Python
Java
PHP
IOS
Android
Nodejs
JavaScript
Html5
Windows
Ubuntu
Linux
vscode 配置头文件路径
2023-05-16
1、打开 VSCode 界面,在左下角找到齿轮(打开设置),点击配置文件。
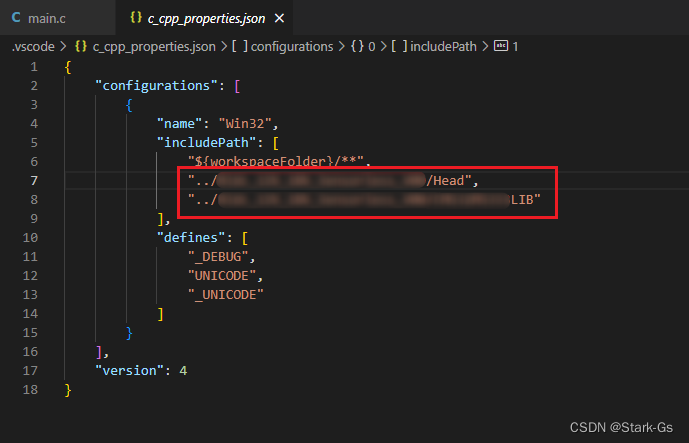
2、在配置文件中添加相应的头文件路径
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)
vscode 配置头文件路径 的相关文章
【笔记】MS5837-30BA压力传感器调试笔记
文章目录 一 MS5837 30BA相关介绍1 技术参数2 典型应用电路3 PROM中的标定参数 二 MS5837 30BA数据解算1 解算流程图2 初始化读取标定参数并进行CRC校验 MS5837复位 MS5837 CRC4 bit 校验
【通信协议】1-Wire 单总线
文章目录 一 1 Wire相关介绍1 典型命令序列 xff1a 2 典型电路图 xff1a 二 1 Wire通信过程1 初始化2 写操作3 读操作 三 1 Wire程序 xff08 以DS18B20为例 xff09 DS18B20功能命令
linux 安裝mitmproxy
1 安装mitmproxy sudo apt install python3 pip amp amp sudo pip3 install U pip amp amp sudo pip3 install mitmproxy 接下来需要安装证书
C++ 多态性的一些个人总结
关于继承 xff1a public继承 xff0c 和其它两种继承方式 xff0c 子类对象可以访问基类的Public成员 xff0c 保护成员和私有成员只能在子类中访问 xff0c 而不能由子类对象进行访问 关于虚函数 xff08 每个虚
ubuntu用Dockerfile配置ros+cuda+torch镜像及rviz可视化
dockerfile配置ros 43 cuda 43 torch镜像及rviz可视化 Dockerfile创建容器 Dockerfile 因工作环境 xff0c 需要有深度学习的那一套环境 xff0c 还要用到一些可视化的东西 xff0c
简单理解TCP/IP协议栈
协议定义的是一系列的通信标准 xff0c 通信双方需要共同按照这一标准进行正常的数据收发 xff1b 信的双方需要共同按照这一个标准进行正常的数据收发 xff1b xff08 两人 xff0c 说共同的语言 xff0c 不然不能交流 xff
ubuntu查看系统版本和linux内核版本
lsb release a No LSB modules are available Distributor ID Ubuntu Description Ubuntu span class token number 18 04 span 5
电路设计——教你如何阅读数据手册
我们为什么要看数据手册 xff0c 数据手册又有什么作用呢 xff1f 我们能够从中得到哪些东西呢 xff1f 哪些是我们所需要的呢 xff1f 下面我们以AD847芯片为例来说一说我们在工作中以及设计中需要注意哪些方面 下面是芯片的数据手
ORB-SLAM3笔记(编译、踩坑、论文、看代码)
目前基于orb slam想做的方向 提升动态建图精度 xff08 东西Map就是上不去 KITTI有几个groundtruth官网下架了找不到而且 红外相机退化环境下的点线融合 数据集https sites google com view
【树莓派】Ubuntu-mate安装及ROS安装
树莓派使用之Ubuntu mate 烧录镜像至SD卡下载镜像烧录SD卡 将SD插入树莓派实物GIF安装流程 树莓派开机sudo reboot换源下载SSH首先得下载net tools下载openssh 电脑远程操作下载 Xshell设置远程
【SLAM】ORB_SLAM3 初步调试运行详细记录
前言 相关解析及参考 xff1a 超详细解读ORB SLAM3单目初始化 xff08 下篇 xff09 ORB SLAM3和之前版本有什么不同 xff1f 小白学视觉的技术博客 51CTO博客 orbslam3 官方源码地址 xff1a h
如何实现一个简单的Ubuntu远程虚拟桌面
文章目录 前言一 什么是noVNC xff1f 二 如何部署1 安装VNC服务端1 1 安装tigervnc standalone server1 2 安装tigervnc standalone server1 3 安装xserver xo
软件开发经验总结 读源代码的艺术
读取源代码是每一个开发人员成长的必经之路 xff0c 一份优秀的源代码 xff0c 是作者多年开发技术的心血结晶 xff0c 研究一份优秀的源代码 xff0c 总是能够让你的技术得到一定程度的提升 然后 xff0c 读别人的源代码并不是拿着
vsCode用户设置vue.js、保存格式化代码
34 window zoomLevel 34 0 34 workbench iconTheme 34 34 vscode icons 34 34 editor wordWrap 34 34 on 34 vscode默认启用了根据文件类型自动
PX4姿态控制算法分析
PX4姿态控制流程图 图片来源 Px4的姿态控制分为角度环 外环 和角速度环 内环 xff0c 角度环使用P控制 xff0c 角速度环使用PID控制 xff0c 由于偏航通道响应较慢 多旋翼飞行器的俯仰和滚转运动由旋翼的升力力矩产生 xff
滤波器的设计(一)
滤波器的设计 引言 对实际的控制系统而言 xff0c 采集到的原始信号往往是有噪声的 xff0c 而噪声往往会对系统的稳定性能产生隐患 xff1b 或为了提取有用的控制信号 xff0c 滤除不必要的频域成分 xff0c 数字滤波技术必不可少
算法
算法 xff08 Algorithm xff09 xff1a 计算机解题的基本思想方法和步骤 算法的描述 xff1a 是对要解决一个问题或要完成一项任务所采取的方法和步骤的描述 xff0c 包括需要什么数据 xff08 输入什么数据 输出什
延迟环节对控制系统的影响
本文内容来自知乎浅谈控制器的增益大小 xff08 下 xff09 区分惯性环节与延迟环节 惯性环节 1 T s 43
控制系统中"带宽"的理解
本文来自对知乎文章如何入门自动控制的一些理解 首先来看几个概念 xff1a 带宽频率也称为闭环截止频率 xff0c 是指当闭环幅频特性下降到频率为零时的分贝值以下3dB时 xff0c 对应的频率 xff0c 记作 w b w b w b 开
多旋翼无人机建模-牛顿欧拉法
多旋翼无人机建模 建模之前我们先分析一下多旋翼无人机有哪些状态量 xff1a 用于表示线运动的三轴位置 速度和加速度 xff1b 用于表示角运动的三轴姿态角和姿态角速度 xff1b 这一共是15个状态量 首先来看线运动方程的建立过程 xff
随机推荐
基于最小二乘法的磁力计椭球拟合方法
基于最小二乘法的磁力计椭球拟合方法 在写飞控代码时 xff0c 必然要对磁力计的测量数据进行校正 xff0c 本文将介绍一种简单实用的校正方法 基于最小二乘法的椭球拟合方法 本文椭球拟合部分来自博文IMU加速度 磁力计校正 xff0d xf
多旋翼无人机飞控系统设计之详细设计方案
在进行多旋翼无人机飞控系统设计之前 xff0c 有必要列写一份详细的设计方案书 xff1b 这是飞控系统设计的基石 xff0c 并且在一定程度上指导了后续的研发工作 本篇博文列写了之前笔者在进行无人机飞控开发过程中所撰写的精简版本的设计方案
梅森公式确定系统的传递函数
梅森增益公式 xff1a 对于一些比较复杂的系统 xff0c 采用结构图等效简化的方法求系统的传递函数是比较麻烦的 而使用梅森公式 xff0c 则可以不用做任何变换 xff0c 只要通过对信号流图进行相应的分析就能直接写出系统的传递函数 下
多旋翼无人机控制之完整闭环控制设计
本文主要讲解了多旋翼无人机整个闭环系统的设计流程 xff0c 对各个控制器的控制输入与输出 xff0c 控制器的设计要点进行了详细描述 控制逻辑 Q 要让多旋翼无人机按照预设的航线进行飞行 xff0c 需要设计哪些控制器呢 xff1f A
频域分析之超前校正
本文将主要介绍使用频域响应法进行控制器设计时一种常用且重要的方法 超前校正 超前校正能使系统的瞬态响应得到显著改善 xff0c 而对系统稳态精度的影响则很小 首先来看超前校正的一般形式 K c T
飞控中的一些知识点总结
本文主要总结了飞控研发过中一些比较重要的知识点 xff0c 部分为本人的实际经验 xff0c 部分为知乎转载 影响飞控性能的一些因素 xff1a 飞控姿态控制算法比较固定 xff0c 基本上都是角度环和角速度环组成的串级PID算法 xff0
STM32内存管理以及堆和栈的理解
今天仔细读了一下内存管理的代码 xff0c 然后还有看了堆栈的相关知识 xff0c 把以前不太明白的一些东西想通了 xff0c 写下来 xff0c 方便以后查看 xff0c 也想大家看了能指出哪里不对 xff0c 然后修改 首先 xff0c
卡尔曼滤波器原理简介
引用知乎中的一段话 xff1a PID和卡尔曼滤波乃是控制工程师的两大法宝 几十年过去了卡尔曼滤波在理论研究上仍然保持着活跃 xff0c 研究方向包括各种非线性的 xff0c 噪声统计参数未知的自适应和鲁棒滤波 更重要的是现在计算机的发展将
傅里叶变换
此篇博文主要简述傅里叶变换的相关概念以及如何代码实现离散序列的傅里叶变换 傅里叶变换的一般形式 我们都知道 xff0c 傅里叶变换是频域分析的重要工具 xff1b 其将信号从时域转换到了频域 xff0c 以更直观的角度向我们展示了信号的本质
开源AR库ArUco的原理与位姿估计实战
近期在搭建SLAM AR的过程中 xff0c 需要用到Marker作为虚拟坐标系的参考 xff0c 使用了开源库ArUco实现了该功能 本文最早发布于keenster cn 参考文献 ArUco marker detection aruco
k8s基础认知
一 什么是k8s xff1a k8s是一个使用go编写的谷歌内部容器管理系统的开源版 xff0c 他由CNCF基金会进行管理 版本叠代周期为三个月 二 k8s的基本概念 1 cluster xff1a 是计算 存储 网络的资源集合 k8s利
CodeWarrior 10.7 使用笔记
1 Code Warrior 10 7 IDE 工程创建 利用工程向导快速创建工程 1 1 点击菜单File BareBoard Project 裸板工程 1 2 设置工程名称 xff08 默认将该工程创建在当前工作空间 xff08 wor
LADRC_C代码
ifndef ADRC H define ADRC H include stm32f10x h typedef struct ADRC float v1 v2 最速输出值 float r 速度因子 float h 步长 float z1 z
SBUS 协议
简介 全称是Serial Bus S BUS是一个串行通信协议 xff0c S BUS是FUTABA提出的舵机控制总线 xff0c S bus使用RS232C串口的硬件协议作为自己的硬件运行基础 使用TTL电平 xff0c 即3 3V 使用
无人机飞控 ardupilot-4.0.7 版本源码总体框架
无人机飞控 ardupilot 4 0 7 版本源码总体框架 无人机飞控 ardupilot 4 0 7 版本源码总体框架 基本结构 最外层文件 无人机飞控 ardupilot 4 0 7 版本源码总体框架 基本结构 最外层文件 文件名 内
C/C++函数注释格式
目录 C C 43 43 函数注释格式函数注释格式1函数注释格式2函数注释格式3函数注释格式4函数注释格式5 C C 43 43 函数注释格式 函数注释格式1 span class token comment 61 61 61 61 61
磁编码器MT6835_SPI读取位置信息
文章目录 磁编码器MT6835 SPI读取位置信息简介应用特性和优势参考资料Cubemx 创建 STM32 工程读取编码器位置信息添加 SPI 读取位置信息代码编码器位置信息输出 磁编码器MT6835 SPI读取位置信息 简介 MT6835
四旋翼无人机飞控系统设计(方案篇)
简介 四旋翼无人机为多旋翼无人机中最经典的机型 xff0c 此设计为四旋翼无人机飞控系统设计 xff08 侧重软件 xff09 xff0c 这里主要涉及基于MCU的无人机飞控程序的编写 xff0c 使用的无人机机架 电机 电调 锂电池 航模
运算放大器-虚短虚断
运算放大器 虚短虚断 虚短虚断 虚短 虚短指在理想情况下 xff0c 两个输入端的电位相等 xff0c 就好像两个输入端短接在一起 xff0c 但事实上并没有短接 xff0c 称为 虚短 虚短的必要条件是运放引入深度负反馈 V 43 61
vscode 配置头文件路径
1 打开 VSCode 界面 xff0c 在左下角找到齿轮 打开设置 xff0c 点击配置文件 2 在配置文件中添加相应的头文件路径
热门标签
squarewire
pagetables
pinax
beforesave
hwnd
vitess
datepart
gsmcomm
phpspec
rangemap
2digityear
oracleadf
ogc
solar
jexcelapi
webaddress