已经有前辈将ubuntu14.04下的turtlebot教程翻译了过来,可以先行查看,对turtlebot的知识建立总体的认识:https://www.ncnynl.com/archives/201609/786.html
1. 安装依赖
sudo apt-get install ros-melodic-kobuki-*
sudo apt-get install ros-melodic-ecl-streams
sudo apt-get install libusb-dev
sudo apt-get install libspnav-dev
sudo apt-get install ros-melodic-joystick-drivers
sudo apt-get install bluetooth
sudo apt-get install libbluetooth-dev
sudo apt-get install libcwiid-dev
sudo apt-get install ros-melodic-bfl
2. 下载源代码文件
这里放上我整理之后的依赖文件,可以作为一个工作空间直接下载,最工作空间进行编译。
git clone https://gitee.com/massif_li/turtlebot_ws.git
cd turtlebot_ws
catkin_make
3. 连接 turtlebot ,执行指令
记得每打开一个终端,都要输入
source devel/setup.bash
在三个终端分别执行以下指令
roscore
roslaunch turtlebot_bringup minimal.launch
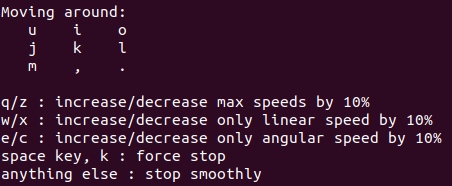
roslaunch turtlebot_teleop keyboard_teleop.launch
可以按照如图所示的按键向turtlebot发布指令
参考博客:
- https://zhuanlan.zhihu.com/p/151097395
- https://www.turtlebot.com/learn/
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)