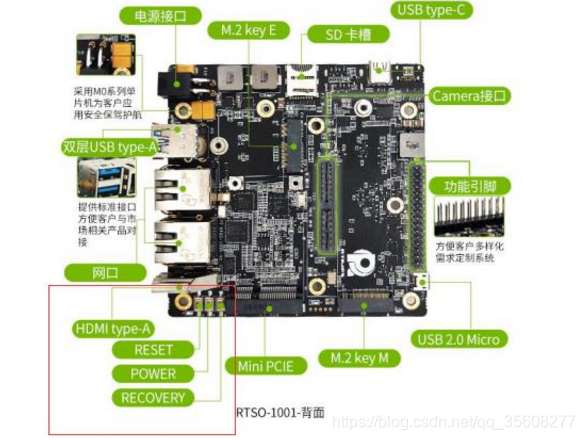
recovery按键长按->reset键按一下->3s后松开recovery键
ubuntu命令行 lsusb
lsusb
Bus 004 Device 001: ID 1d6b:0003 Linux Foundation 3.0 root hub
Bus 003 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
Bus 002 Device 001: ID 1d6b:0003 Linux Foundation 3.0 root hub
Bus 001 Device 003: ID 0955:7019 NVidia Corp.
Bus 001 Device 002: ID 046d:c08b Logitech, Inc.
Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
NVidia Corp
系统文件下载和编译
linux driver package rootfs
解压 Linux Driver Package
$ tar –vxf Tegra186_Linux_R_aarch64.tbz2
生成文件夹目录 Linux_for_Tegra
设置根文件系统
1、 进入 Linux Driver Package 的根文件系统目录
$ cd <your_L4T_root>/Linux_for_Tegra/rootfs
2、 解压 the Root File System 运行:
$ sudo tar -jxpf …/…/Tegra-Linux-Sample-Root-Filesystem_R_aarch64.tbz2
装 BSP 支持包
1、 将 Realtimes-L4T-.tar 包解压到与 Linux_for_Tegra 文件夹同级目录下面,
使用命令:
$ tar -xvf Realtimes-L4T-.tar
2、 进入到 Realtimes-L4T 文件夹, 运行
$ sudo ./install.sh
安装成功, 会有 success 提示!
3、 运行 apply_binaries.sh 脚本拷贝 NVIDIA 用户空间库进入目标文件系统
$ cd …/Linux_for_Tegra/
$ sudo ./apply_binaries.sh
sudo ./flash.sh rtso-1001 mmcblk0p1
ls
[ 270.1376 ] tegradevflash_v2 --write MEM_BCT_b mem_coldboot_sigheader.bct.encrypt
[ 270.1404 ] Bootloader version 01.00.0000
[ 270.1431 ] Writing partition MEM_BCT_b with mem_coldboot_sigheader.bct.encrypt
[ 270.1443 ] [................................................] 100%
[ 270.1607 ]
[ 270.1608 ] Flashing completed
[ 270.1609 ] Coldbooting the device
[ 270.1637 ] tegrarcm_v2 --ismb2
[ 270.1892 ]
[ 270.1921 ] tegradevflash_v2 --reboot coldboot
[ 270.1948 ] Bootloader version 01.00.0000
[ 270.2181 ]
*** The target t186ref has been flashed successfully. ***
Reset the board to boot from internal eMMC.
启动agx xavier
P10口接鼠标键盘hub,P2接hdmi输出显示器
接通电源,可以启动了!
开机设置风扇进行散热
1、开启风扇,执行 /usr/bin/jetson_clocks
2、设置风扇速度
echo <PWM_duty_cycle> > /sys/devices/pwm-fan/target_pwm
Where <PWM_duty_cycle> is a value in the range [0,255]
3、查看当前风扇设置
cat /sys/devices/pwm-fan/target_pwm
sudo nvpmodel --query #查看当前的模式,默认为2, 功耗15W
sudo nvpmodel -m 0 #设置满功率运行,MAX
sudo ~/jetson_clocks.sh #强制风扇启
sudo jetson_clocks --show #查看设置
sudo jetson_clocks --store #把设置值保存到 /home/用户名/l4t_dfs.conf
sudo gedit /home/用户名/l4t_dfs.conf
#在l4t_dfs.conf最后面加入下面这段,速度(0-250)
/sys/devices/pwm-fan/target_pwm:200 #200的转速不会太吵而且散热也快
sudo jetson_clocks --restore #执行完这个命令就可以开启风扇
#设置开机自动开启风扇
sudo gedit ~/.bashrc
#在最后面插入下面这个命令
sudo jetson_clocks --restore
可按reset键盘重启
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)