20210505更新
前天的bug,修改了marker点的尺寸和颜色后在rviz中不显示的问题解决了,代码什么的完全没有改,只是用了sudo apt-get upgrade,把ros的一些包和库都升级了,然后发现这个问题就解决了,可以正常显示了,看来这个upgrade还是很用的,以前比较少用这个,觉得没什么大作用,没想到,今天编译其他东西后,发现连带着以前的bug也解决了
2021.05.05
20210503更新
显示多个Marker点
Target:想看看机械臂需要停驻的点
Method:
用Rviz里面的marker和markerarray显示多个点:
先上代码:
#include <ros/ros.h>
#include <ros/console.h>
#include <nav_msgs/Path.h>
#include <std_msgs/String.h>
#include <geometry_msgs/Quaternion.h>
#include <geometry_msgs/PoseStamped.h>
#include <tf/transform_broadcaster.h>
#include <tf/tf.h>
#include <visualization_msgs/Marker.h>
#include <visualization_msgs/MarkerArray.h>
#include <fstream>
#include <iostream>
#include <sstream>
using namespace std;
double PI = 3.1415926;
main (int argc, char **argv)
{
ros::init (argc, argv, "showpath");
ros::NodeHandle ph;
ros::Publisher vis_pub = ph.advertise<visualization_msgs::MarkerArray>( "visualization_marker", 10 );
ifstream selected_robot("/home/will/catkin_ws/src/gazebo_mobile_manipulator/data/uvc_point.txt");
ifstream selected_robot_euler_angle("/home/will/catkin_ws/src/gazebo_mobile_manipulator/data/uvc_angle.txt");
if (!selected_robot.is_open())
{
cout << "can not open selected_robot file" << endl;
return 0;
}
if (!selected_robot_euler_angle.is_open())
{
cout << "can not open selected_robot_euler_angle file" << endl;
return 0;
}
char c, c2;
int line=0;
int line2=0;
while(selected_robot.get(c))
{
if (c=='\n')
line++;
}
while(selected_robot_euler_angle.get(c2))
{
if (c2=='\n')
line2++;
}
printf("line sum: %d %d\n", line, line2);
double position[line+1][3];
double euler[line2+1][3];
selected_robot.clear();
selected_robot.seekg(ios::beg);
selected_robot_euler_angle.clear();
selected_robot_euler_angle.seekg(ios::beg);
for (int i = 0; i < line+1; i++)
{
for (int j = 0; j < 3; j++)
{
selected_robot >> position[i][j];
selected_robot_euler_angle >> euler[i][j];
}
}
ros::Rate loop_rate(50);
int count = 0;
while (ros::ok())
{
visualization_msgs::MarkerArray marker;
for (int i = 0; i < line+1; i++)
{
visualization_msgs::Marker points;
points.header.frame_id = "base";
points.header.stamp = ros::Time::now();
points.ns = "points";
points.action = visualization_msgs::Marker::ADD;
points.id = i;
points.type = visualization_msgs::Marker::SPHERE_LIST;
points.scale.x = 0.1;
points.scale.y = 0.1;
points.scale.z = 0.1;
points.pose.orientation.x = 0;
points.pose.orientation.y = 0;
points.pose.orientation.z = 0;
points.pose.orientation.w = 1;
points.color.r = 1.0;
points.color.a = 1.0;
geometry_msgs::Point p;
p.x = position[i][0];
p.y = position[i][1];
p.z = position[i][2];
cout << i << " x y z= " << position[i][0] << " " << position[i][1] << " " << position[i][2] << endl;
cout << endl << endl;
points.points.push_back(p);
marker.markers.push_back(points);
}
cout << "MarkerArray points size: " << marker.markers.size() << endl;
vis_pub.publish(marker);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}
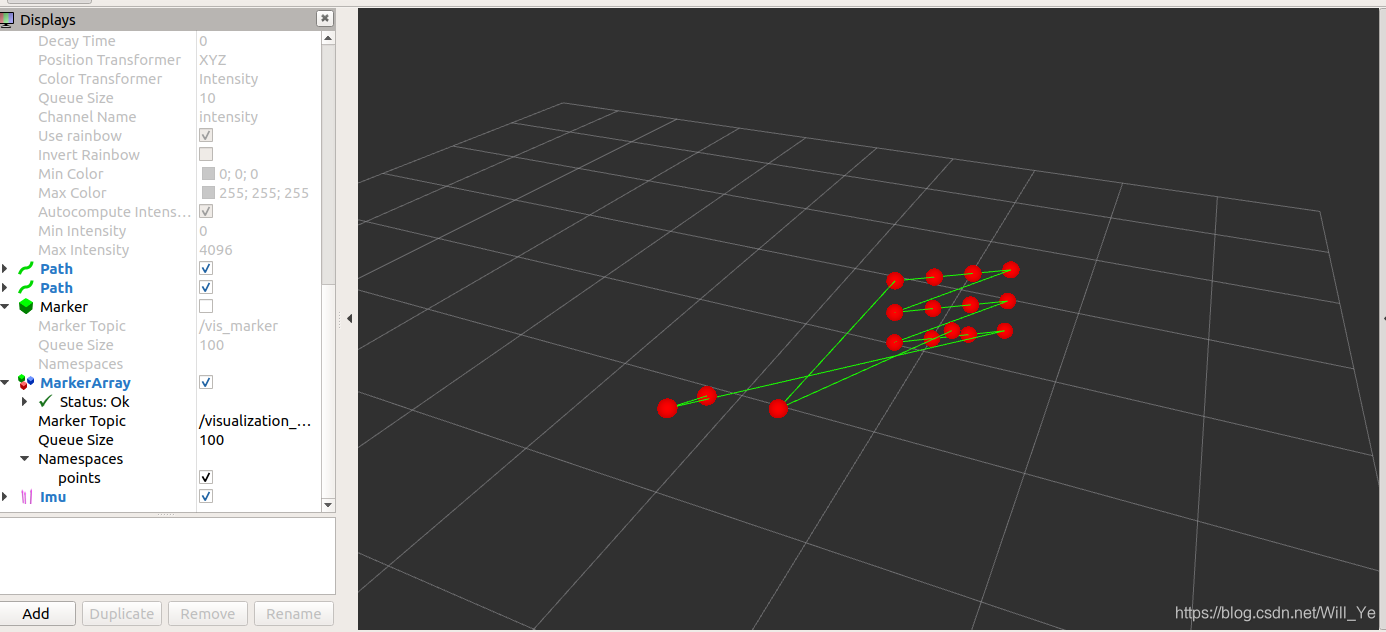
效果如下:
产生了对应的点,但是很奇怪,非常不明显,我设置点的尺寸大小和颜色好像没有作用一样,我换了好几种尺寸和颜色,最后编译完,显示的还是原来的模样,弄了一上午,也没找到解决方法,如果有路过的大神,望指点一二。
虽然不是很明显,但是能看到对应的点,也算可以讲究着用,其实我也试了marker那个显示工具,也是一样的效果,太奇怪了,懵逼。
2021.05.03
Target:
显示两条轨迹,一个是Ground true trajectory,另一个是机器人仿真的End-effector trajectory
Method:
1. 建立Ground Ture 节点
1)写一个节点发布Ground true的空间坐标和姿态,建一个以showpath.cpp命名的文件,如下:
#include <ros/ros.h>
#include <ros/console.h>
#include <nav_msgs/Path.h>
#include <std_msgs/String.h>
#include <geometry_msgs/Quaternion.h>
#include <geometry_msgs/PoseStamped.h>
#include <tf/transform_broadcaster.h>
#include <tf/tf.h>
#include <fstream>
#include <iostream>
#include <sstream>
using namespace std;
double PI = 3.1415926;
double position[16][3] = {0};
double euler[16][3] = {0};
main (int argc, char **argv)
{
ros::init (argc, argv, "showpath");
ros::NodeHandle ph;
ros::Publisher path_pub = ph.advertise<nav_msgs::Path>("trajectory",1, true);
ros::Time current_time, last_time;
current_time = ros::Time::now();
last_time = ros::Time::now();
nav_msgs::Path path;
path.header.stamp=current_time;
path.header.frame_id="base";
ifstream selected_robot("/home/will/catkin_ws/src/gazebo_mobile_manipulator/src/py_script/uvc_point.txt");
ifstream selected_robot_euler_angle("/home/will/catkin_ws/src/gazebo_mobile_manipulator/data/uvc_angle.txt");
if (!selected_robot.is_open())
{
cout << "can not open selected_robot file" << endl;
return 0;
}
if (!selected_robot_euler_angle.is_open())
{
cout << "can not open selected_robot file" << endl;
return 0;
}
for (int i = 0; i < 16; i++)
{
for (int j = 0; j < 3; j++)
{
selected_robot >> position[i][j];
selected_robot_euler_angle >> euler[i][j];
}
}
for (int i = 0; i < 16; i++)
{
for (int j = 0; j < 3; j++)
{
cout << euler[i][j] << ", ";
}
cout << endl;
}
int count = 0;
while (ros::ok())
{
current_time = ros::Time::now();
geometry_msgs::PoseStamped this_pose_stamped;
this_pose_stamped.pose.position.x = position[count][0];
this_pose_stamped.pose.position.y = position[count][1];
this_pose_stamped.pose.position.z = position[count][2];
geometry_msgs::Quaternion goal_quat = tf::createQuaternionMsgFromRollPitchYaw(euler[count][0]/180*PI, euler[count][1]/180*PI, euler[count][2]/180*PI);
cout << "goal_quat.x = "<< goal_quat.x <<endl;
this_pose_stamped.pose.orientation.x = goal_quat.x;
this_pose_stamped.pose.orientation.y = goal_quat.y;
this_pose_stamped.pose.orientation.z = goal_quat.z;
this_pose_stamped.pose.orientation.w = goal_quat.w;
this_pose_stamped.header.stamp=current_time;
this_pose_stamped.header.frame_id="base";
path.poses.push_back(this_pose_stamped);
path_pub.publish(path);
ros::spinOnce();
last_time = current_time;
count ++;
if (count > 15)
{
count =15;
}
}
return 0;
}
从代码中可以发现,我是从两个txt文件中读取位置和姿态的信息,然后建立一个topic,以trajectory命名,把这两个信息发布出去。
2)在Rviz中读取这个topic,显示对应的轨迹
打开Rviz后,点击左下角的Add,然后添加Path,如下图所示:
 编译(别忘了在CMakeLists中添加生成执行文件那两行代码)完成后,先运行
编译(别忘了在CMakeLists中添加生成执行文件那两行代码)完成后,先运行showpath.cpp
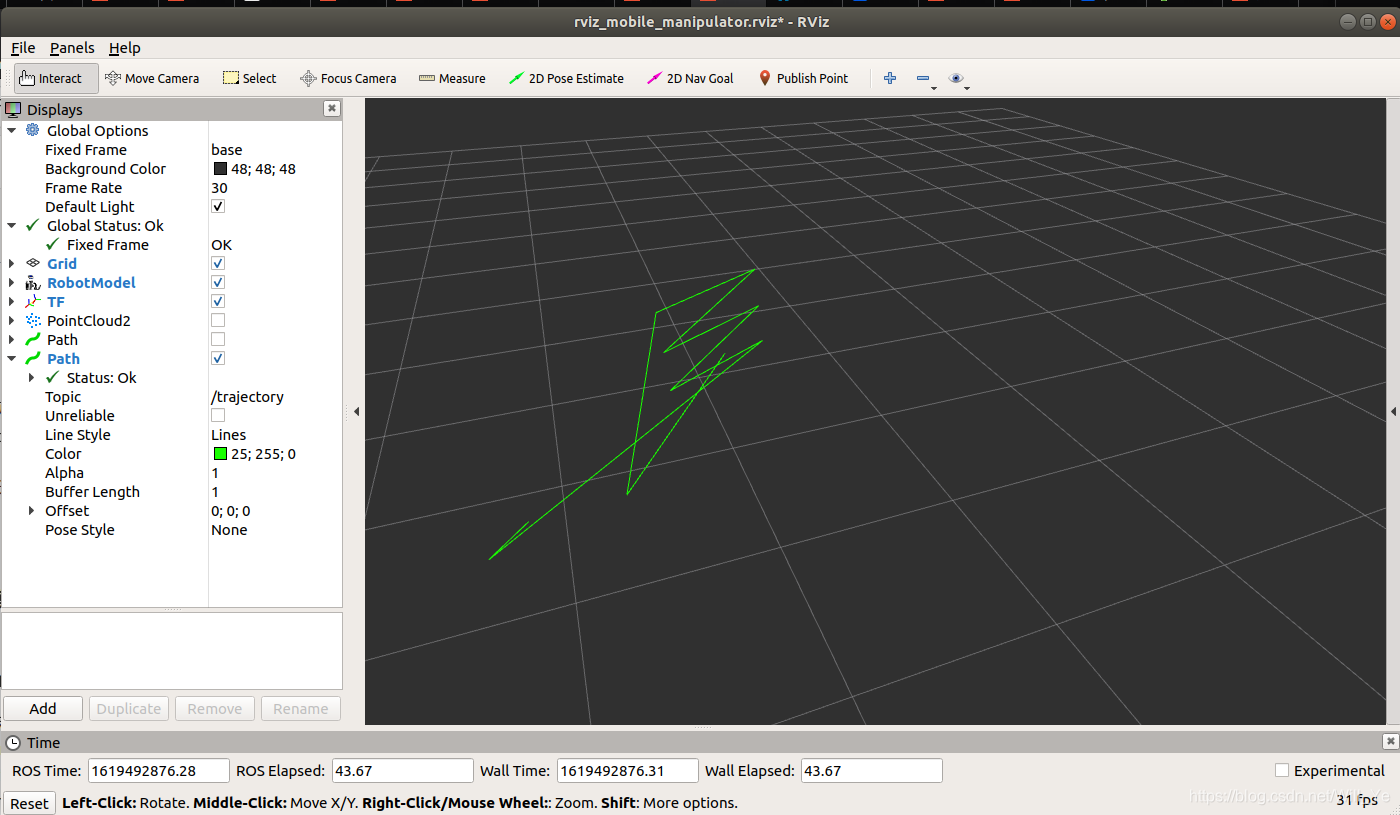
然后在path中的Topic选择刚刚我们发布的/trajectory话题,就可以看到Ground true的轨迹了,如下图所示:
2. 仿真模型实时发布末端轨迹
这一步就要比上一步发布Ground true trajectory要麻烦一点。
1)调用TF监听当前模型的End-effector的位姿
这一步其实也不用单独建一个node来做这件事,只需要在我们控制robot运动的node里面多发一个topic,这个topic发送的信息源于TF的监听信息(position and orientation),根据实际情况,自由安排这个topic放在哪里。例程如下,有些内容有删减掉了,监听部分核心内容都在里面了。
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
#include <sensor_msgs/JointState.h>
#include <tf/transform_listener.h>
#include <nav_msgs/Path.h>
using namespace Eigen;
using namespace std;
double PI = 3.1415926;
int main(int argc, char *argv[])
{
ros::init(argc, argv, "pub_command");
ros::NodeHandle nh;
ros::Publisher pub = nh.advertise<sensor_msgs::JointState>("/joint_commands", 20);
ros::Publisher path_pub = nh.advertise<nav_msgs::Path>("EE_trajectory",1, true);
ros::Rate r(20);
tf::TransformBroadcaster broadcaster;
tf::TransformListener listener;
ros::Time current_time, last_time;
current_time = ros::Time::now();
last_time = ros::Time::now();
nav_msgs::Path path;
path.header.stamp=current_time;
path.header.frame_id="base";
while(nh.ok()){
tf::StampedTransform transform;
try
{
listener.waitForTransform("/base", "/EE", ros::Time(0), ros::Duration(3.0));
listener.lookupTransform("/base", "/EE", ros::Time(0), transform);
}
catch (tf::TransformException &ex)
{
ROS_ERROR("%s",ex.what());
ros::Duration(1.0).sleep();
continue;
}
ROS_INFO("Transform x y z: %f %f %f",transform.getOrigin().x(),transform.getOrigin().y(),transform.getOrigin().z());
ROS_INFO("Transform Rotation x y z w: %f %f %f %f",transform.getRotation().x(),transform.getRotation().y(),
transform.getRotation().z(),transform.getRotation().w());
current_time = ros::Time::now();
geometry_msgs::PoseStamped this_pose_stamped;
this_pose_stamped.pose.position.x = transform.getOrigin().x();
this_pose_stamped.pose.position.y = transform.getOrigin().y();
this_pose_stamped.pose.position.z = transform.getOrigin().z();
this_pose_stamped.pose.orientation.x = transform.getRotation().x();
this_pose_stamped.pose.orientation.y = transform.getRotation().y();
this_pose_stamped.pose.orientation.z = transform.getRotation().z();
this_pose_stamped.pose.orientation.w = transform.getRotation().w();
this_pose_stamped.header.stamp=current_time;
this_pose_stamped.header.frame_id="base";
path.poses.push_back(this_pose_stamped);
path_pub.publish(path);
ros::spinOnce();
r.sleep();
}
}
注意:
1.要添加#include <tf/transform_listener.h>这个头文件,TF监听需要用到的函数都在里面了。
2. listener.lookupTransform("/base", "/UV", ros::Time(0), transform);代码中的这一句,读取的是两个坐标系之间的空间位置和旋转关系,从基座标系/base到末端的坐标系/EE,对应的名字,查看自己的URDF文件,或者直接在Rviz里面也可以看到
3. ros::Publisher path_pub = nh.advertise<nav_msgs::Path>("EE_trajectory",1, true);发布的topic名为EE_trajectory
4.transform.getOrigin().x();用这个函数就可以读取我们指定的两个坐标系之间的位置关系,用transform.getRotation()这个函数可以读取我们指定的两个坐标系之间的旋转关系,注意,读取的是四元数,应该只有四元数,我其实想读取RPY的,但是查了手册,没有读取RPY的函数,所以只能用四元数了,要是有新的TF库更新,欢迎大家告诉我,让我也update一下。不知道tf2有没有这个功能,我一直在用tf,没查看过tf2.
2)这一步也跟上一个创建Ground true节点的操作是一样的
在Rviz中Add一个新的Path,然后在topic中选择EE_trajectory这个topic,接着,控制机器人运动,就可以看到实时生成的轨迹了,下过如下图:
 上图中红色线是实时生成的轨迹,绿色线就是ground true的轨迹了,这样一对比,就很清楚的知道控制部分的代码效果如何了。
上图中红色线是实时生成的轨迹,绿色线就是ground true的轨迹了,这样一对比,就很清楚的知道控制部分的代码效果如何了。
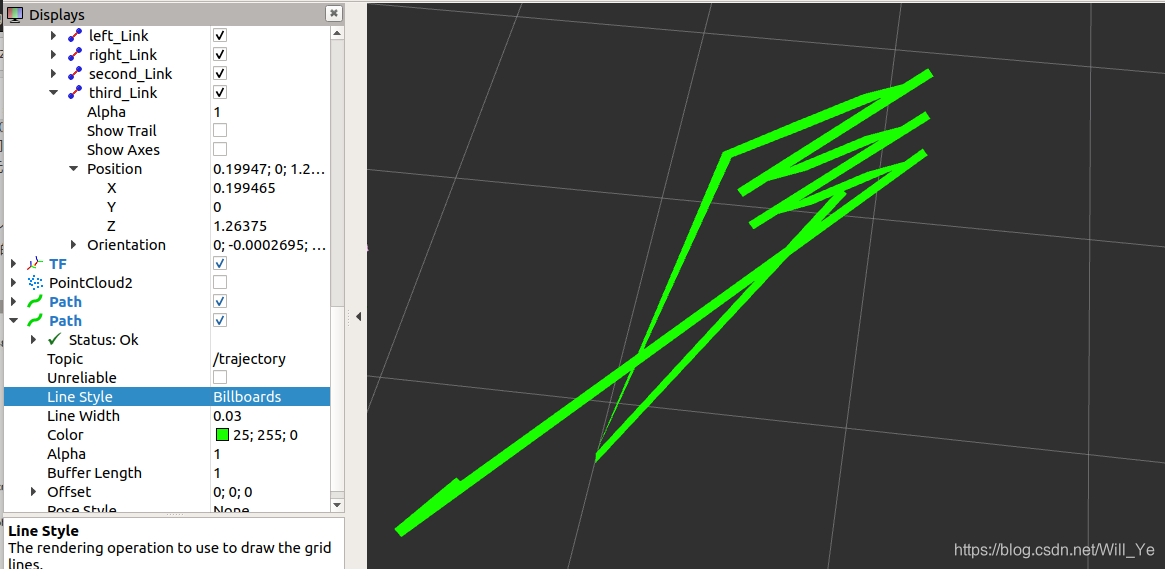
此外,如果觉得线条不够粗,可以在path中选择线性,默认的line style是lines,但是还有另一种Billboards,这个类型多了一个参数,就是line width,然后就可以根据实际需要,改变线宽了,但是我用这个类型的时候,不知道为什么,rviz会突然自己关闭,很奇怪,用lines类型就没出现这种情况。
Reference
-
ROS中rviz显示运动轨迹的常见方法:
https://blog.csdn.net/u013834525/article/details/80447931?utm_medium=distribute.pc_relevant.none-task-blog-2%7Edefault%7EBlogCommendFromBaidu%7Edefault-5.control&dist_request_id=&depth_1-utm_source=distribute.pc_relevant.none-task-blog-2%7Edefault%7EBlogCommendFromBaidu%7Edefault-5.control
-
ROS之rviz显示历史运动轨迹、路径的各种方法(visualization_msgs/Marker、nav_msgs/Path):
https://blog.csdn.net/u013834525/article/details/80447931?utm_medium=distribute.pc_relevant.none-task-blog-2%7Edefault%7EBlogCommendFromBaidu%7Edefault-5.control&dist_request_id=&depth_1-utm_source=distribute.pc_relevant.none-task-blog-2%7Edefault%7EBlogCommendFromBaidu%7Edefault-5.control
-
详解ROS中的TF使用:
https://blog.csdn.net/qq_37394634/article/details/105494587?utm_medium=distribute.pc_aggpage_search_result.none-task-blog-2aggregatepagefirst_rank_v2~rank_aggregation-1-105494587.pc_agg_rank_aggregation&utm_term=ros+%E4%B8%ADtf%E7%9A%84%E4%BD%BF%E7%94%A8&spm=1000.2123.3001.4430
-
tf::Transform Class Reference:
http://docs.ros.org/en/jade/api/tf/html/c++/classtf_1_1Transform.html
-
ROS之rviz显示历史运动轨迹、路径的各种方法(visualization_msgs/Marker、nav_msgs/Path):
https://haoqchen.site/2018/05/25/ROS-show-trajectory/
-
ROS在rviz中实时显示轨迹和点:
https://yunchengjiang.blog.csdn.net/article/details/108514336?utm_medium=distribute.pc_relevant.none-task-blog-2%7Edefault%7EBlogCommendFromMachineLearnPai2%7Edefault-3.control&dist_request_id=1332036.7678.16191425010885527&depth_1-utm_source=distribute.pc_relevant.none-task-blog-2%7Edefault%7EBlogCommendFromMachineLearnPai2%7Edefault-3.control
-
rviz中使用MarkerArray绘制地图线:https://blog.csdn.net/qq_35277038/article/details/84848555
-
rviz中的标记(markers)和交互标记(interactive markers):https://blog.csdn.net/wxflamy/article/details/79347689?utm_medium=distribute.pc_relevant.none-task-blog-baidujs_title-0&spm=1001.2101.3001.4242
-
Rviz教程-Marker:点和线(C++):https://blog.csdn.net/wilylcyu/article/details/56847503?utm_medium=distribute.pc_relevant.none-task-blog-2%7Edefault%7EBlogCommendFromMachineLearnPai2%7Edefault-3.control&depth_1-utm_source=distribute.pc_relevant.none-task-blog-2%7Edefault%7EBlogCommendFromMachineLearnPai2%7Edefault-3.control
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)