将状态重新排序:
x
1
=
x
,
x
2
=
y
,
x
3
=
θ
˙
,
x
4
=
y
˙
x1 = x,x2=y, x3 = \dot θ,x4= \dot y
x1=x,x2=y,x3=θ˙,x4=y˙ 系统输出为:
y
=
[
θ
y
]
y=\begin{bmatrix} \theta \\ y\\ \end{bmatrix}
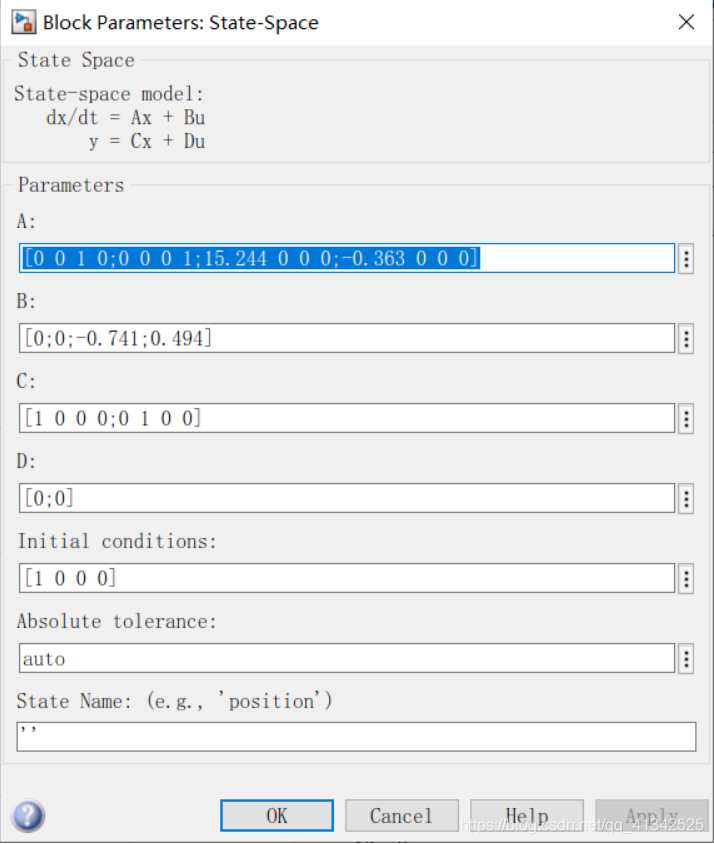
y=[θy] 状态矩阵变为:
A
=
[
0
0
1
0
0
0
0
1
15.244
0
0
0
−
0.363
0
0
0
]
B
=
[
0
0
−
0.741
0.494
]
C
=
[
1
0
0
0
0
1
0
0
]
A=\begin{bmatrix}0 & 0&1&0 \\ 0 & 0&0&1\\15.244&0&0&0\\-0.363&0&0&0 \end{bmatrix} B=\begin{bmatrix}0 \\ 0 \\-0.741\\0.494 \end{bmatrix} C=\begin{bmatrix}1 & 0&0&0 \\ 0 &1&0&0 \end{bmatrix}
A=⎣⎢⎢⎡0015.244−0.363000010000100⎦⎥⎥⎤B=⎣⎢⎢⎡00−0.7410.494⎦⎥⎥⎤C=[10010000]
降维观测器设计思路:
首先判断系统的能观性:
R
a
n
k
Q
c
=
[
C
C
A
C
A
2
C
A
3
]
=
4
Rank Qc = \begin{bmatrix}C \\ CA\\CA^2\\CA^3 \end{bmatrix}=4
RankQc=⎣⎢⎢⎡CCACA2CA3⎦⎥⎥⎤=4 系统完全能观,确保可以设计降维状态观测器来观测状态。
期望特征方程为:
λ
2
+
20
λ
+
100
=
0
\lambda^2+20\lambda+100=0
λ2+20λ+100=0 观测器特征方程为:
d
e
t
(
s
I
−
A
‾
22
+
H
‾
A
‾
12
)
=
s
2
+
(
H
11
+
H
22
)
s
+
H
11
H
22
−
H
21
H
22
=
0
det(sI-\overline A_{22}+\overline H\overline A_{12})=s^2+(H_{11}+H_{22})s+H_{11}H_{22}-H_{21}H_{22}=0
det(sI−A22+HA12)=s2+(H11+H22)s+H11H22−H21H22=0
不妨使:
H
21
=
0
,
H
22
=
0
,
H
11
=
H
22
H_{21}=0,H_{22}=0,H_{11}=H_{22}
H21=0,H22=0,H11=H22 比较系数,得:
H
11
=
10
,
H
22
=
10
H_{11}=10,H_{22}=10
H11=10,H22=10 子系统的观测器为:
{
z
˙
=
[
−
10
0
0
−
10
]
x
^
2
+
[
−
0.741
0.494
]
u
+
[
15.244
0
−
0.363
0
]
y
x
^
2
=
z
+
[
10
0
0
10
]
y
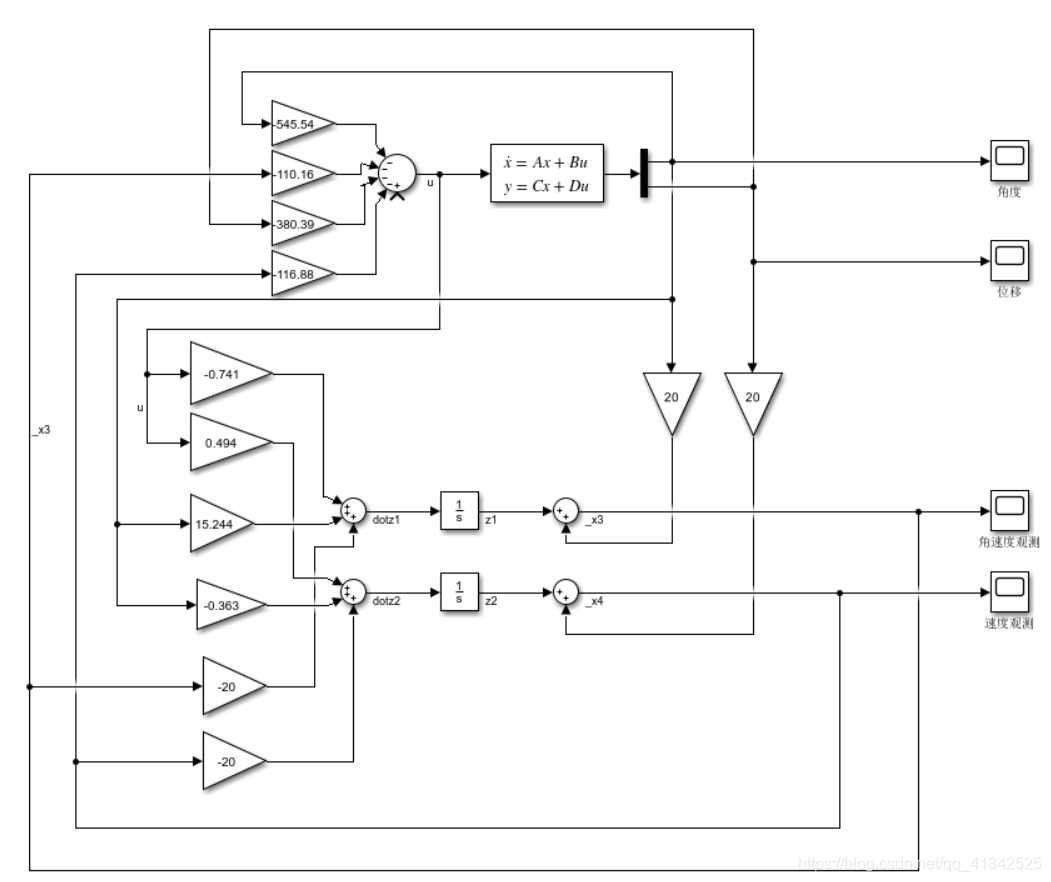
\begin{cases} \dot z=\begin{bmatrix} -10&0 \\0&-10 \end{bmatrix}\hat x_2+\begin{bmatrix} -0.741 \\0.494 \end{bmatrix}u+\begin{bmatrix}15.244&0 \\-0.363&0\end{bmatrix}y\\ \hat x_2=z+\begin{bmatrix} 10&0\\0&10 \end{bmatrix}y \end{cases}
⎩⎪⎪⎨⎪⎪⎧z˙=[−1000−10]x^2+[−0.7410.494]u+[15.244−0.36300]yx^2=z+[100010]y
原系统的状态观测量为:
x
^
=
[
y
x
^
2
]
,
y
=
[
x
1
x
2
]
=
[
θ
y
′
]
\hat x=\begin{bmatrix}y\\\hat x_2\end{bmatrix},y=\begin{bmatrix} x_1\\x_2 \end{bmatrix}=\begin{bmatrix} \theta\\y^{'} \end{bmatrix}
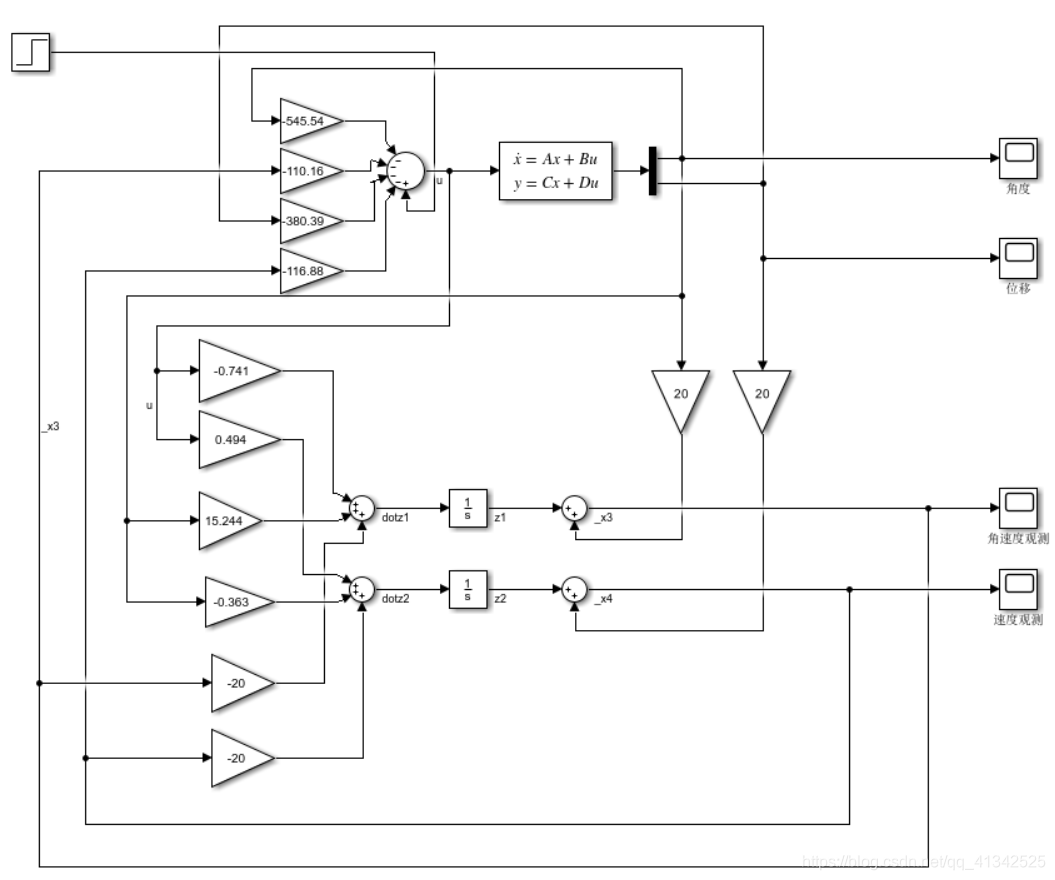
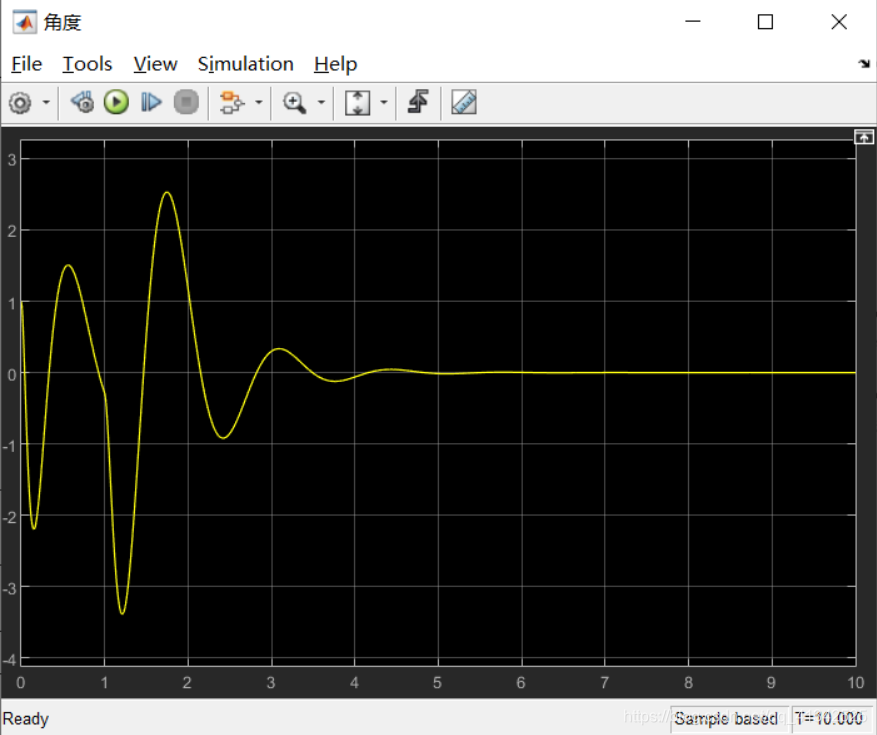
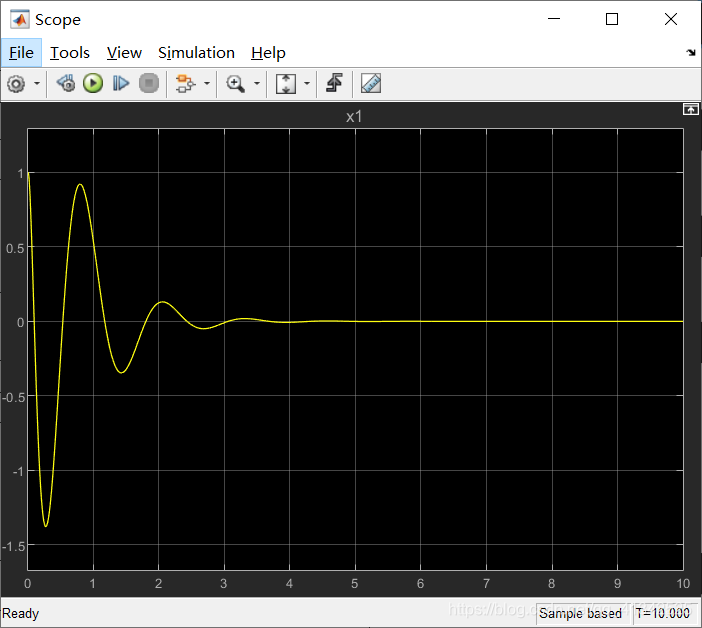
x^=[yx^2],y=[x1x2]=[θy′] 于是我们便构建了x3、x4,即两个不可测量的速度的观测值。






















![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Ma4KziYv-1590985727990)(C:\Users\hp\AppData\Roaming\Typora\typora-user-images\image-20200525170331331.png)]](https://img-blog.csdnimg.cn/20200601123006150.png)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-mhKzq5aO-1590985727998)(C:\Users\hp\AppData\Roaming\Typora\typora-user-images\image-20200531233309196.png)][外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-0acABmru-1590985728000)(C:\Users\hp\AppData\Roaming\Typora\typora-user-images\image-20200531233355203.png)][外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-cvb2jLCC-1590985728000)(C:\Users\hp\AppData\Roaming\Typora\typora-user-images\image-20200601084105169.png)]](https://img-blog.csdnimg.cn/20200601123049630.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3FxXzQxMzQyNTI1,size_16,color_FFFFFF,t_70)