catkin_make编译错误at /opt/ros/melodic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
CMake Error at /opt/ros/melodic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by
"socketcan_interface" with any of the following names:
socketcan_interfaceConfig.cmake
socketcan_interface-config.cmake
Add the installation prefix of "socketcan_interface" to CMAKE_PREFIX_PATH
or set "socketcan_interface_DIR" to a directory containing one of the above
files. If "socketcan_interface" provides a separate development package or
SDK, be sure it has been installed.
Call Stack (most recent call first):
robotiq/robotiq_3f_gripper_control/CMakeLists.txt:4 (find_package)
-- Configuring incomplete, errors occurred!
See also "/home/li/catkin_ws/build/CMakeFiles/CMakeOutput.log".
See also "/home/li/catkin_ws/build/CMakeFiles/CMakeError.log".
Invoking "cmake" failed
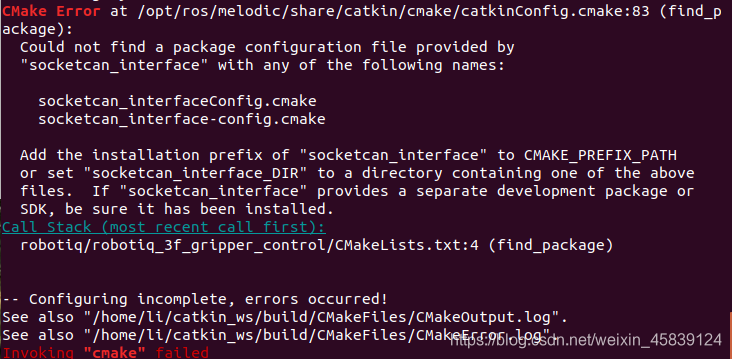
不知道什么原因,编译突然出现问题,提示缺少socketcan_interface组件,可是真心不知道这是啥组件,更不知道在哪个功能包里和去安装哪个功能包,所以尝试网上安装多种功能包以及重新安装一遍ros都不能解决问题,既然找不到组件的功能包,但可以找到大的功能包,删掉src下的大功能包一个个尝试,注意备份和还原,最后找到删除robotiq功能包编译成功。肯定是robotiq功能包中少了某一个组件导致编译不成功。
然后重新下载robotiq功能包。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)