 OpenCV4 for CUDA安装
OpenCV4 for CUDA安装
OpenCV提供图像处理过程中的基础API,所以首先完成OpenCV4的构建。为了利用Jetson平台拥有CUDA加速的优势需要先安装OpenCV的CUDA版本。(Jetpack默认为非CUDA版本)
更新安装包
sudo apt update
sudo apt install -y build-essential cmake git libgtk2.0-dev pkg-config libswscale-dev libtbb2 libtbb-dev
sudo apt install -y python-dev python3-dev python-numpy python3-numpy
sudo apt install -y curl
安装视频和图片依赖
sudo apt install -y libjpeg-dev libpng-dev libtiff-dev
sudo apt install -y libavcodec-dev libavformat-dev
sudo apt install -y libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev
sudo apt install -y libv4l-dev v4l-utils qv4l2 v4l2ucp libdc1394-22-dev
克隆OpenCV和OpenCV_Contrib源码
curl -L https:
curl -L https:
解压缩包
unzip opencv-4.5.3.zip
unzip opencv_contrib-4.5.3.zip
cd opencv-4.5.3/
mkdir build
cd build/
使用Cmake编译工程
cmake -D WITH_CUDA=ON \
-D OPENCV_EXTRA_MODULES_PATH=../opencv_contrib/modules \
-D WITH_GSTREAMER=ON \
-D WITH_LIBV4L=ON \
-D BUILD_opencv_python2=ON \
-D BUILD_opencv_python3=ON \
-D BUILD_TESTS=OFF \
-D BUILD_PERF_TESTS=OFF \
-D BUILD_EXAMPLES=OFF \
-D CMAKE_BUILD_TYPE=RELEASE \
-D CMAKE_INSTALL_PREFIX=/usr/local ..
use cuda
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr -D OPENCV_ENABLE_NONFREE=1 -D BUILD_opencv_python2=1 -D BUILD_opencv_python3=1 -D WITH_FFMPEG=1 -D CUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda-10.2 -D CUDA_ARCH_BIN=7.2 -D CUDA_ARCH_PTX=7.2 -D WITH_CUDA=1 -D WITH_CUDNN=1 -D ENABLE_FAST_MATH=1 -D CUDA_FAST_MATH=1 -D WITH_CUBLAS=1 -D OPENCV_GENERATE_PKGCONFIG=1 -D OPENCV_EXTRA_MODULES_PATH=../opencv_contrib/modules -D BUILD_EXAMPLES=OFF -D CUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda-10.2 ..
编译和安装
make -j4
sudo make install
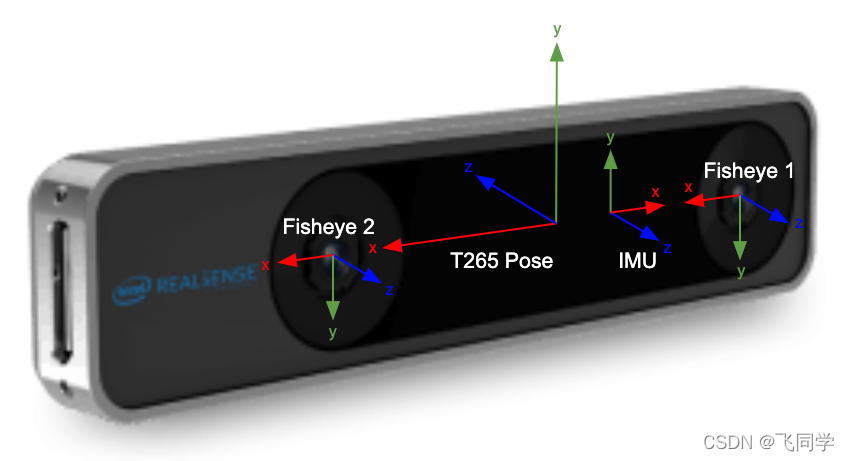
安装Intel® RealSense™ SDK
命令安装2进制包进行安装。
1: 注册服务器公钥
2: 添加镜像源
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u
3: 安装环境
sudo apt-get update
sudo apt-get install apt-utils -y
sudo apt-get install librealsense2-utils librealsense2-dev -y
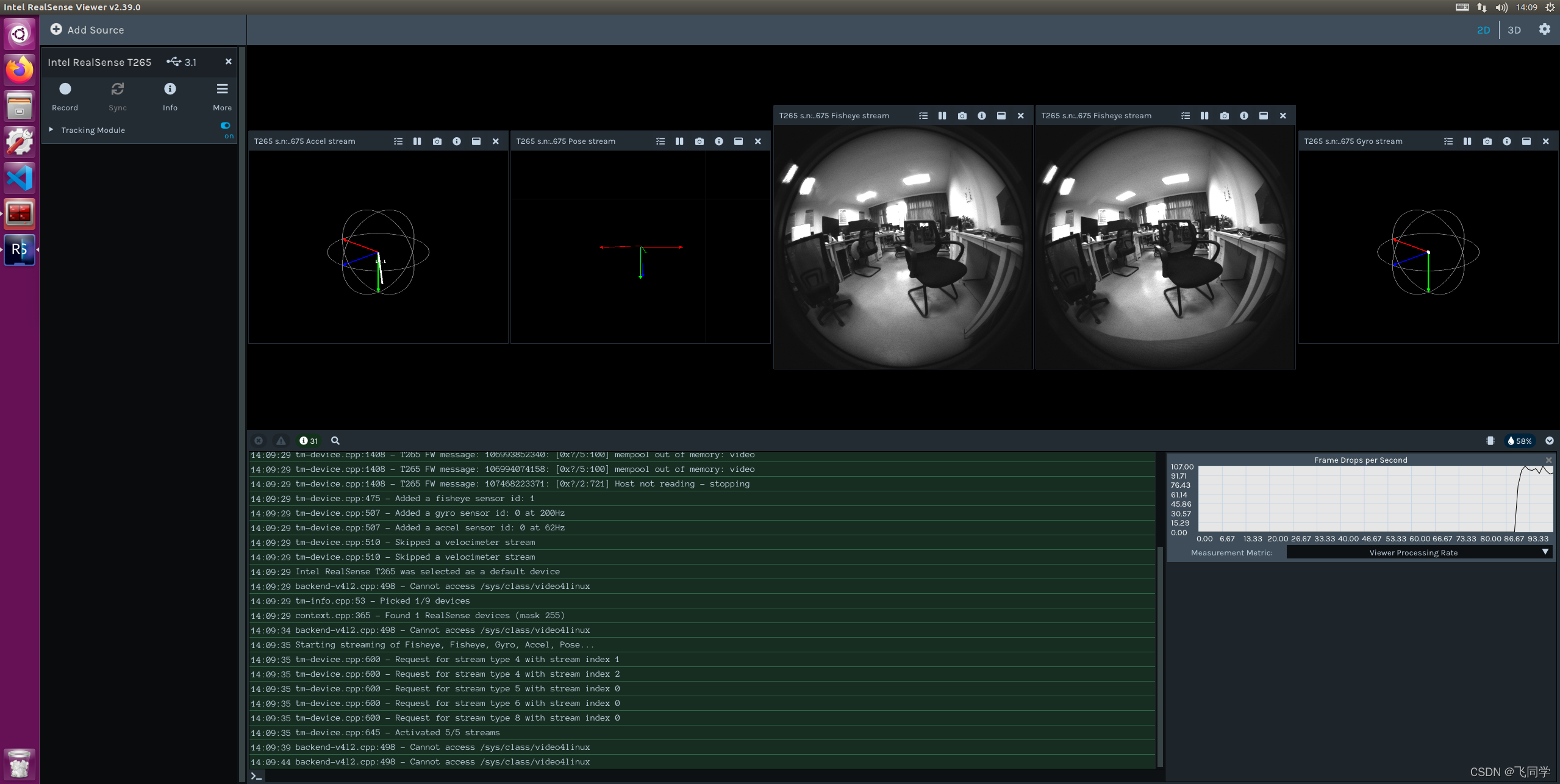
4: 插上T265 在终端里面运行 realsense-viewer 测试
realsense-viewer
如果成功运行,可以得到如下的界面效果
sh安装
安装脚本:https://github.com/jetsonhacks/installRealSenseSDK.git
请先克隆仓库,然后进行修改。
git clone https:
执行脚本
./buildLibrealsense.sh
安装realsense-ros
安装依赖
sudo apt-get install ros-melodic-ddynamic-reconfigure
创建工作区
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src/
克隆源码仓库
git clone https:
cd realsense-ros/
git checkout `git tag | sort -V | grep -P "^2.\d+\.\d+" | tail -1`
cd ..
构建模块
catkin_init_workspace
cd ..
catkin_make clean
解决问题
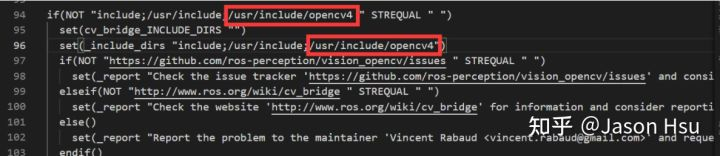
cv_bridge
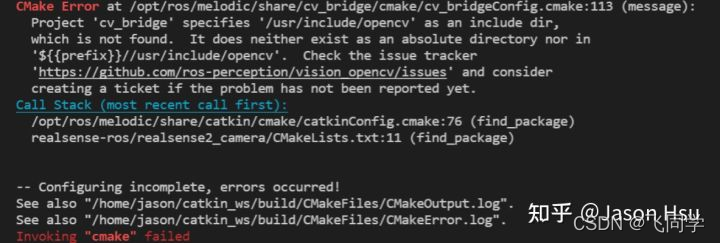
修改cv_bridge配置文件,将API对接到安装的OpenCV4 with CUDA
修改文件/opt/ros/melodic/share/cv_bridge/cmake/cv_bridgeConfig.cmake
ddynamic_reconfigure
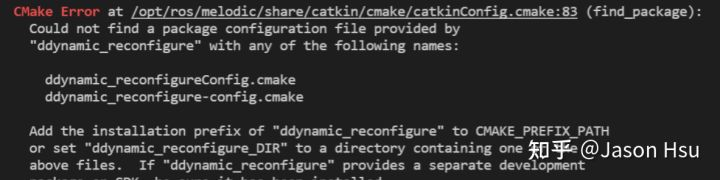
安装ddynamic_reconfigure:
sudo apt-get install ros-melodic-ddynamic-reconfigure
继续构建
catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
catkin_make install
添加环境变量
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
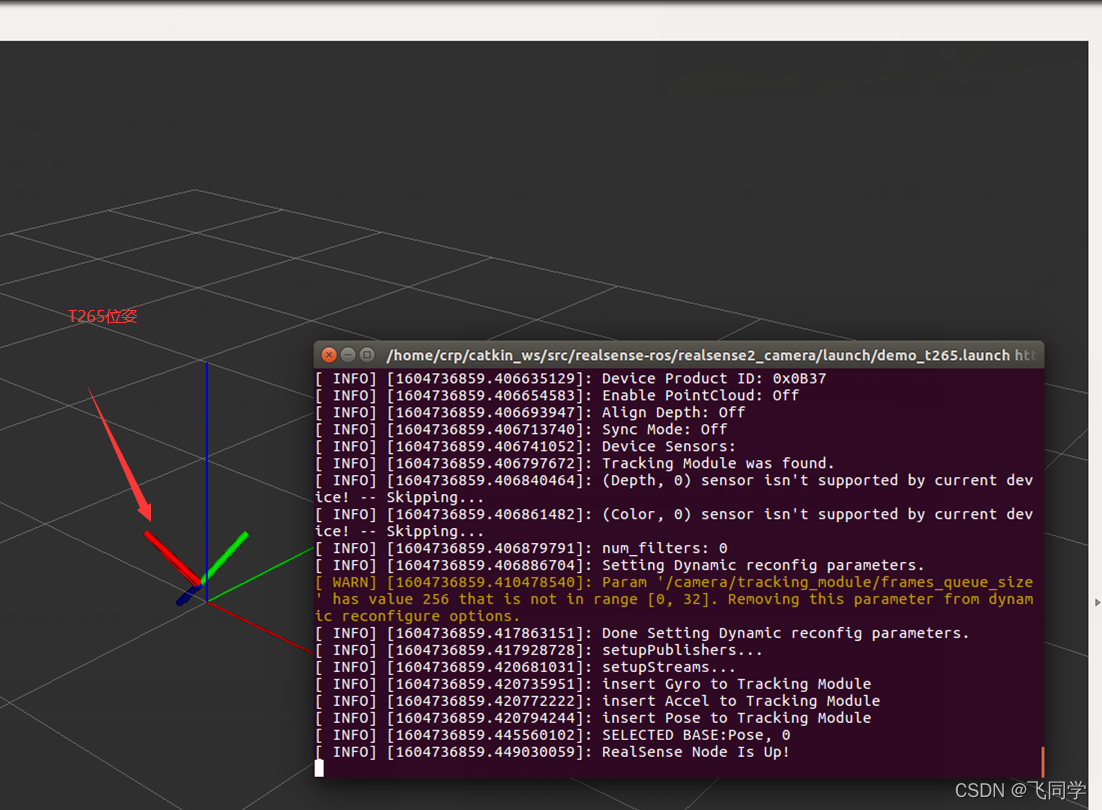
动测试demo,即可看到T265的位姿数据
roslaunch realsense2_camera demo_t265.launch
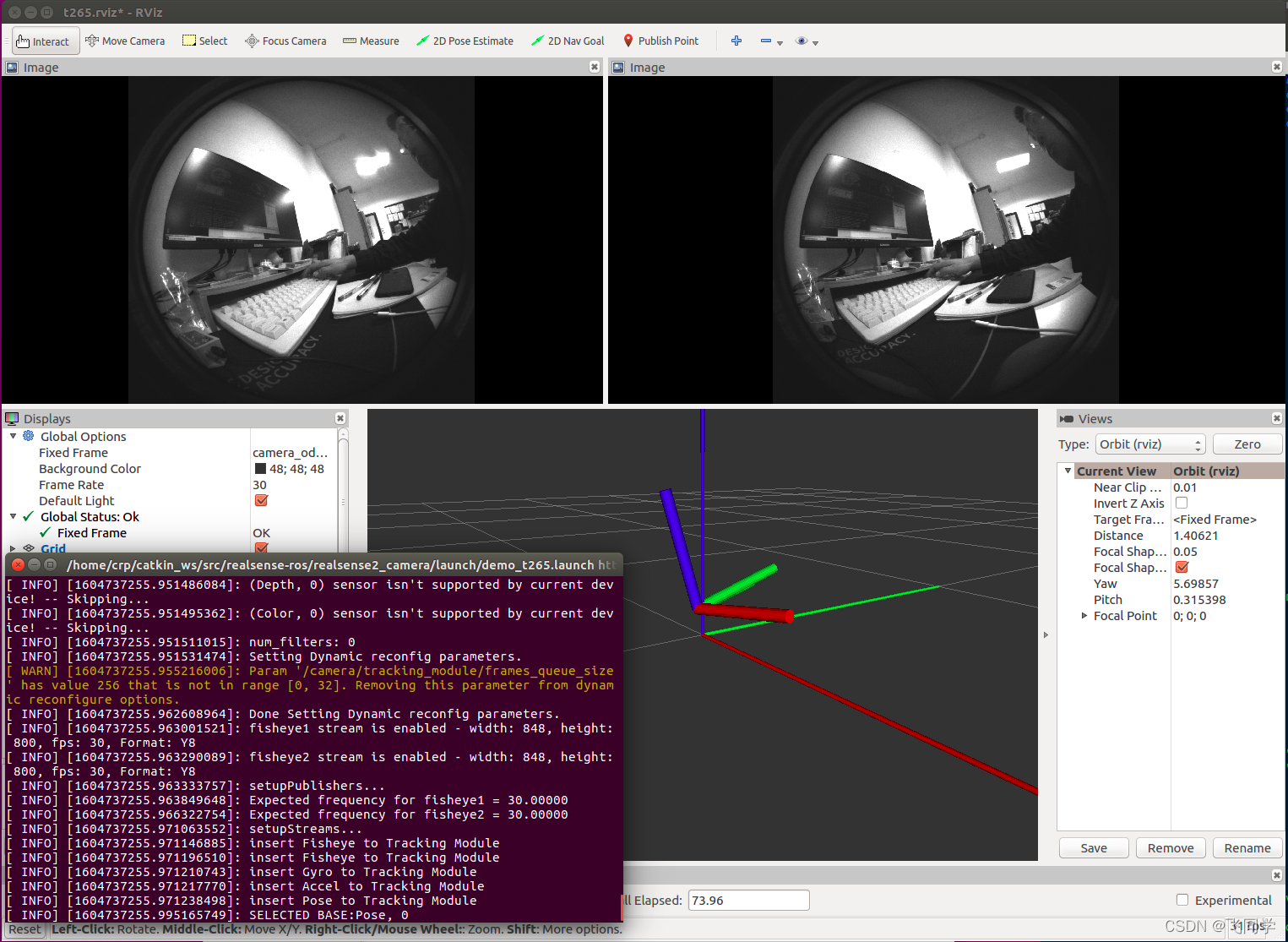
如果需要查看图像数据,则需要对rs_t265.launch lanunch文件中使能图像输出
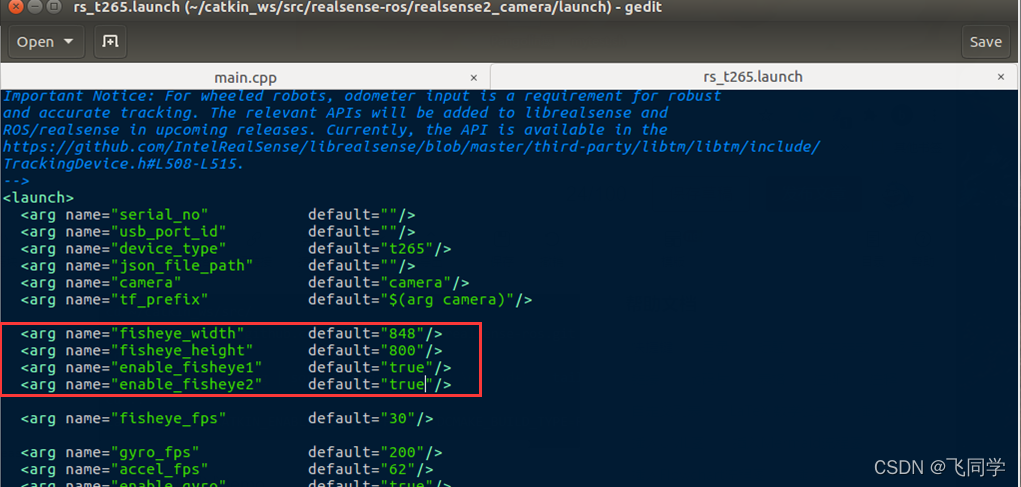
重新启动测试demo即可查看到图像数据
roslaunch realsense2_camera demo_t265.launch
使用Opencv库读取T265
#include<iostream>
#include<string>
#include <librealsense2/rs.hpp>
#include <opencv2/opencv.hpp>
#include<opencv2/core/core.hpp>
#include<opencv2/highgui/highgui.hpp>
using namespace std;
using namespace cv;
int main(int argc,char** argv)
{
rs2::config cfg;
cfg.enable_stream(RS2_STREAM_FISHEYE,1, RS2_FORMAT_Y8);
cfg.enable_stream(RS2_STREAM_FISHEYE,2, RS2_FORMAT_Y8);
cfg.enable_stream(RS2_STREAM_POSE, RS2_FORMAT_6DOF);
rs2::pipeline pipe;
pipe.start(cfg);
rs2::frameset data;
while (1)
{
data = pipe.wait_for_frames();
auto f = data.first_or_default(RS2_STREAM_POSE);
auto pose = f.as<rs2::pose_frame>().get_pose_data();
cout<<"px: "<<pose.translation.x<<" py: "<<pose.translation.y<<" pz: "<<pose.translation.z<<
"vx: "<<pose.velocity.x<<" vy: "<<pose.velocity.y<<" vz: "<<pose.velocity.z<<endl;
cout<<"ax: "<<pose.acceleration.x<<" ay: "<<pose.acceleration.y<<" az: "<<pose.acceleration.z<<
"gx: "<<pose.angular_velocity.x<<" gy: "<<pose.angular_velocity.y<<" gz: "<<pose.angular_velocity.z<<endl;
rs2::frame image_left = data.get_fisheye_frame(1);
rs2::frame image_right = data.get_fisheye_frame(2);
if (!image_left || !image_right)
break;
cv::Mat cv_image_left(cv::Size(848, 800), CV_8U, (void*)image_left.get_data(), cv::Mat::AUTO_STEP);
cv::Mat cv_image_right(cv::Size(848, 800), CV_8U, (void*)image_right.get_data(), cv::Mat::AUTO_STEP);
cv::imshow("left", cv_image_left);
cv::imshow("right", cv_image_right);
cv::waitKey(1);
}
return 0;
}
即可读取到T265的图像数据和位姿数据

参考资料
[1] https:
[2] https:
[3] https:
[4] https:
[5] https:
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)