0. 简介
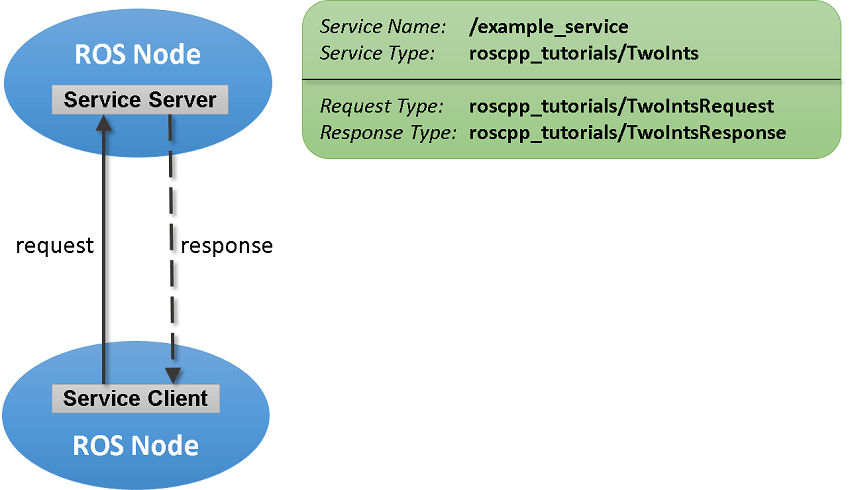
在前几讲我们讲了Matlab中的Message以及Topic的相关知识。而ROS主要支持的通信机制还有服务这一类。服务通过允许请求以及响应的通信方式,来给整个系统完成更紧密的耦合。服务客户端向服务服务器发送请求消息并等待响应。服务器将使用请求中的数据构造响应消息并将其发送回客户端。每个服务都有一个类型,该类型决定请求和响应消息的结构。
1. ROS1的服务端和客户端
1.1 创建服务端
在ROS1当中,如果希望创建一个简单的服务服务器,并在调用服务时能够显示“A service client is calling”。使用rosssvcserver命令创建服务。从而指定服务名称和服务消息类型。然后还要将回调函数定义为exampleHelperROSEmptyCallback。
为了获得更快的性能,一般我们在设置rossvcsrve时候带上结构格式消息类型。
testserver = rossvcserver("/test","std_srvs/Empty",@exampleHelperROSEmptyCallback,"DataFormat","struct")
testserver =
ServiceServer with properties:
ServiceType: ‘std_srvs/Empty’
ServiceName: ‘/test’
NewRequestFcn: @exampleHelperROSEmptyCallback
DataFormat: ‘struct’
当列出ROS网络中的所有服务时,可以看到新服务/test。
rosservice list
/add
/matlab_global_node_55791/get_loggers
/matlab_global_node_55791/set_logger_level
/node_1/get_loggers
/node_1/set_logger_level
/node_2/get_loggers
/node_2/set_logger_level
/node_3/get_loggers
/node_3/set_logger_level
/reply
/test
此外还可以使用rosservice info获取有关您的服务的更多信息。
rosservice info /test
Node: /matlab_global_node_55791
URI: rosrpc://ah-csalzber:51639
Type: std_srvs/Empty
Args: MessageType
1.2 创建客户端
使用服务客户机从ROS服务服务器请求信息。要创建客户端,请使用带有服务名称的rossvcclient作为参数。
为我们刚刚创建的/test服务创建一个服务客户机。
testclient = rossvcclient("/test","DataFormat","struct")
testclient =
ServiceClient with properties:
ServiceType: ‘std_srvs/Empty’
ServiceName: ‘/test’
DataFormat: ‘struct’
为服务创建一个空请求消息。使用rosmessage函数并将客户端作为第一个参数传递。这将创建一个具有服务指定的消息类型和格式的服务请求函数。
testreq = rosmessage(testclient)
testreq = struct with fields:
MessageType: ‘std_srvs/EmptyRequest’
确保服务已连接到客户端,并在必要时等待客户端连接。
waitForServer(testclient,"Timeout",3)
当您希望从服务器获得响应时,请使用call函数,该函数将调用服务服务器并返回响应。您之前创建的服务服务器将返回一个空响应。此外,它将调用exampleHelperROSEmptyCallback函数并显示字符串“A service client is calling”。您还可以定义一个Timeout参数,该参数指示客户机应该等待响应的时间。
testresp = call(testclient,testreq,"Timeout",3);
如果上面的调用函数失败,就会出错。如果希望使用条件对调用失败做出反应,则可以从调用函数返回状态和statustext输出,而不是错误。状态输出指示调用是否成功,而statustext提供其他信息。waitForServer也可以返回类似的输出。
numCallFailures = 0;
[testresp,status,statustext] = call(testclient,testreq,"Timeout",3);
if ~status
numCallFailures = numCallFailues + 1;
fprintf("Call failure number %d. Error cause: %s\n",numCallFailures,statustext)
else
disp(testresp)
end
MessageType: 'std_srvs/EmptyResponse'
1.3 两数之和
如果说我们想要完成两数求和这样的功能,我们可以先将现有的服务类型roscpp_tutorials/TwoInts用于此任务。您可以通过调用rosmsg show来检查请求和响应消息的结构。请求包含两个整数A和B,响应包含它们在Sum中的加法。
rosmsg show roscpp_tutorials/TwoIntsRequest
int64 A
int64 B
rosmsg show roscpp_tutorials/TwoIntsResponse
int64 Sum
使用此消息类型创建服务服务器和计算加法的回调函数。为了方便起见,exampleHelperROSSumCallback函数已经实现了这个计算。将函数指定为回调函数。
sumserver = rossvcserver("/sum","roscpp_tutorials/TwoInts",@exampleHelperROSSumCallback,"DataFormat","struct")
sumserver =
ServiceServer with properties:
ServiceType: ‘roscpp_tutorials/TwoInts’
ServiceName: ‘/sum’
NewRequestFcn: @exampleHelperROSSumCallback
DataFormat: ‘struct’
要调用服务服务器,必须创建一个服务客户机。注意,这个客户端可以在ROS网络中的任何地方创建。为了本例的目的,我们将在MATLAB中为/sum服务创建一个客户端。
sumclient = rossvcclient("/sum","DataFormat","struct")
sumreq = rosmessage(sumclient);
sumreq.A = int64(2);
sumreq.B = int64(1)
if isServerAvailable(sumclient)
sumresp = call(sumclient,sumreq,"Timeout",3)
else
error("Service server not available on network")
end
sumresp = struct with fields:
MessageType: ‘roscpp_tutorials/TwoIntsResponse’
Sum: 3
2. ROS2的服务端和客户端
…详情请参照古月居
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)