官方python脚本使用文档
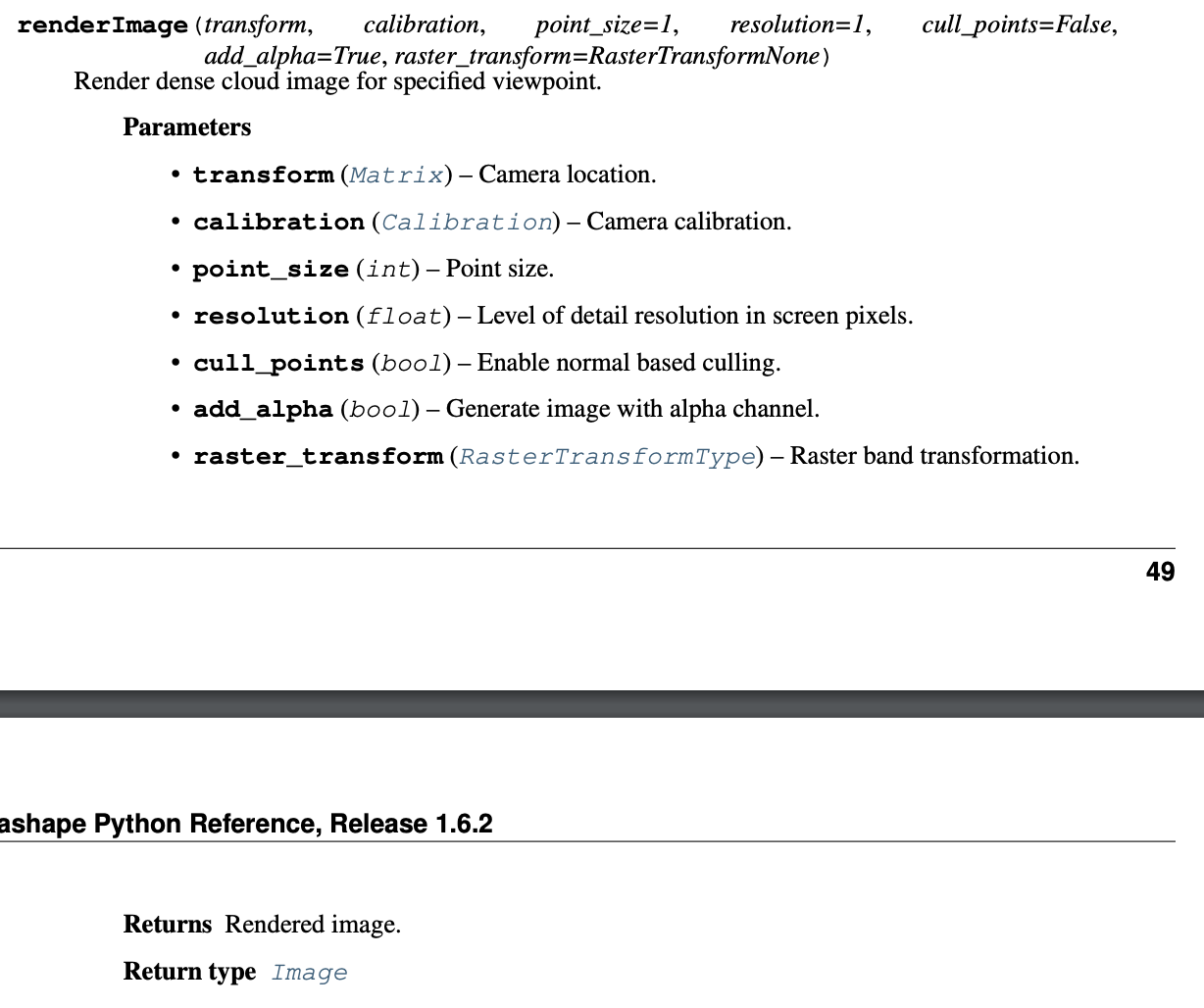
主函数: render=chunk.model.renderImage()
1. 实现特定视角的渲染需要通过脚本方式进行,原本的metashape pro中是没有这个功能的
首先在metashape pro所在的文件夹中新建 test.py ,将脚本内容写在该文件中,然后回到metashape Tools -> Run Script 运行 test.py 这样metashape界面就会出现一个新的 Scripts 选项,这个选项下,就是你所需要的通过脚本添加的功能。
注意:每一次 Run Scripts 集成的功能是固定死的… 如果代码发生修改,需要重新跑脚本添加相应功能,并且每个按钮是不覆盖的。
import json
import Metashape
import os
compatible_major_version = "1.6"
found_major_version = ".".join(Metashape.app.version.split('.')[:2])
if found_major_version != compatible_major_version:
raise Exception("Incompatible Metashape version: {} != {}".format(found_major_version, compatible_major_version))
def get_cameras(chunk):
selected_cameras = [camera for camera in chunk.cameras if camera.transform and camera.selected and camera.type == Metashape.Camera.Type.Regular]
if len(selected_cameras) > 0:
return selected_cameras
else:
return [camera for camera in chunk.cameras if camera.transform and camera.type == Metashape.Camera.Type.Regular]
def render_cameras():
print("Script started...")
chunk = Metashape.app.document.chunk
scene_json="/home/paper/Desktop/meta_100/querry_transforms.json"
with open(scene_json) as f:
test_transforms = json.load(f)
camera=get_cameras(chunk)
cm1=camera[0]
testnum = len(test_transforms["frames"])
print("test num:",testnum)
for idx in range(testnum):
frame = test_transforms["frames"][idx]
pose=frame["transform_matrix"]
picname = frame["file_path"][9:]
render = chunk.model.renderImage(pose, cm1.sensor.calibration)
photo_dir="/home/paper/Desktop/meta_100/meta_render/"
render.save(os.path.join(photo_dir, picname))
print("Script finished!")
label = "Scripts/Render free poses"
Metashape.app.addMenuItem(label, render_cameras)
print("To execute this script press {}".format(label))
2. 相机位姿的输入
可参照该问题:render an image of a point cloud seen from a pose, with certain intrinsics
3. Agisoft Photoscan/Mateshape 相机参数XML解读
实际的光心位置为图像 0.5×width / 0.5×height + cx / cy
实际相机旋转平移矩阵为将 transform 中的十六个元素组成4×4矩阵之后取逆
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)