在上一篇文章中已经为大家介绍过Flight Review分析日志工具的具体使用,但是该工具在使用过程中难免存在一些问题,例如:Flight Review工具需要在线浏览,很多时候受制于电脑网络延迟等问题,导致日志信息加载失败;若要将不同的数据放在一个图表里进行对比查看,这款工具也无法满足需求。为解决以上问题,接下来笔者将为大家介绍另一款日志分析工具——Flightplot。
以下内容以实际的日志文件为例来介绍,若需获取该文件,可在文末留言。
Flightplot界面介绍
该软件的界面主要由四部分构成,分别是:打开日志(Open Log)、查看消息(Log Messages)、查看参数(Log Info)、选择数据类型(Fields List),如下图所示:

操作步骤
首先,点击Open Log可打开要查看的日志,下图为日志加载步骤,先点击Open Log,选择要查看的日志文件,再点击打开。

在Log Message部分可以查看飞行过程的所有的消息,例如解锁消息、起飞消息、以及飞行过程中的报错等。

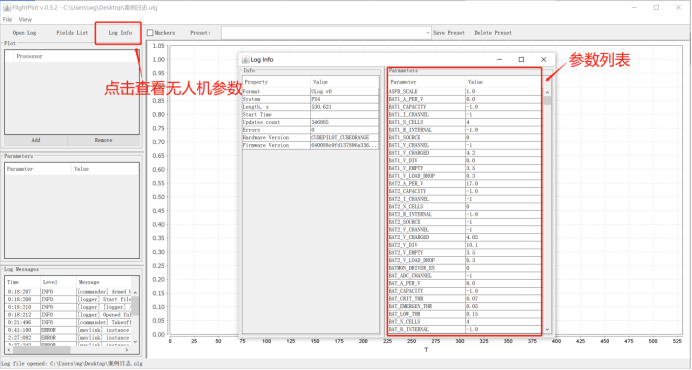
通过Log Info可以查看px4在QGC地面站中的全部参数,在这些参数里我们可以通过EKF2_AID_MASK与EKF2_HGT_MODE来查看无人机定位数据来源与高度数据来源。
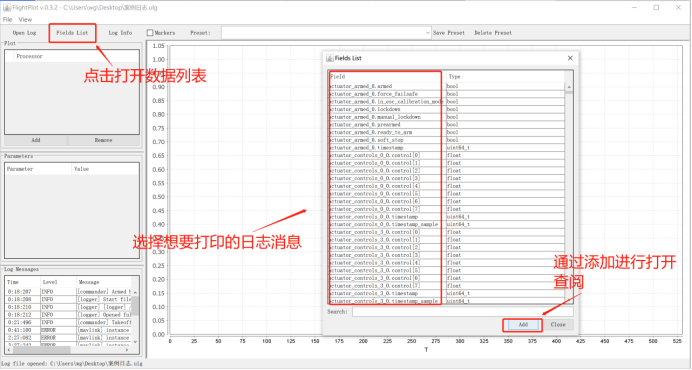
点击Fields List 选择想看的数据值,该项包含了许多日志信息,包括各种传感器信息。
常用参数
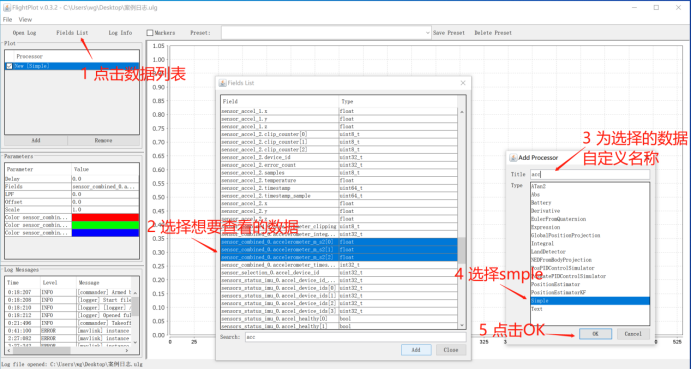
(1)sennor_combined_0.accelerometer_m_s2[012] 代表加速度情况。打开方式如下:
数据曲线如下图,红色曲线代表 x 轴加速度值,绿色曲线代表 y 轴加速度值,蓝色曲线代表 z 轴加速度值。对于 xy 曲线,加速度值在(-2,2)区间内表现为较好的震动情况;对于 z 轴曲线,加速度值在(-10,-15)区间内表现为较好的震动情况。对于无人机飞行稳定来说,震动水平有很大因素,较高的震动会导致无人机飞行效率降低,增加材料磨损,位置估计失败导致偏离飞行。

(2)estimator_attitude_1.q[0 1 2 3] 代表无人机实际的姿态。

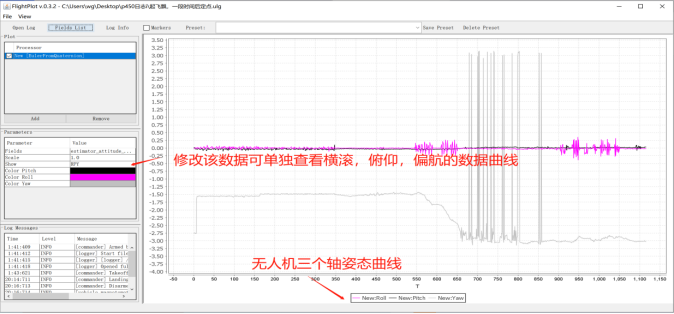
通过查看实际与期望的姿态曲线,可以了解到无人机飞行的状态,如果俩条曲线基本重合则表现较好,表面无人机可以快速的达到期望的姿态。
(3)无人机 xyz 方向实际位置参数如下:
vehicle_local_position_0.x
vehicle_local_position_0.y
vehicle_local_position_0.z
打开方式参考加速度数据打开方式,选择simple。

通过查看无人机x y z方向上的位置信息,可以判断无人机是否按照我们的规划进行飞行,当无人机飞行偏离规划的位置时,对比实际与期望位置有助于我们发现问题。
如需获得更多参数介绍请在文末下方留言。
Flightplot下载与安装
下载网址:https://github.com/PX4/FlightPlot/releases
安装教程:https://blog.csdn.net/qq_34994476/article/details/114376977
在日常的日志分析中,可以将Flight Review与Flightplot这两款日志分析工具结合使用,方便我们更全面地排查无人机飞行过程中的问题。
以上是笔者针对Flightplot工具的简要介绍,希望能够对大家有多帮助,如有错漏,欢迎各位在评论区留言指正~
笔者:阿木实验室工程师 吕国飞
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)