kalibr安装参考我的另一篇博客https://mp.csdn.net/mp_blog/creation/editor/117604718
除此之外,需要自己准备棋盘,以及棋盘的配置文件april_6x6_50x50cm.yaml
target_type: 'aprilgrid' #gridtype
tagCols: 6 #number of apriltags
tagRows: 6 #number of apriltags
tagSize: 0.055 #size of apriltag, edge to edge [m]
tagSpacing: 0.3 #ratio of space between tags to tagSize
首先录制数据包 包括两个灰度摄像头图像信息和IMU信息,录制过程中不能让棋盘出了图像范围,移动的时候不要过快,在六自由度上反复移动三次即可。
下面是录制好的图像包信息

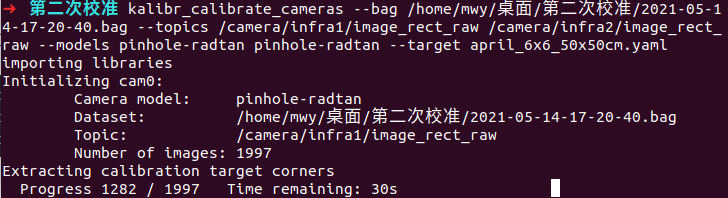
输入命令,开始两个相机的校准
kalibr_calibrate_cameras --bag /home/mwy/桌面/第二次校准/2021-05-14-17-20-40.bag --topics /camera/infra1/image_rect_raw /camera/infra2/image_rect_raw --models pinhole-radtan pinhole-radtan --target april_6x6_50x50cm.yaml
第一个参数是数据包 第二个参数是图像话题 第三个参数是相机的模型 第四个参数是标定版(棋盘)
校准的时候报了一个错,我之前好像没安装igraph,安装就好

sudo add-apt-repository ppa:igraph/ppa
sudo apt-get update
sudo apt-get install python-igraph
之后进入校准,等待片刻,漫长的等待
出来了几个文件

里面的重投影误差在0.2以内效果较好
之后进行相机与IMU的校准,准备好IMU的配置文件imu_realsense.yaml
#Accelerometers
accelerometer_noise_density: 0.2 #0.1 #0.2 #1.0e-03 #Noise density (continuous-time)
accelerometer_random_walk: 0.02 #0.001 #0.002 #0.039e-02 #Bias random walk
#Gyroscopes
gyroscope_noise_density: 0.05 #0.01 #0.05 #8.03e-05 #Noise density (continuous-time)
gyroscope_random_walk: 4.0e-5 #0.001 #4.0e-5 #4.8e-05 #Bias random walk
update_rate: 400.0 #Hz (for discretization of the values above)
rostopic: /camera/imu #/imu_ns/imu/imu_filter #/imu/data
校准命令
kalibr_calibrate_imu_camera --bag /home/mwy/桌面/第二次校准/2021-05-14-17-20-40.bag --cam camchain-homemwy桌面第二次校准2021-05-14-17-20-40.yaml --imu imu_realsense.yaml --target april_6x6_50x50cm.yaml
各参数意义很明显,就不说了
这一步校准依旧是漫长的等待,出来了几个文件,同样的重投影误差在0.2以内效果较好。
校准完毕
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)