simulink搭建简单的陷波滤波器
- 陷波滤波器的设计
- 模型的搭建
- 通过matlab自带软件设计的滤波器与simulink自带滤波器模块对比
陷波滤波器的设计
具体设计方法可参见这篇:算法学习笔记之50HZ陷波滤波器设计
下面给出各个参数
matlab自带滤波器设计工具参数

采用频率为10000Hz ;陷波频率50Hz;
simulink 自带的滤波器模块(second order filter)参数:

模型的搭建

其中用matlab设计的滤波器可以直接导入到simulink中:
file-export to simulink model-realize model
通过matlab自带软件设计的滤波器与simulink自带滤波器模块对比
初始信号
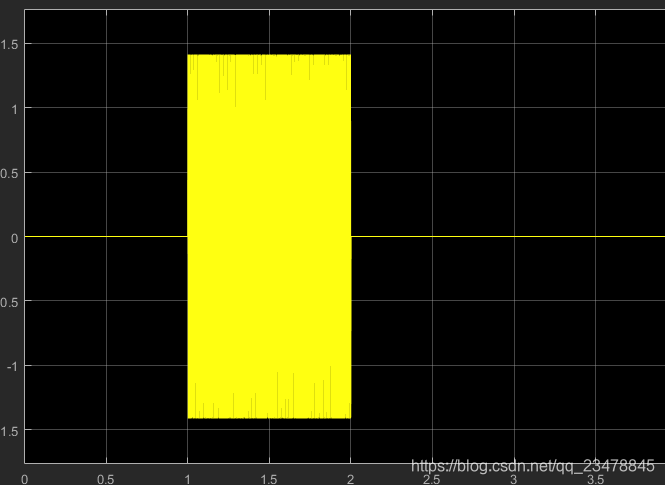
加入50hz噪声信号后

两个滤波器滤波后的波形

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)