[文末提供原文PDF免费下载(期刊论文版式)]
混沌无形
混沌系统是世界本质,无形之中存在规律。机器人智能化发展从线性过渡到混沌,本号将分享机器人全栈技术(感知、规划、控制;软件、机械、硬件等)。
43篇原创内容
公众号
摘要:本文先描述了全向轮的构型及基本特点,接着对单个全向轮进行了受力分析,指出了电机转矩与全向轮所受分力的关系,并在此基础上分析了全向轮纵向分速度与电机输出转速之间的关系,给出速度分解方程;最后,总结分析了全向轮的在实际使用过程中的特点及问题。
01

引言

前文《麦克纳姆轮运动特性分析》介绍了麦克纳姆轮的一些特性,本文顺着讲讲全向轮的特性。(感兴趣的读者可以先点击下图链接感受全向轮平台炫酷运动的视频)
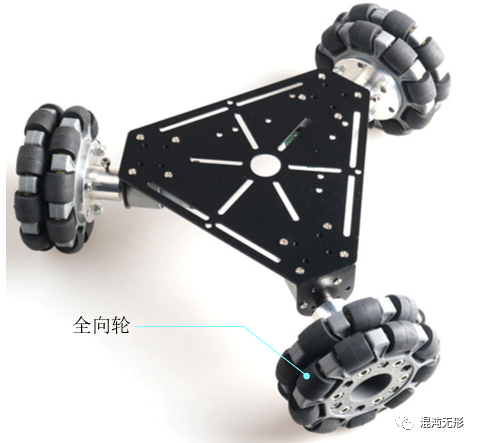
图 1.1 全向轮平台
(视频链接: https://mp.weixin.qq.com/s/BGvZdXA4EpI3QgaTKIe4ew)
比起麦轮平台,全向轮平台不怎么常见,且看起来似乎没有那么“协调”,全向轮平台之所以“长成”这样,主要是依据全向轮本身的运动特性而设计的。
麦轮平台和全向轮平台均能实现前行、横移、斜行、旋转及其组合等多种运动方式。麦轮平台的全向移动效果是通过四个麦克纳姆轮协同转动而达到的,而全向轮移动平台与之类似,也是通过三或四个全向轮协同转动而实现全向移动的,如图 1.1所示。两者最基本的原理是接近的,但又有些许的不同,我们先从两种轮子的构型来分析。
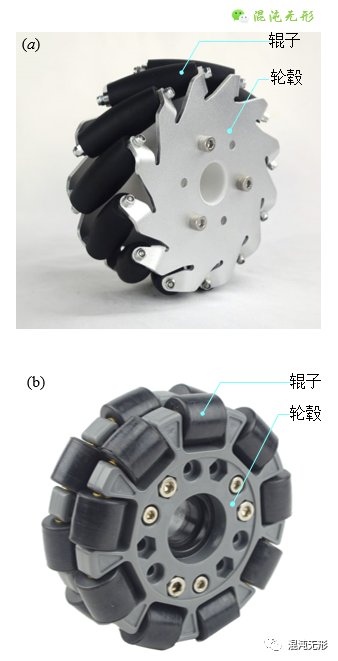
图 1.2 轮. (a)麦克纳姆轮,(b)全向轮
02

全向轮构型分析

如图 1.2所示,麦克纳姆轮和全向轮可以“理解”为化学分子的“同分异构体”,相似的组成,不同的构型。
麦轮的辊子轴线与轮毂轴线夹角一般呈45度,而全向轮的辊子轴线与轮毂轴线呈90度,这是最大的不同之处;而相同之处是:两者的辊子都是被动轮,可以自由绕其轴线转动,轮毂轴线是与电机轴共线的。麦轮可沿着斜向45度滑动,而全向轮则可沿着横向90度滑动。具体可参考《麦克纳姆轮运动特性分析》了解这种轮毂+辊子构型的轮子的原理。
还需要关注的一点是,全向轮一般是有两层的,但不是完全对称的,如图 1.2(b)所示,每层的辊子之间是存在较大间隙的,两层辊子恰好“插空”间隙,以保证全向轮滚动过程中,至少有一个辊子与地面接触。
如图 2.1(a)所示,单层全向轮的辊子之间是不连续的,间距大,而辊子又是圆柱体,所以若是单层全向轮外轮廓可视为多边形,并不是严格意义上的圆形,滚动时存在较大震动。
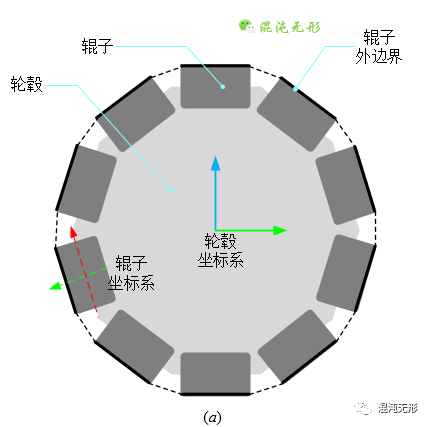
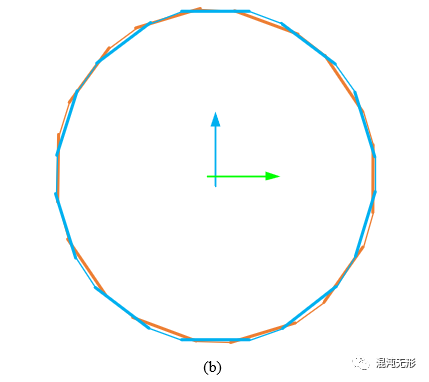
图 2.1 全向轮轮廓.(a)全向轮平面模型, (b)两层全向轮轮廓简化示意图.
故而采用两层全向轮,形成“空缺”互补,如图 2.1(b)所示,能够减小上述间隙引起的问题,因此可以得到推论:全向轮的层数越多,且辊子相互交错排列(越接近圆形轮廓),则间隙引起的震动越小,但全向轮整体厚度也会更大,质量也越大,对电机启动转矩要求也更高。所以,为了平衡震动与厚度,多数全向轮选择了两层。
03

全向轮受力分析
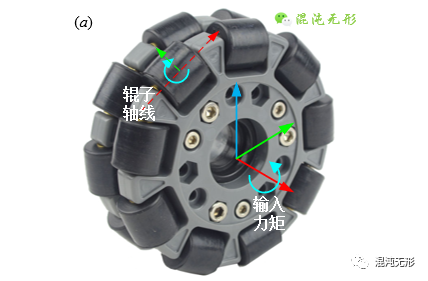
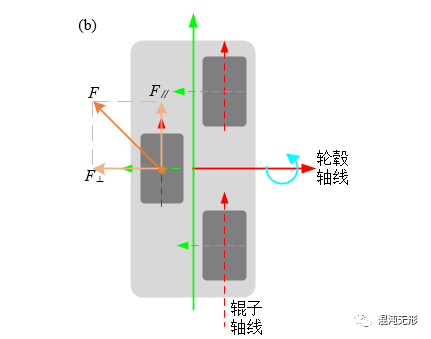
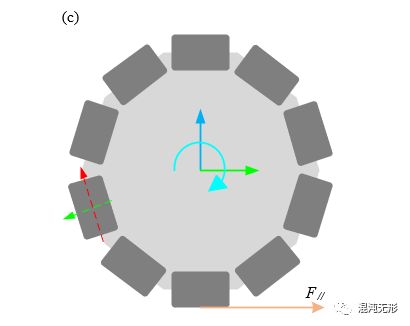
图 3.1 全向轮示意图. (a)全向轮坐标系, (b)全向轮俯视受力分析,(c)全向轮侧视受力分析. 图中坐标系红色表示_x_轴,绿色表示_y_轴,蓝色表示z轴,辊子坐标系用虚线表示,轮毂坐标系用实线表示;黄色箭头表示麦轮和辊子的受力分析;蓝色箭头表示速度方向。
全向轮的受力分析要比麦轮的分析简单许多。从图 3.1(a)中可知,全向轮外围的辊子是与地面接触的,当全向轮绕轮毂轴转动时,辊子会与地面产生摩擦力,具体如图 3.1(b)所示:
辊子受到的合力为F,可沿着辊子坐标系的坐标轴分解为纵向分力F∥和横向分力F⊥。其中,纵向分力F∥是由于电机驱动轮毂转动,如图 3.1(c)所示,轮毂会带动辊子整体绕轮毂轴线转动,辊子与地面接触产生静摩擦,从而驱使全向轮向前运动,这个原理和普通汽车轮胎滚动产生的摩擦比较相似;而横向分力F⊥是由于外力作用下产生的,这个外力可能是来自人为推力,有可能是全向轮平台其他轮子产生的摩擦推力,该横向分力F⊥会促使辊子绕着辊子轴线转动,属于滚动摩擦。整个的分析思路与《麦克纳姆轮运动特性分析》相近,感兴趣的读者可参考这篇文章。
进一步总结:电机输入轮毂的扭矩,全部转化为全向轮沿纵向方向前进的驱动力,这点比麦轮的能效利用率要高,同时全向轮还会受到外部横向推力,进而产生横向运动,横向运动与纵向运动叠加形成全向运动。
04

速度分解

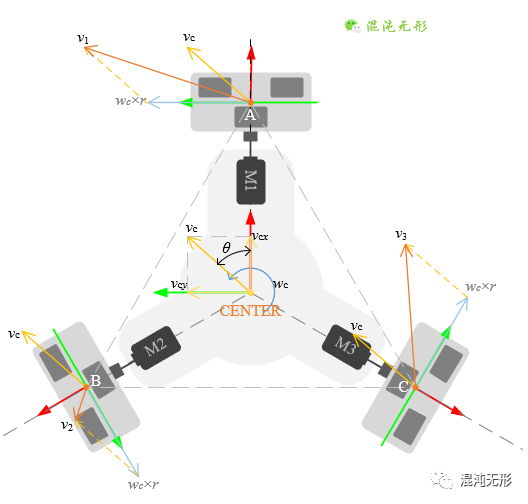
图 4.1 运动分解示意图
如图 4.1所示,将全向轮按照一定排布方式进行配置,就组合为经典的全向轮移动平台,以机器人几何中心为原点建立坐标系,前向运动方向为_x_轴正方向(红色箭头),与之垂直向左为_y_轴正方向(绿色箭头),_z_轴垂直于纸面向外,满足右手定则。速度定义方式与《两轮差速驱动机器人运动模型及应用分析》相似。
而要对全向轮移动平台运动学模型分析的前提是要对全向轮运动的速度进行分析。这里单独将任意轮子作为子系统拿出来分析,具体如图 4.2所示。
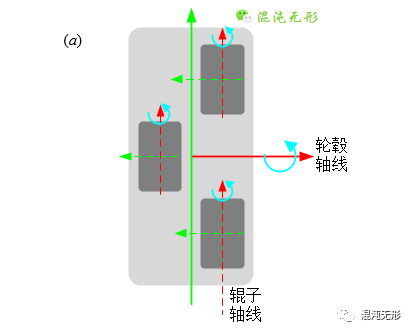
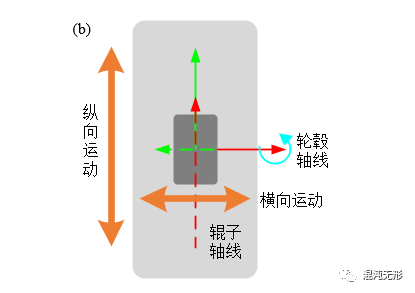

图 4.2 全向轮速度分解. (a)全向轮及其辊子分布示意图,(b)全向轮等效示意图,(c)全向轮速度分解
在理想情况下,可将多层全向轮的运动模型等效为图 4.2(b)中的简化模型,即辊子与轮毂对称,轮毂“负责”纵向运动(属于主动运动),辊子“负责”横向运动(属于被动运动),两种运动合成为全向运动。
以图 4.2(c)为例,_v_表示全向轮在全向平台中的实际运动速度(即图 4.2中的线速度),_v_∥表示全向轮纵向分速度,该速度由于电机驱动直接提供,而v⊥表示横向分速度,是由外部推力产生。
所以,纵向分速度(_v_∥)与电机转速的关系可表示为:
式中,_w_表示轮毂转动的角速度,_R_表示全向轮半径。
进一步分析,从公式(1)可知,当电机转速一定的情况下,纵向分速度(_v_∥)是不变化的,而横向分速度是会发生变化的,当横向分速度被动发生变化,则合速度发生变化,但合速度发生变化的范围如图 4.3所示,范围是图中的蓝色线段。
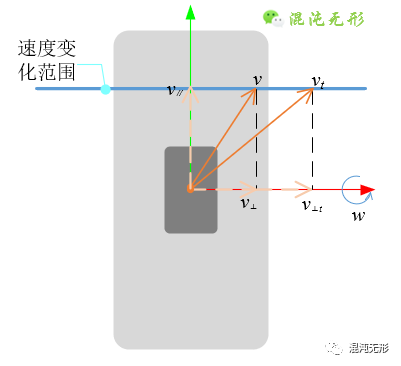
图 4.3 速度变化范围
因此,可以通过控制全向轮平台的轮子以不同的速度旋转,全向轮移动平台便可实现不同的运动效果。
05
结论

总结上述分析,全向轮运动过程中存在较大滚动摩擦,辊子的磨损比普通轮胎严重,因此适用于比较平滑的路面,若遭遇粗糙复杂的地形时耐久性要大打折扣。
全向轮旋转角速度与全向轮的纵向分速度是呈正比关系的,而横向分速度是与外部作用力相关。
此外,由于辊子之间的非连续性,尽管采用两层的全向轮,在运动过程仍存在连续微小震动,这需要设计悬挂机构等辅助机构来消除,也可改变辊子材料属性使得辊子变软来减小震动幅度。单个全向轮的零部件较多,因此生产制造成本也较高。
后面会持续更新全向轮平台运动模型分析,敬请期待。
(文章仅笔者个人分析,有误请指正,谢谢!)
福利放送
笔者为小伙伴们整理了期刊论文版式原文PDF,方便收藏和回味
链接:https://pan.baidu.com/s/1WP_zWEODFxKB-0E_He8xCg
提取码:yvc3
若链接失效,可在后台回复关键字:134641E或发送邮件:Zippen-Huang@outlook.com
延伸阅读
Car-like Robot运动模型及应用分析
麦克纳姆轮全向移动机器人运动模型及应用分析
麦克纳姆轮运动特性分析
四轮驱动(SSMR)移动机器人运动模型及应用分析
履带式机器人运动模型及应用分析
两轮差速驱动机器人运动模型及应用分析
-----------------------------------------------------------------------------
相关声明
1.如果转载本文,文末务必注明:“转自微信公众号:混沌无形”
2.若有侵权,请联系作者

全文完,感谢阅读!!如果觉得写的不错,那就点个赞或者“在看”吧。
混沌无形
混沌系统是世界本质,无形之中存在规律。机器人智能化发展从线性过渡到混沌,本号将分享机器人全栈技术(感知、规划、控制;软件、机械、硬件等)。
43篇原创内容
公众号
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)