一、激光雷达的原理
激光雷达的原理类似于声呐,只不过这里我们用光代替声音,来衡量激光雷达与障碍物之间的距离。主要工作原理是向目标发射激光束(单线/多线),然后将反射信号与发射信号比较, 分析信号的折返时间(TOF)或频率差(多普勒频移),即可获得目标距离等相关参数。
为什么叫激光雷达?
激光是大量原子受激辐射所产生的发光行为,激光在传播中始终像一条笔直的细线,发散的角度极小。
如果一个激光雷达能够在同一个空间内,按照设定好的角度发射无数条激光,就能得到无数基于障碍物的反射信号。比如一条线速激光通过一个平面反射的障碍物信息,将得到一个平面地图;多条激光线速通过不同平面反射的障碍物信息,将得到一个三维地图。
二、激光雷达的作用
机器人自主定位与导航,常用于定位建图和避障导航,是移动机器人感知外界环境障碍物的眼睛。
三、常见的激光雷达类型,以及各自的优缺点和适用场景
1、线数划分
①单线激光雷达:
单线激光雷达只能完成平面扫描,其扫描速度快、分辨率和可靠性高,目前主要应用于服务机器人等对高度信息要求不高,需要规避障碍物的场景。
②多线激光雷达:
多线激光雷达可识别物体的高度信息(可理解为竖直方向的积分),目前业界以4~128线为主,造价昂贵,主要用于无人车自动驾驶等领域。
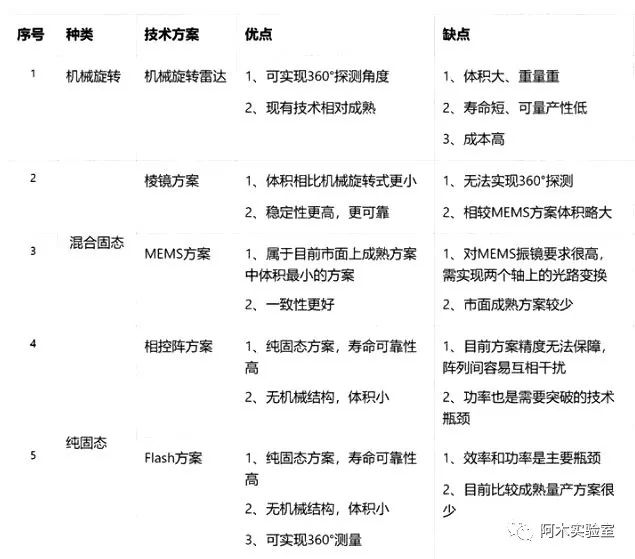
2、扫描方式划分
激光雷达按扫描方式大体可以分为三种类型,机械式、固态式和混合固态式。目前机械式最为常用,固态式为未来业界大力发展方向(固态指激光雷达为单个整体,没有需要旋转和可动扫描部件);混合式是机械式和纯固态式的折中方案(较机械式只扫描前方一定角度内的范围;较纯固态式仍有一些较小的活动部件),是目前阶段量产装车的主流产品。

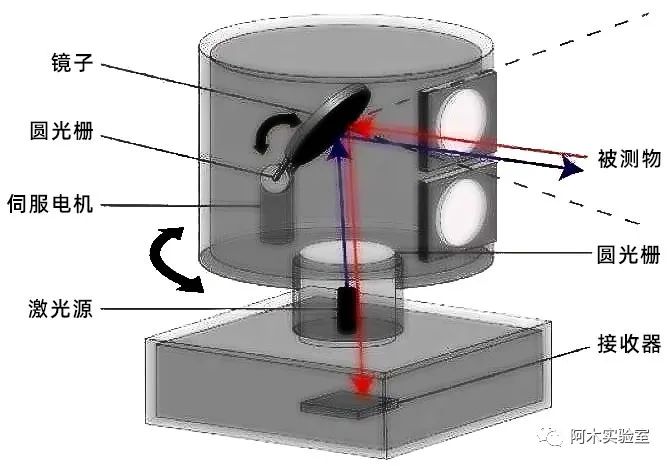
①机械旋转式激光雷达:
业界多为此种方案。发射系统和接收系统存在物理意义上的转动,不断的旋转发射器,将激光点变成线,并在竖直方向上排布多束激光发射器形成面,实现3D扫描的目标。但内部结构复杂,主要包括激光器、扫描器、光电探测器以及位置和导航器件。由于通过复杂的机械结构实现高频准确的转动,硬件成本高,且很难保持长时间稳定运行,业界寿命多为2~3万小时(正常使用约2~3年),因此目前固态激光雷达成为很多公司的研究方向。
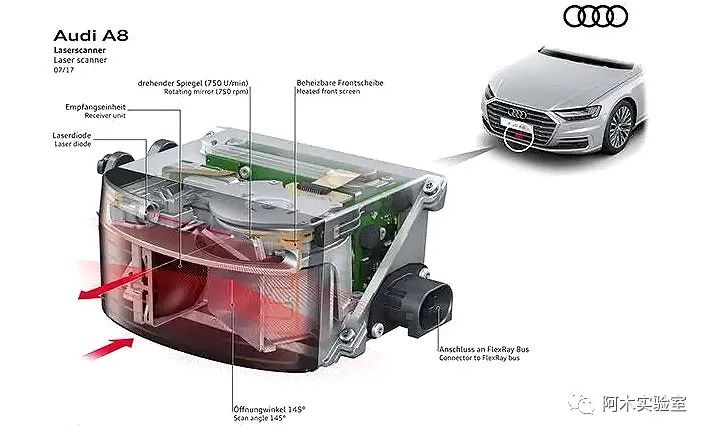
②微转镜激光雷达(混合固态):
转镜类似于机械式,保持收发模块不动,通过电机带动转镜运动,将激光反射到不同的方向实现一定范围内激光的扫描。目前转镜式激光雷达方案较成熟、易过车规,是目前自动驾驶上应用的比较多的方案,相比纯机械式,机械结构简单,体积相对较小,易于量产。
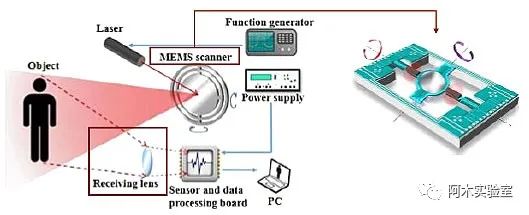
③MEMS激光雷达(混合固态):
MEMS(Micro-Electro-Mechanical System)采用微振镜扫描,在微观上实现激光雷达发射端的光束操纵。MEMS微振镜是一种硅基半导体元器件,技术成熟,集成度高,它的引入可以帮助激光雷达减少马达、多棱镜等机械运动装置,减小尺寸空间,同时还可以减少激光器和探测器数量,极大地降低成本。但是其尺寸较小,限制了扫描范围和视场角,且稳定性较低,过车规难度较大,目前量产一致性较低。
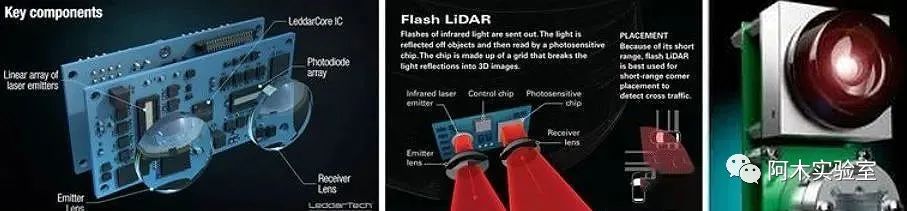
④泛光面阵式激光雷达(Flash,固态):
泛光面阵式是目前全固态激光雷达中较为成熟的技术(快闪,原理类似相机),它可以短时间直接发出一大片覆盖探测区域的激光,以高灵敏度的接收器来完成周围环境的绘制,能快速记录整个场景,避免了扫描过程中雷达或目标的移动带来的影响。但是由于每次发射的光线会散布在整个视场内,这意味着只有小部分激光会投射到某些特定点,很难进行远距离探测。
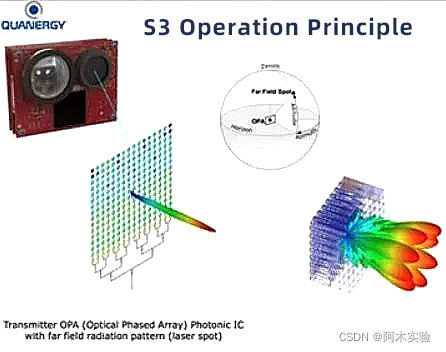
⑤光学相控式激光雷达(OPA,固态):
相控阵激光雷达采用多个光源组成阵列,通过控制各光源发光时间差(相对相位),合成具有特定方向的主光束,加以控制便可实现不同方向的扫描。光学相控阵要求单元尺寸不大于半个波长,目前激光雷达的工作波长均在1000nm左右,故阵列单元的尺寸不得大于500nm,加工难度较大。
我们今天推荐的这款激光雷达,主要特点:
1.小巧,重量轻,放到我们P600无人机上比较合适;
2.单线机械式激光雷达探测范围40M,室内外都可以用,技术成熟,成本低;
3.性价比高,适合科研,可大规模量产,用于室内服务机器人和工厂AGV等场景。
该产品支持合同对公、淘宝、京东自营/慧采等交易方式。如您对该产品感兴趣,可添加以下售前人员咨询。
阿木实验室:为机器人研发提供开源软硬件工具和课程服务,让研发更高效!
- End -
技术发展的日新月异,阿木实验室将紧跟技术的脚步,不断把机器人行业最新的技术和硬件推荐给大家。看到经过我们培训的学员在技术上突飞猛进,是我们培训最大的价值。如果你在机器人行业,就请关注我们的公众号,我们将持续发布机器人行业最有价值的信息和技术。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)