1 install ceres
Could not find a package configuration file provided by “Ceres” with any of
the following names:
CeresConfig.cmake
ceres-config.cmake
git clone https:
or
git clone https:
# CMake
sudo apt-get install cmake
# google-glog + gflags
sudo apt-get install libgoogle-glog-dev libgflags-dev
# BLAS & LAPACK
sudo apt-get install libatlas-base-dev
# Eigen3
sudo apt-get install libeigen3-dev
# SuiteSparse and CXSparse (optional)
sudo apt-get install libsuitesparse-dev
cd ceres-solver
mkdir build
cd build
cmake ..
make -j4
sudo make install
cmake -D CMAKE_INSTALL_PREFIX="/some/where/local" ..
此时在 CMakeLists.txt 中使用 find_package(Ceres REQUIRED PATHS "/some/where/local/ ") 才会找到 Ceres 库的头文件、库文件。
cmake ..
此时直接在 CMakeList.txt 文件中写入 find_package(Ceres) 即可找到该库。
2
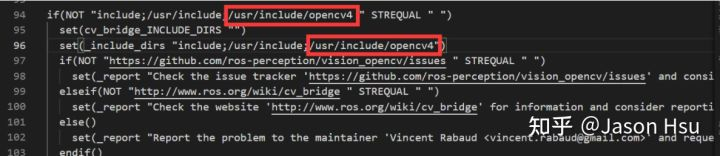
Project ‘cv_bridge’ specifies ‘/usr/include/opencv’ as an include dir,
which is not found. It does neither exist as an absolute directory nor in
‘${{prefix}}//usr/include/opencv’. Check the issue tracker
sudo gedit /opt/ros/melodic/share/cv_bridge/cmake/cv_bridgeConfig.cmake
3 install pcl
Could not find a package configuration file provided by “PCL” (requested
version 1.7) with any of the following names:
PCLConfig.cmake
pcl-config.cmake
安装依赖
sudo apt-get update
sudo apt-get install git build-essential linux-libc-dev
sudo apt-get install cmake cmake-gui
sudo apt-get install libusb-1.0-0-dev libusb-dev libudev-dev
sudo apt-get install mpi-default-dev openmpi-bin openmpi-common
sudo apt-get install libflann1.9 libflann-dev
sudo apt-get install libeigen3-dev 这个需要自己下载正确版本安装
sudo apt-get install libboost-all-dev
sudo apt-get install libvtk6.3-qt libvtk6.3 libvtk6-qt-dev
sudo apt-get install libqhull* libgtest-dev
sudo apt-get install freeglut3-dev pkg-config
sudo apt-get install libxmu-dev libxi-dev
sudo apt-get install mono-complete
sudo apt-get install openjdk-8-jdk openjdk-8-jre
在ubuntu18.04中libtk已经从网上说的5.10版本变成了7.10。当然随着时间的退役7.10也会被舍弃,这时我们要用到
sudo apt-cache search libvtk
我们用这行命令去搜索libtk的最新版本。
在ubuntu18.04中qt-sdk已经被舍弃,亲身测试不需要安装。
下载编译
下载就不用说了,这是网址https://github.com/PointCloudLibrary/pcl.git ,可手动下载也可用git下载
git clone https:
接下来进行编译
cd pcl
mkdir release
cd release
cmake -DCMAKE_BUILD_TYPE=None -DCMAKE_INSTALL_PREFIX=/usr \ -DBUILD_GPU=ON-DBUILD_apps=ON -DBUILD_examples=ON \ -DCMAKE_INSTALL_PREFIX=/usr ..
make
sudo make install
4
Specify CUDA_TOOLKIT_ROOT_DIR
直接输入安装cuda10.2
sudo apt-get update
sudo apt-get install cuda-toolkit-10-2
安装CUDA最新的10.2版本。进入Nvidia cuda下载地址:
https://developer.nvidia.com/cuda-downloads
依次选择对应系统和版本等信息:

我们这里选择的Ubuntu 18.04下的deb安装类型。然后依次执行下述7条命令:
wget https:
sudo mv cuda-ubuntu1804.pin /etc/apt/preferences.d/cuda-repository-pin-600
wget http:
sudo dpkg -i cuda-repo-ubuntu1804-10-2-local-10.2.89-440.33.01_1.0-1_amd64.deb
sudo apt-key add /var/cuda-repo-10-2-local-10.2.89-440.33.01/7fa2af80.pub
sudo apt-get update
sudo apt-get -y install cuda
参考网站
https:
Ubuntu18.04+CUDA10.2 深度学习开发环境配置指南
5 nlopt
Could not find a package configuration file provided by “NLopt” with any of
the following names:
NLoptConfig.cmake
nlopt-config.cmake
sudo apt install ros-melodic-nlopt
git clone https:
cd nlopt
mkdir build
cd build
cmake ..
make
sudo make install
6 install opencv
**下载opencv3.4.2和opencv-contrib-3.4.2
https://gitee.com/mirrors/opencv/tags
https://gitee.com/mirrors/opencv_contrib/tags
解压opencv3.4.0和opencv_contrib3.4.0文件,将后者移动到opencv3.4.0文件夹中;
将opencv3.4.0更名为opencv,opencv_contrib文件更名为opencv_contrib;
在opencv文件中新建文件夹build
opencv文件长这样

/usr/local 是指默认将要 install 的路径
sudo apt-get install build-essential
sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
sudo apt-get install python-dev python-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff5-dev libdc1394-22-dev
sudo apt-get install libavcodec-dev libavformat-dev libswscale-dev libv4l-dev liblapacke-dev
sudo apt-get install libxvidcore-dev libx264-dev
sudo apt-get install libatlas-base-dev gfortran
sudo apt-get install ffmpeg
cd opencv
mkdir build
cd build
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local -D OPENCV_EXTRA_MODULES_PATH=~/opencv/opencv_contrib/modules/ ..
make
make install
OPENCV_EXTRA_MODULES_PATH=~/opencv/opencv_contrib/modules/ … 是指 opencv_contrib3.4.0 中 modules所在的路径,后面的两点不可省略
7 install nomechaine
https:
8opencv2/cudaoptflow.hpp
0: fatal error: opencv2/cudaoptflow.hpp: No such file or directory #include <opencv2/cudaoptflow.hpp>
nx上默认安装的是opencv4,采用cmake编译的时候,cmake也能找到opencv4,但是编译时候报错:
fatal error: opencv2/opencv.hpp: No such file or directory
#include <opencv2/opencv.hpp>
解决方案
这是因为opencv头文件的路径中多了一个opencv4的文件夹:/usr/include/opencv4/opencv2,
可以将opencv2文件夹链接到include文件夹下
sudo ln -s /usr/include/opencv4/opencv2 /usr/include/
9 find_if(frameset
/home/uav/Desktop/flycarcq_ws/src/realflight_modules/realsense2_camera/src/base_realsense_node.cpp:2223:29: error: ‘find_if’ was not declared in this scope
texture_frame_itr = find_if(frameset.begin(), frameset.end(), [&texture_source_id, &available_formats] (rs2::frame f)
std::find_if(profi +++++std::
10 #include <opencv2/cudaoptflow.hpp>
/home/uav/Desktop/flycarcq_ws/src/realflight_modules/VINS-Fusion-gpu/vins_estimator/src/estimator/…/featureTracker/feature_tracker.h:21:10: fatal error: opencv2/cudaoptflow.hpp: No such file or directory
#include <opencv2/cudaoptflow.hpp>
和普通opencv的安装区别就是:cmake中告诉编译器,需要安装cuda版本opencv。
cmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local -D WITH_TBB=ON -D WITH_V4L=ON -D WITH_QT=ON -D WITH_OPENGL=ON -D WITH_CUDA=ON -D ENABLE_FAST_MATH=1 -D CUDA_FAST_MATH=1 -D CUDA_NVCC_FLAGS=“-std=c++11 --expt-relaxed-constexpr” -D WITH_CUBLAS=1 -D OPENCV_EXTRA_MODULES_PATH=/home/uav/driver_pacakge/opencv/opencv_contrib/modules/ -D CUDA_GENERATION=Kepler -D OPENCV_ENABLE_NONFREE=True …
sudo make -j8
sudo make install
这里需要注意的地方有:
-DCMAKE_INSTALL_PREFIX=/usr/local/opencv3.3.0,由于我装了多个版本opencv,所以设置安装目录为这个,如果你是第一次安装,也可以设置为/usr/local。
-D CUDA_NVCC_FLAGS=“-std=c++11 --expt-relaxed-constexpr”,这句话是告诉cuda,也使用c++11来编译,否则会报错:“opencv cuda error: identifier “nullptr” is undefined”。
-DOPENCV_EXTRA_MODULES_PATH=/home/jaf/package/opencv-3.3.0/opencv_contrib-3.3.0/modules,这里需要自己指定位置。
https:
12
/usr/local/arm/opencv-3.4.0/opencv_contrib-3.4.0/modules/xfeatures2d/include/opencv2/xfeatures2d.hpp:42:10:
fatal error: /opencv2/xfeatures2d.hpp: No such file or directory
根据给的路径找到xfeature2d.hpp的文件并打开,找到第42行如下:
40 #ifndef OPENCV_XFEATURES2D_HPP
41 #define OPENCV_XFEATURES2D_HPP
42 #include"/opencv2/xfeatures2d.hpp"
改为绝对路径
40 #ifndef OPENCV_XFEATURES2D_HPP
41 #define OPENCV_XFEATURES2D_HPP
42#include"/usr/local/arm/opencv3.4.0/opencv_contrib3.4.0/modules/xfeatures2d/include/opencv2/xfeatures2d.hpp"
所有这种找不到的都这么解决。
对于boostdesc_bgm.i的问题直接下载到拟需要的文件夹。
opencv_contrib/modules/xfeatures2d/src/
编译OpenCV提示opencv_contrib缺少boostdesc_bgm.i等文件(超链接)
错误提示:
~/opencv_contrib/modules/xfeatures2d/src/boostdesc.cpp:673:20: fatal error: boostdesc_bgm.i: No such file or directory
解决方法:https://www.cnblogs.com/arxive/p/11778731.html
查看 build 文件夹下的日志文件 CMakeDownloadLog.txt,在日志文件CMakeDownloadLog.txt中搜索 boostdesc_bgm.i 关键词。日志文件里就有它的下载地址,到指定位置下载即可。https://github.com/opencv/opencv_contrib/issues/1301,点开上面这个网址往下拉,有人提供了缺失的各个文件的链接,点击保存. 或者直接在这个网页里搜索 BenbenIO 这个用户的回答。
或者到本文提供的下载镜像去下载:boostdesc_bgm.i,vgg_generated_48.i等.rar
下载后,直接拷贝源码并生存同名文件,放在 opencv_contrib/modules/xfeatures2d/src/ 路径下即可。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)