JetPack SDK 是构建端到端加速 AI 应用程序的最全面的解决方案。所有 Jetson 模块和开发工具包都由JetPack SDK支持。JetPack SDK 包括 Jetson Linux 驱动包(L4T)与 Linux 操作系统和 CUDA-X 加速库和 api,用于深度学习,计算机视觉,加速计算和多媒体。
JetPack 4.6.1 链接
3: 刷机
官网教程
上面给的是官网的教程,下面我再详细说明下自己的刷机过程以及踩过的坑。
-
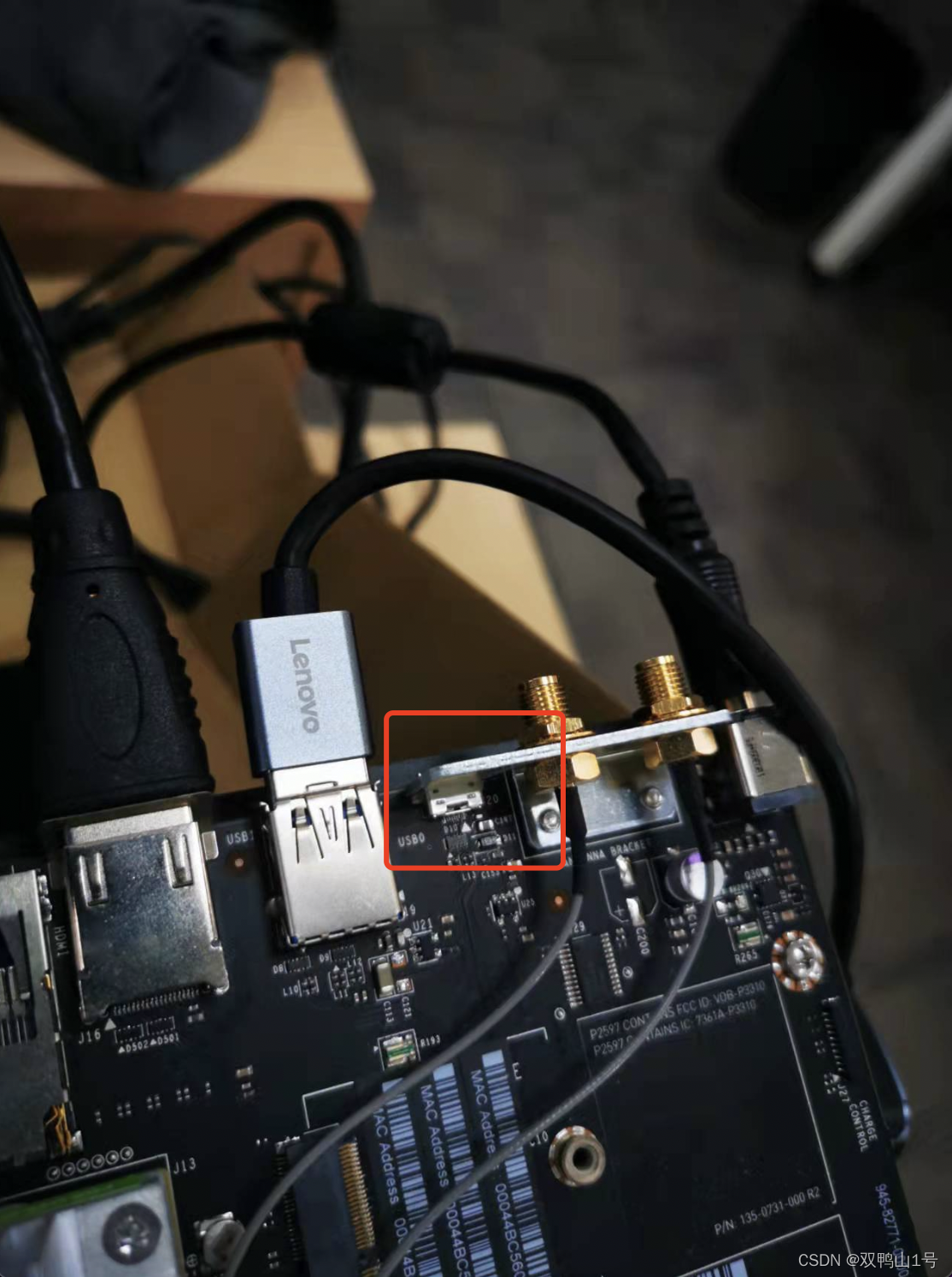
使用 USB 线将 主机和 jetson tx2 连接,用于传输下载的镜像文件和 cuda 等插件;jetson tx2 上 USB 线接在 USB0接口。‼️ 此处一定要注意轻插轻拔,这个接口是粘上去的,非常容易脱落。(不要问我怎么知道的…)‼️
-
将 jetson tx2 进入 RECOVERY 模式 (如果失败,多试几次,或者检查 usb0 插口是否脱落):
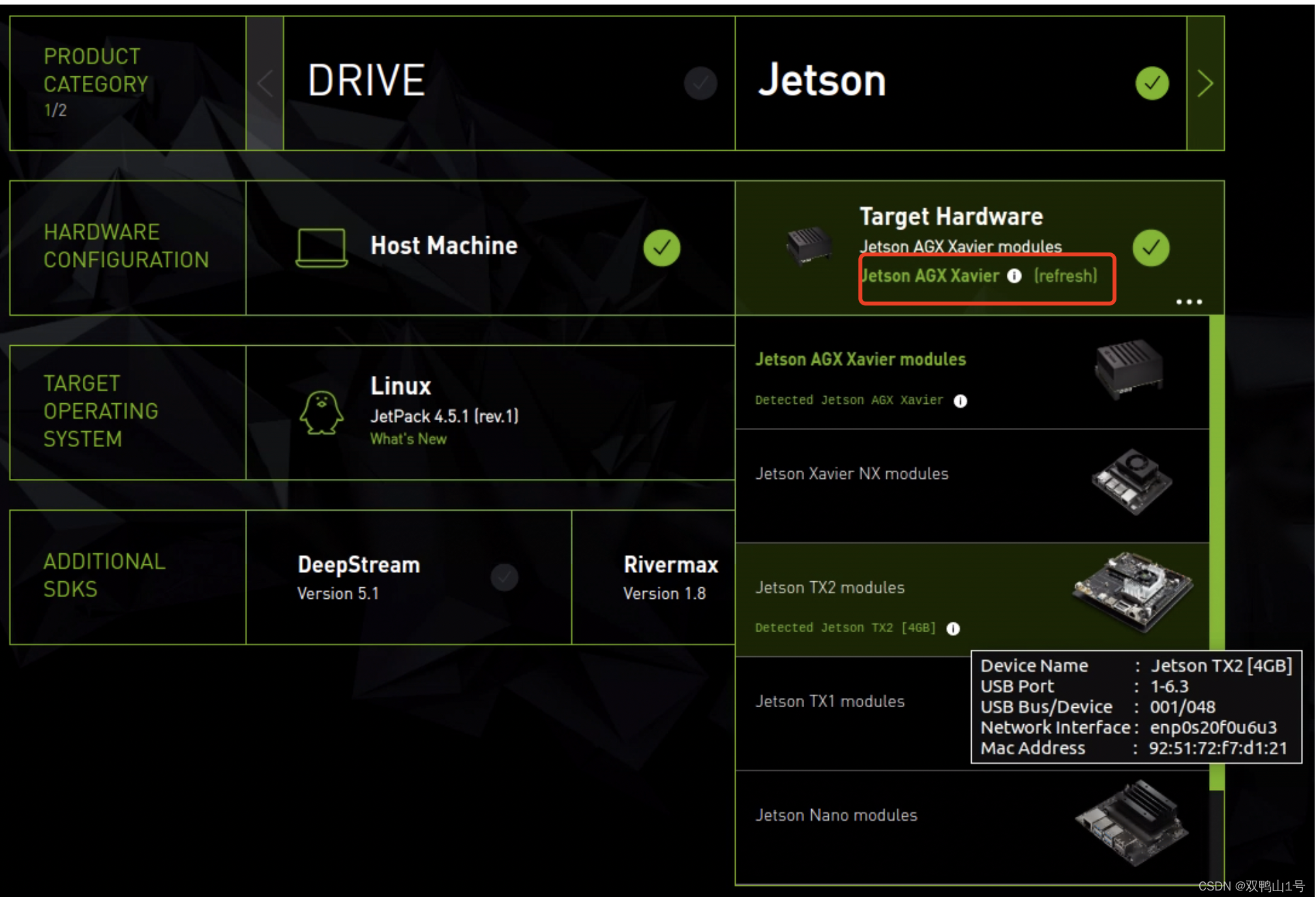
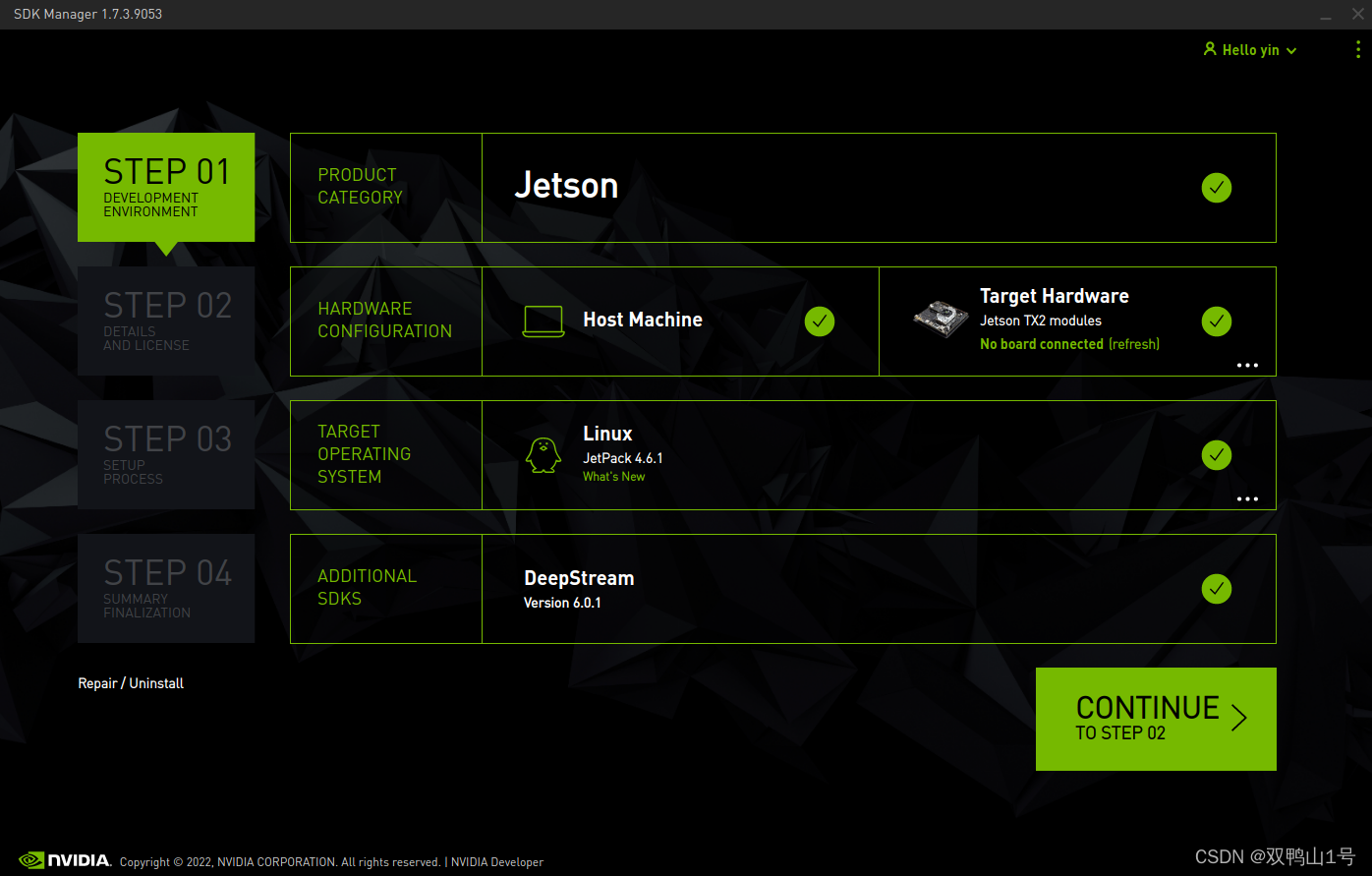
- 打开 sdk manager,如果usb 连接成功,下面红框框处应该会检测到 Jetson TX2,该图使用的是官网的图片,自己实验时忘记截图了:
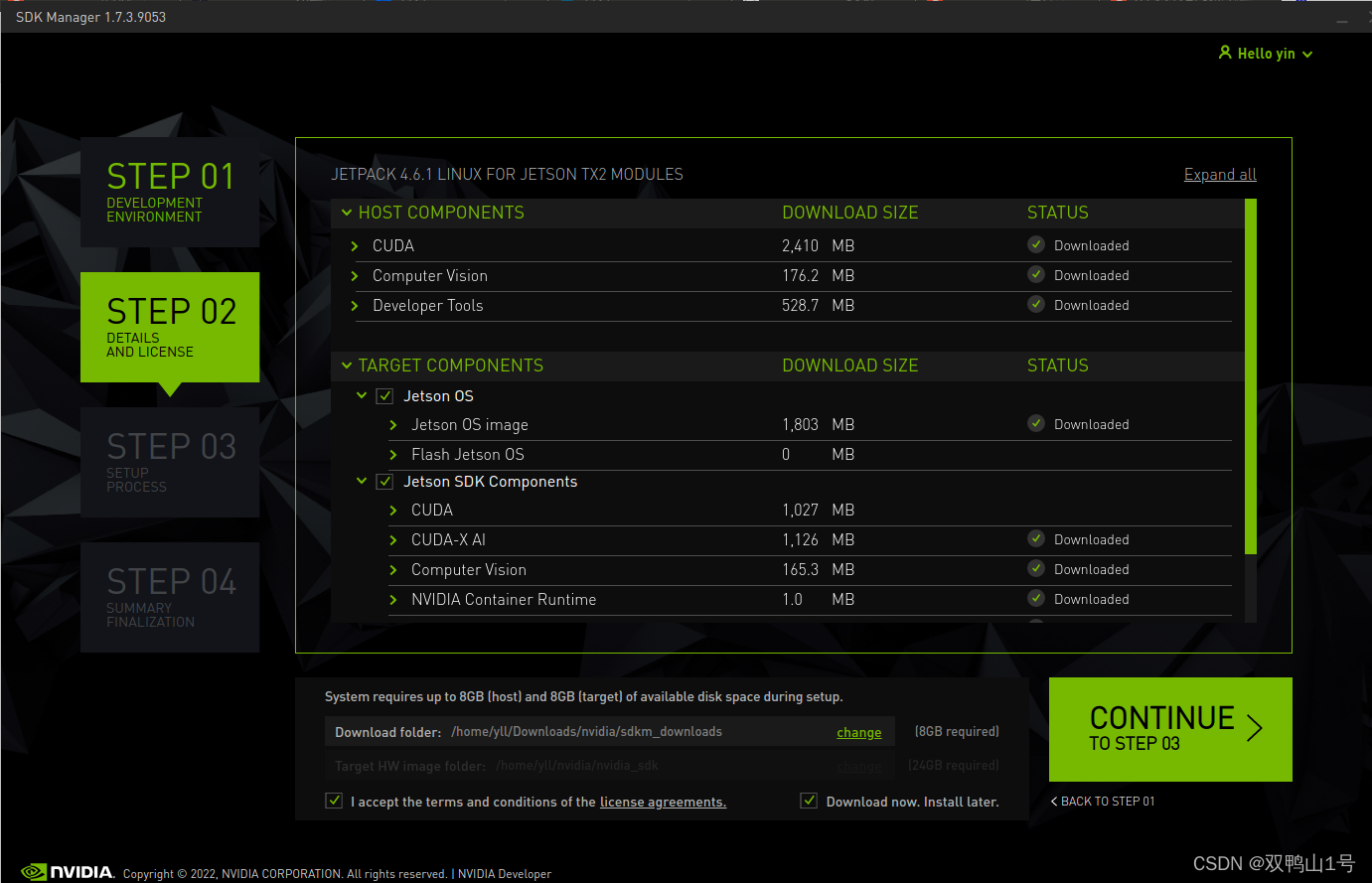
在 STEP 01 中可以都勾选上, TARGET OPERATING SYSTEM 可以下拉自行选择。
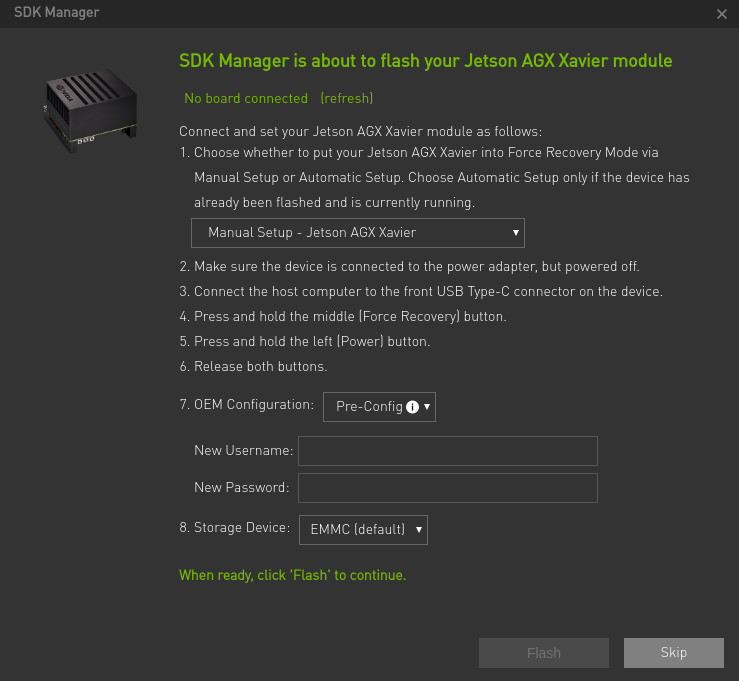
在刷机时,最好使用 usb连接, 选择 Manual Setup 方式安装:
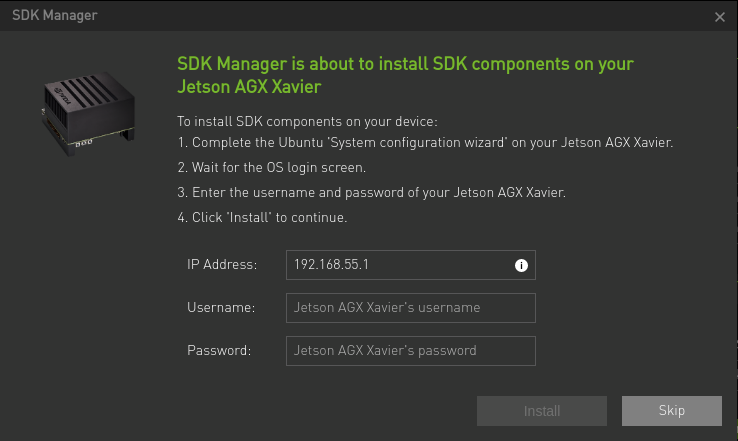
安装 SDK cuda等组件 (可与上一步分开操作):
此时 jetson tx2 已经刷机完成,可以进入 jetson tx2 查看 IP地址(与主机 Host 同一局域网)。我们可以填上 Jetson TX2 的IP 地址,利用 Wi-Fi 进行传输,安装 cuda 等组件。
后记:
sdk manager 刷机时下载的 Os Image 或者 SDK 组件 等存放在(可指定):
安装路径存放在:


这些文件如果不嫌弃太大,可以不用删除,下次再需要刷机时就省去了下载的功夫了。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)