文章目录
- 0. 说明
- 1. 安装大恒相机sdk
- 1.1 下载
- 1.2 安装sdk(用于配置ip和调试相机参数)
- (1) 电脑网卡配置(网卡固定ip)
- (2)查看相机图像以及配置相机参数
- 2. 安装ros驱动包(注:大恒相机官方没ros驱动)
- 2.0 正确流程
- 2.1 错误示范
- 2.1 报错1--缺包
- 2.2 报错2--包编译顺序问题,改`catkin_make`为`catkin build`
0. 说明
本机: ubuntu18.04 x86/64系统
相机: 水星二代 MER
应该也适用于ubuntu的其他版本
大恒相机sdk跟系统有关,可以到官网上下载其他架构(如 arm)
ros驱动包不清楚跟系统有没有关系,目前自己没在arm架构上尝试
1. 安装大恒相机sdk
1.1 下载
官网
下载: Galaxy Linux-x86-Gige-U3 SDK_CN-EN,其他操作系统自己查看
1.2 安装sdk(用于配置ip和调试相机参数)
进入目录/Galaxy_Linux-x86_Gige-U3_32bits-64bits_1.5.2303.9221
chmod +x ./Galaxy_camera.run
./Galaxy_camera.run
依次Enter``Y``Y``E(En是英文,Cn是中文)

需要重启和重新插拔相机
All configurations will take effect after the system is rebooted
If you don't want to reboot the system for a while
you will need to unplug and replug the camera.
(1) 电脑网卡配置(网卡固定ip)
本机以太网网卡名称: enp3s0
本机有线ip地址为 192.168.1.102
sudo ifconfig enp3s0 192.168.1.102 netmask 255.255.255.0
先修改相机ip
cd /home/meng/ivrc/daheng_ws/Galaxy_Linux-x86_Gige-U3_32bits-64bits_1.5.2303.9221/Galaxy_camera/bin
./GxGigeIPConfig
点击自动配置ip后,ip会配置在一个网段,然后可以手动修改ip,这里修改为192.168.1.108
注意可访问状态变成可读和可写即为成功

(2)查看相机图像以及配置相机参数
cd /home/meng/ivrc/daheng_ws/Galaxy_Linux-x86_Gige-U3_32bits-64bits_1.5.2303.9221/Galaxy_camera/bin
./GalaxyView
会有下面的failed,但不影响



2. 安装ros驱动包(注:大恒相机官方没ros驱动)
2.0 正确流程
需要额外下载rm_control包以及替换https://github.com/qiayuanliao/galaxy_camera中建议的catkin_make
为catkin build
创建工作空间,在src里面下载:https://github.com/qiayuanliao/galaxy_camera
mkdir -p galaxy_camera_ws/src
cd galaxy_camera_ws/src
git clone https://github.com/qiayuanliao/galaxy_camera.git
git clone https://github.com/rm-controls/rm_control.git
cd ..
catkin build
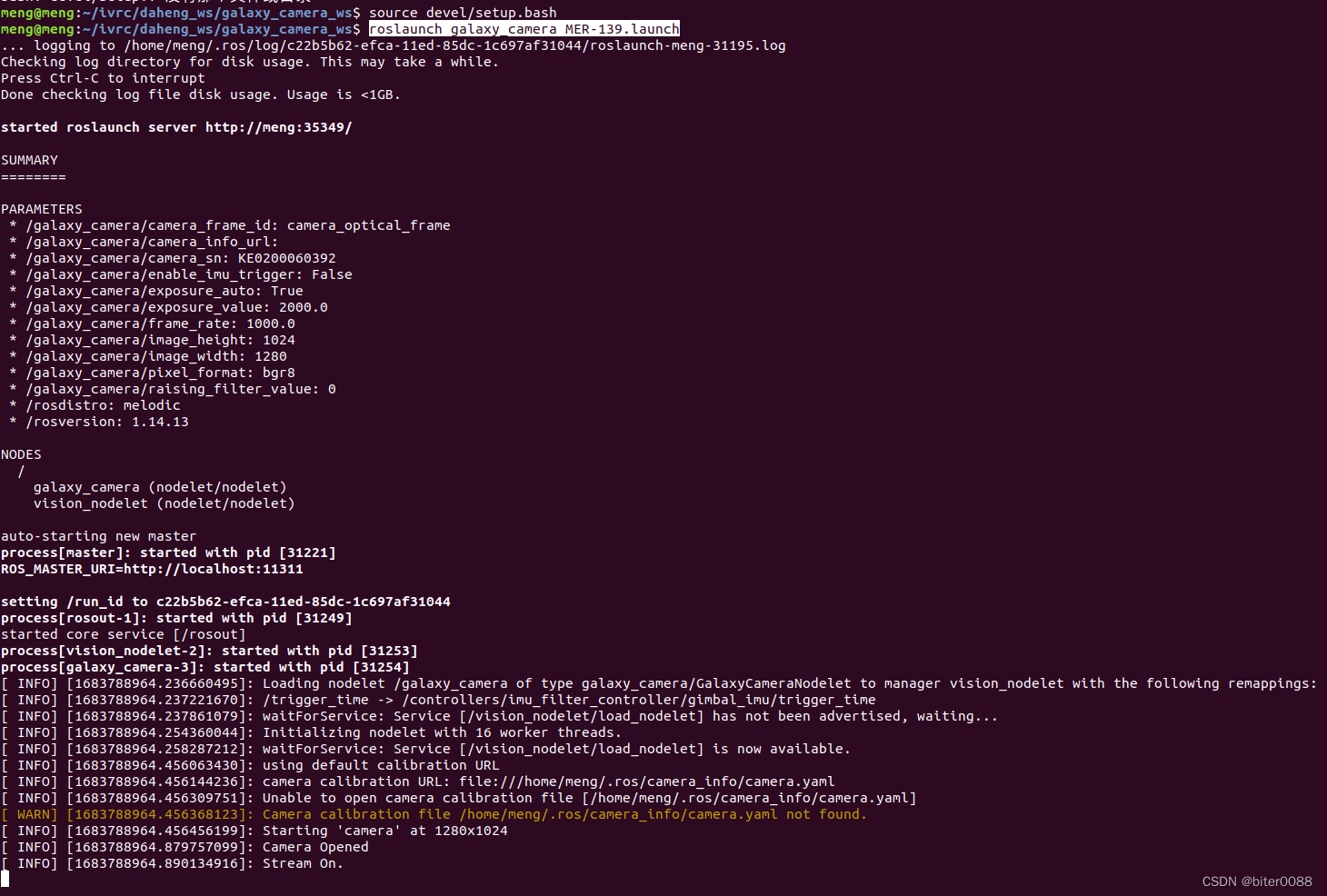
source devel/setup.bash
roslaunch galaxy_camera MER-139.launch
 另起终端查看图像话题
另起终端查看图像话题rosrun rqt_image_view rqt_image_view,这里比较模糊,需要在前面1.2 (2)里面调整相机参数

2.1 错误示范
创建工作空间,在src里面下载:https://github.com/qiayuanliao/galaxy_camera
mkdir -p galaxy_camera_ws/src
cd galaxy_camera_ws/src
git clone https://github.com/qiayuanliao/galaxy_camera
cd ..
catkin_make
2.1 报错1–缺包
Could not find a package configuration file provided by "rm_msgs" with any
of the following names:
rm_msgsConfig.cmake
rm_msgs-config.cmake
缺少包,到https://github.com/rm-controls/rm_control下载,并放在src目录下面
cd galaxy_camera_ws/src
git clone https://github.com/rm-controls/rm_control.git
cd ..
catkin_make
2.2 报错2–包编译顺序问题,改catkin_make为catkin build
galaxy_camera/include/galaxy_camera.h:16:10: fatal error: rm_msgs/EnableImuTrigger.h: 没有那个文件或目录
到https://github.com/rm-controls/rm_control,查看EnableImuTrigger是一个文件还是生成的文件


如上图,发现确实在rm_msgs包编译时生成了EnableImuTrigger.h;上述报错应该是有与包的编译顺序问题,需要先编译rm_msgs,再编译galaxy_camera
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)