在搭建完机器人小车的模型之后,需要向其添加传感器,以便提取传感器的数据,进行后续的工作。
一、相机
1.添加camera_gazebo.xacro文件
同添加机器人模型一样,添加一个相机也需要进行定义一个相机的结构,参数,功能的“类”,也就是camera.xacro文件,在总的调用文件“shcRobot2_xacro_camera_gazebo.xacro”中调用即可。具体代码来源于参考文献1
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="camera">
<xacro:macro name="usb_camera" params="prefix:=camera">
<!-- Create laser reference frame -->
<link name="${prefix}_link">
<inertial>
<mass value="0.1" />
<origin xyz="0 0 0" />
<inertia ixx="0.01" ixy="0.0" ixz="0.0"
iyy="0.01" iyz="0.0"
izz="0.01" />
</inertial>
<visual>
<origin xyz=" 0 0 0 " rpy="0 0 0" />
<geometry>
<box size="0.01 0.04 0.04" />
</geometry>
<material name="black"/>
</visual>
<collision>
<origin xyz="0.0 0.0 0.0" rpy="0 0 0" />
<geometry>
<box size="0.01 0.04 0.04" />
</geometry>
</collision>
</link>
<gazebo reference="${prefix}_link">
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="${prefix}_link">
<sensor type="camera" name="camera_node">
<update_rate>30.0</update_rate>
<camera name="head">
<horizontal_fov>1.3962634</horizontal_fov>
<image>
<width>1280</width>
<height>720</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.02</near>
<far>300</far>
</clip>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.007</stddev>
</noise>
</camera>
<plugin name="gazebo_camera" filename="libgazebo_ros_camera.so">
<alwaysOn>true</alwaysOn>
<updateRate>0.0</updateRate>
<cameraName>/camera</cameraName>
<imageTopicName>image_raw</imageTopicName>
<cameraInfoTopicName>camera_info</cameraInfoTopicName>
<frameName>camera_link</frameName>
<hackBaseline>0.07</hackBaseline>
<distortionK1>0.0</distortionK1>
<distortionK2>0.0</distortionK2>
<distortionK3>0.0</distortionK3>
<distortionT1>0.0</distortionT1>
<distortionT2>0.0</distortionT2>
</plugin>
</sensor>
</gazebo>
</xacro:macro>
</robot>
2.调用camera_gazebo.xacro文件生成总模型
在下面的总调用文件“shcRobot2_xacro_camera_gazebo.xacro”中,除了要引用camera.xacro文件,还要记得定义camera和base_link的连接节点的位置和属性。
<?xml version="1.0"?>
<robot name="arm" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="$(find shcrobot_description)/urdf/xacro/shcRobot2_base_gazebo.xacro"/>
<xacro:include filename="$(find shcrobot_description)/urdf/xacro/camera_gazebo.xacro"/>
<xacro:property name="camera_offset_x" value="0.3" />
<xacro:property name="camera_offset_y" value="0" />
<xacro:property name="camera_offset_z" value="0.14" />
<robot_base/>
<!-- Camera -->
<joint name="camera_joint" type="fixed">
<origin xyz="${camera_offset_x} ${camera_offset_y} ${camera_offset_z}" rpy="0 0 0" />
<parent link="base_link"/>
<child link="camera_link"/>
</joint>
<xacro:usb_camera prefix="camera"/>
</robot>
3.修改相应launch文件,启动仿真
<launch>
<!-- 设置launch文件的参数 -->
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!--运行gazebo仿真环境-->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- 加载机器人模型描述参数 -->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find shcrobot_description)/urdf/xacro/shcRobot2_xacro_camera_gazebo.xacro'"/>
<!--运行joint_state_publisher节点,发布机器人关节状态-->
<node name = "robot_state_publisher" pkg = "robot_state_publisher" type = "state_publisher">
<param name="publish_frequency" type="double" value="20.0" />
</node>
<!-- 在gazebo中加载机器人模型-->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model shcrobot -param robot_description"/>
</launch>
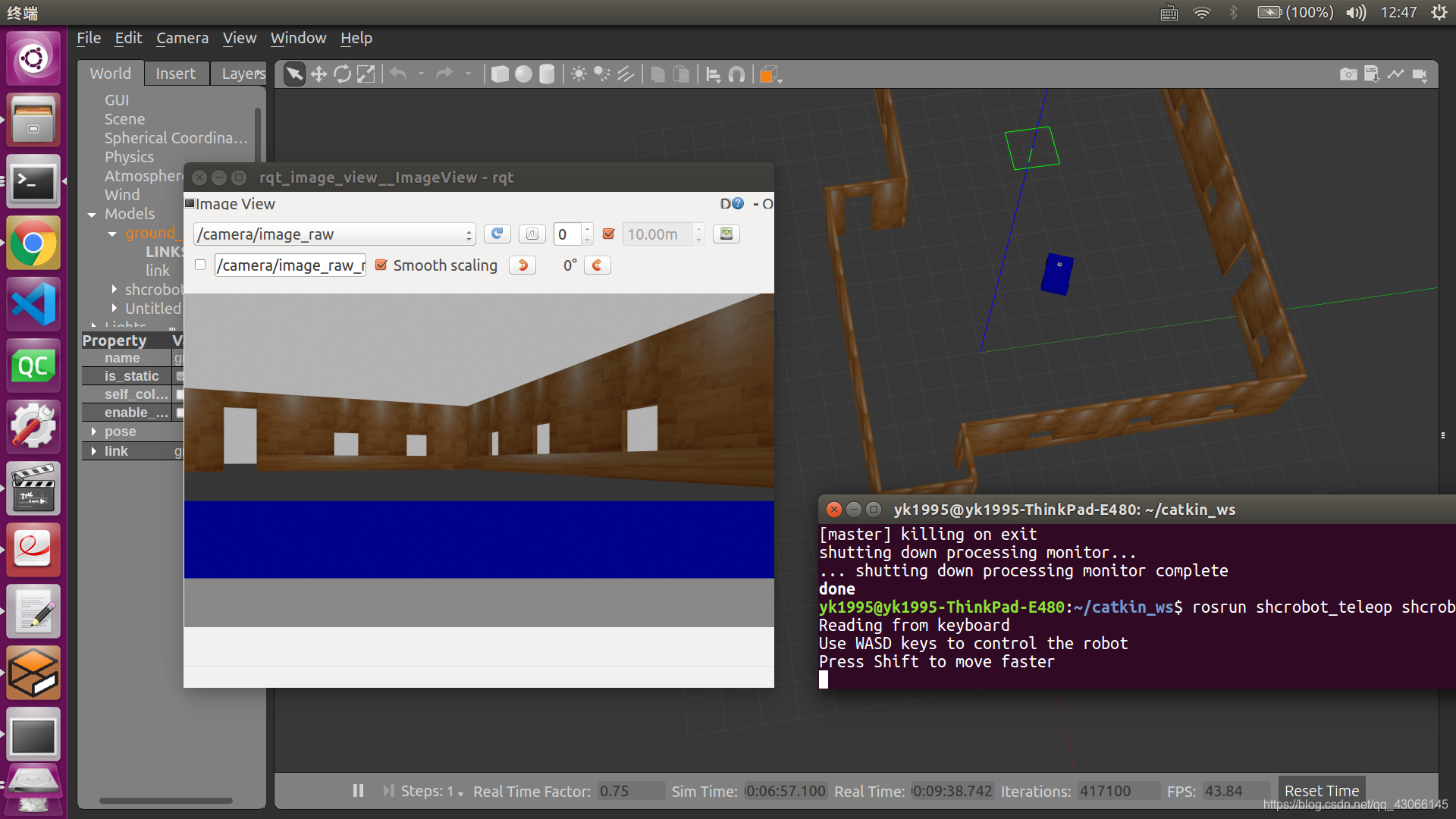
启动键盘控制节点和rqt_image_view节点,可以输出相机的画面
2.激光雷达
1.添加lidar_gazebo.xacro文件
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="laser">
<xacro:macro name="rplidar" params="prefix:=laser">
<!-- Create laser reference frame -->
<link name="${prefix}_link">
<inertial>
<mass value="0.1" />
<origin xyz="0 0 0" />
<inertia ixx="0.01" ixy="0.0" ixz="0.0"
iyy="0.01" iyz="0.0"
izz="0.01" />
</inertial>
<visual>
<origin xyz=" 0 0 0 " rpy="0 0 0" />
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
<material name="black"/>
</visual>
<collision>
<origin xyz="0.0 0.0 0.0" rpy="0 0 0" />
<geometry>
<cylinder length="0.06" radius="0.05"/>
</geometry>
</collision>
</link>
<gazebo reference="${prefix}_link">
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="${prefix}_link">
<sensor type="ray" name="rplidar">
<pose>0 0 0 0 0 0</pose>
<visualize>false</visualize>
<update_rate>5.5</update_rate>
<ray>
<scan>
<horizontal>
<samples>360</samples>
<resolution>1</resolution>
<min_angle>-3</min_angle>
<max_angle>3</max_angle>
</horizontal>
</scan>
<range>
<min>0.10</min>
<max>6.0</max>
<resolution>0.01</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<plugin name="gazebo_rplidar" filename="libgazebo_ros_laser.so">
<topicName>/scan</topicName>
<frameName>laser_link</frameName>
</plugin>
</sensor>
</gazebo>
</xacro:macro>
</robot>
2.调用lidar_gazebo.xacro文件生成总模型shcRobot2_xacro_lida_gazebo.xacro
<?xml version="1.0"?>
<robot name="arm" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="$(find shcrobot_description)/urdf/xacro/shcRobot2_base_lida_gazebo.xacro"/>
<xacro:include filename="$(find shcrobot_description)/urdf/xacro/lidar_gazebo.xacro"/>
<xacro:property name="lidar_offset_x" value="0" />
<xacro:property name="lidar_offset_y" value="0" />
<xacro:property name="lidar_offset_z" value="0.4" />
<robot_base/>
<!-- lidar -->
<joint name="lidar_joint" type="fixed">
<origin xyz="${lidar_offset_x} ${lidar_offset_y} ${lidar_offset_z}" rpy="0 0 0" />
<parent link="base_link"/>
<child link="laser_link"/>
</joint>
<xacro:rplidar prefix="laser"/>
</robot>
大家注意一下,上面的文件中,使用的是shcRobot2_base_lida_gazebo.xacro作为小车的基础模型,和之前的shcRobot2_base_gazebo.xacro不太一样,其实就是添加了支撑雷达的杆,为了方便起见,还是把代码粘在下面
<?xml version="1.0"?>
<robot name="robot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:property name="M_PI" value="3.14159"/>
<xacro:property name="base_length" value="1.3"/>
<xacro:property name="base_width" value="0.8"/>
<xacro:property name="base_height" value="0.2"/>
<xacro:property name="base_mass" value="10"/>
<xacro:property name="head_mass" value="0.2"/>
<xacro:property name="wheel_length" value="0.08"/>
<xacro:property name="wheel_radius" value="0.15"/>
<xacro:property name="wheel_mass" value="1"/>
<xacro:property name="wheel_x_offset" value="0.4"/>
<xacro:property name="wheel_y_offset" value="0.375"/>
<xacro:property name="wheel_z_offset" value="-0.055"/>
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
<material name="black">
<color rgba="0 0 0 0.9"/>
</material>
<material name="gray">
<color rgba="0.75 0.75 0.75 1"/>
</material>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
<material name="blue">
<color rgba="0 0 .8 1"/>
</material>
<xacro:macro name="cylinder_inertial_matrix" params="m r h">
<inertial>
<mass value="${m}"/>
<inertia ixx="${m*(3*r*r+h*h)/12}" ixy="0" ixz="0" iyy="${m*(3*r*r+h*h)/12}" iyz="0" izz="${m*r*r/2}"/>
</inertial>
</xacro:macro>
<xacro:macro name="retangle_inertial_matrix" params="m d w h">
<inertial>
<mass value="${m}"/>
<inertia ixx="${m*(d*d+h*h)/12}" ixy="0" ixz="0" iyy="${m*(d*d+w*w)/12}" iyz="0" izz="${m*(h*h+w*w)/12}"/>
</inertial>
</xacro:macro>
<xacro:macro name="steer_wheel" params="prefix reflect">
<link name="${prefix}_front_wheel">
<visual>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0"/>
<geometry>
<cylinder length="${wheel_length}" radius="${wheel_radius}"/>
</geometry>
<material name="black"/>
</visual>
<collision>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0"/>
<geometry>
<cylinder length="${wheel_length}" radius="${wheel_radius}"/>
</geometry>
</collision>
<cylinder_inertial_matrix m="${wheel_mass}" r="${wheel_radius}" h="${wheel_length}"/>
</link>
<joint name="${prefix}_front_steer_joint" type="continuous">
<origin xyz="${wheel_x_offset} ${reflect*wheel_y_offset} ${wheel_z_offset}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_front_wheel"/>
<axis xyz="0 1 0"/>
</joint>
<gazebo reference="${prefix}_front_wheel">
<material>Gazebo/Black</material>
</gazebo>
<transmission name="${prefix}_wheel_joint_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="${prefix}_front_steer_joint" >
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
</joint>
<actuator name="${prefix}_wheel_joint_motor">
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
</xacro:macro>
<xacro:macro name="drive_wheel" params="prefix reflect">
<link name="${prefix}_rear_wheel">
<visual>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0"/>
<geometry>
<cylinder length="${wheel_length}" radius="${wheel_radius}"/>
</geometry>
<material name="black"/>
</visual>
<collision>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0"/>
<geometry>
<cylinder length="${wheel_length}" radius="${wheel_radius}"/>
</geometry>
</collision>
<cylinder_inertial_matrix m="${wheel_mass}" r="${wheel_radius}" h="${wheel_length}"/>
</link>
<joint name="${prefix}_rear_drive_joint" type="continuous">
<origin xyz="${-1*wheel_x_offset} ${reflect*wheel_y_offset} ${wheel_z_offset}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_rear_wheel"/>
<axis xyz="0 1 0"/>
</joint>
<gazebo reference="${prefix}_rear_wheel">
<material>Gazebo/Black</material>
</gazebo>
<transmission name="${prefix}_wheel_joint_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="${prefix}_rear_drive_joint" >
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
</joint>
<actuator name="${prefix}_wheel_joint_motor">
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
</xacro:macro>
<xacro:macro name="robot_base">
<link name="head">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size=".12 .13 .04"/>
</geometry>
<material name="white"/>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size=".12 .13 .04"/>
</geometry>
</collision>
<retangle_inertial_matrix m="${head_mass}" d=".12" w=".13" h=".04"/>
</link>
<gazebo reference="head">
<material>Gazebo/White</material>
</gazebo>
<joint name="tobox" type="fixed">
<origin xyz="0.3 0 0.1" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="head"/>
</joint>
<link name="lida_rod">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length=".4" radius=".02"/>
</geometry>
<material name="white"/>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length=".4" radius=".02"/>
</geometry>
</collision>
<cylinder_inertial_matrix m=".3" r=".02" h=".4"/>
</link>
<gazebo reference="lida_road">
<material>Gazebo/Gray</material>
</gazebo>
<joint name="tobox2" type="fixed">
<origin xyz="0 0 0.2" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="lida_rod"/>
</joint>
<link name="base_link">
<visual>
<geometry>
<box size="${base_length} ${base_width} ${base_height}"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
<material name="blue"/>
</visual>
<collision>
<geometry>
<box size="${base_length} ${base_width} ${base_height}"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
</collision>
<retangle_inertial_matrix m="${base_mass}" d="${base_length}" w="${base_width}" h="${base_height}"/>
</link>
<gazebo reference="base_link">
<material>Gazebo/Blue</material>
</gazebo>
<steer_wheel prefix="left" reflect="1"/>
<steer_wheel prefix="right" reflect="-1"/>
<drive_wheel prefix="left" reflect="1"/>
<drive_wheel prefix="right" reflect="-1"/>
<gazebo>
<plugin name="differential_drive_controller"
filename="libgazebo_ros_diff_drive.so">
<rosDebugLevel>Debug</rosDebugLevel>
<publishWheelTF>true</publishWheelTF>
<robotNamespace>/</robotNamespace>
<publishTf>1</publishTf>
<publishWheelJointState>true</publishWheelJointState>
<alwaysOn>true</alwaysOn>
<updateRate>100.0</updateRate>
<legacyMode>true</legacyMode>
<leftJoint>left_rear_drive_joint</leftJoint>
<rightJoint>right_rear_drive_joint</rightJoint>
<wheelSeparation>0.8</wheelSeparation>
<wheelDiameter>${2*wheel_radius}</wheelDiameter>
<broadcastTF>1</broadcastTF>
<wheelTorque>80</wheelTorque>
<wheelAcceleration>3</wheelAcceleration>
<commandTopic>cmd_vel</commandTopic>
<odometryFrame>odom</odometryFrame>
<odometryTopic>odom</odometryTopic>
<robotBaseFrame>base_link</robotBaseFrame>
</plugin>
</gazebo>
<gazebo>
<plugin name="differential_drive_controller"
filename="libgazebo_ros_diff_drive.so">
<rosDebugLevel>Debug</rosDebugLevel>
<publishWheelTF>true</publishWheelTF>
<robotNamespace>/</robotNamespace>
<publishTf>1</publishTf>
<publishWheelJointState>true</publishWheelJointState>
<alwaysOn>true</alwaysOn>
<updateRate>100.0</updateRate>
<legacyMode>true</legacyMode>
<leftJoint>left_front_steer_joint</leftJoint>
<rightJoint>right_front_steer_joint</rightJoint>
<wheelSeparation>0.8</wheelSeparation>
<wheelDiameter>${2*wheel_radius}</wheelDiameter>
<broadcastTF>1</broadcastTF>
<wheelTorque>80</wheelTorque>
<wheelAcceleration>3</wheelAcceleration>
<commandTopic>cmd_vel</commandTopic>
<odometryFrame>odom</odometryFrame>
<odometryTopic>odom</odometryTopic>
<robotBaseFrame>base_link</robotBaseFrame>
</plugin>
</gazebo>
</xacro:macro>
</robot>
3.修改相应launch文件,启动仿真
<launch>
<!-- 设置launch文件的参数 -->
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!--运行gazebo仿真环境-->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="/home/yk1995/building_editor_models/world1/world2"/>
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- 加载机器人模型描述参数 -->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find shcrobot_description)/urdf/xacro/shcRobot2_xacro_lida_gazebo.xacro'"/>
<!--运行joint_state_publisher节点,发布机器人关节状态-->
<node name = "robot_state_publisher" pkg = "robot_state_publisher" type = "state_publisher">
<param name="publish_frequency" type="double" value="20.0" />
</node>
<!-- 在gazebo中加载机器人模型-->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model shcrobot -param robot_description"/>
<node pkg="tf" type="static_transform_publisher" name="link1_broadcaster" args="0.20 0 0 0 0 0 base_link laser 50" />
</launch>
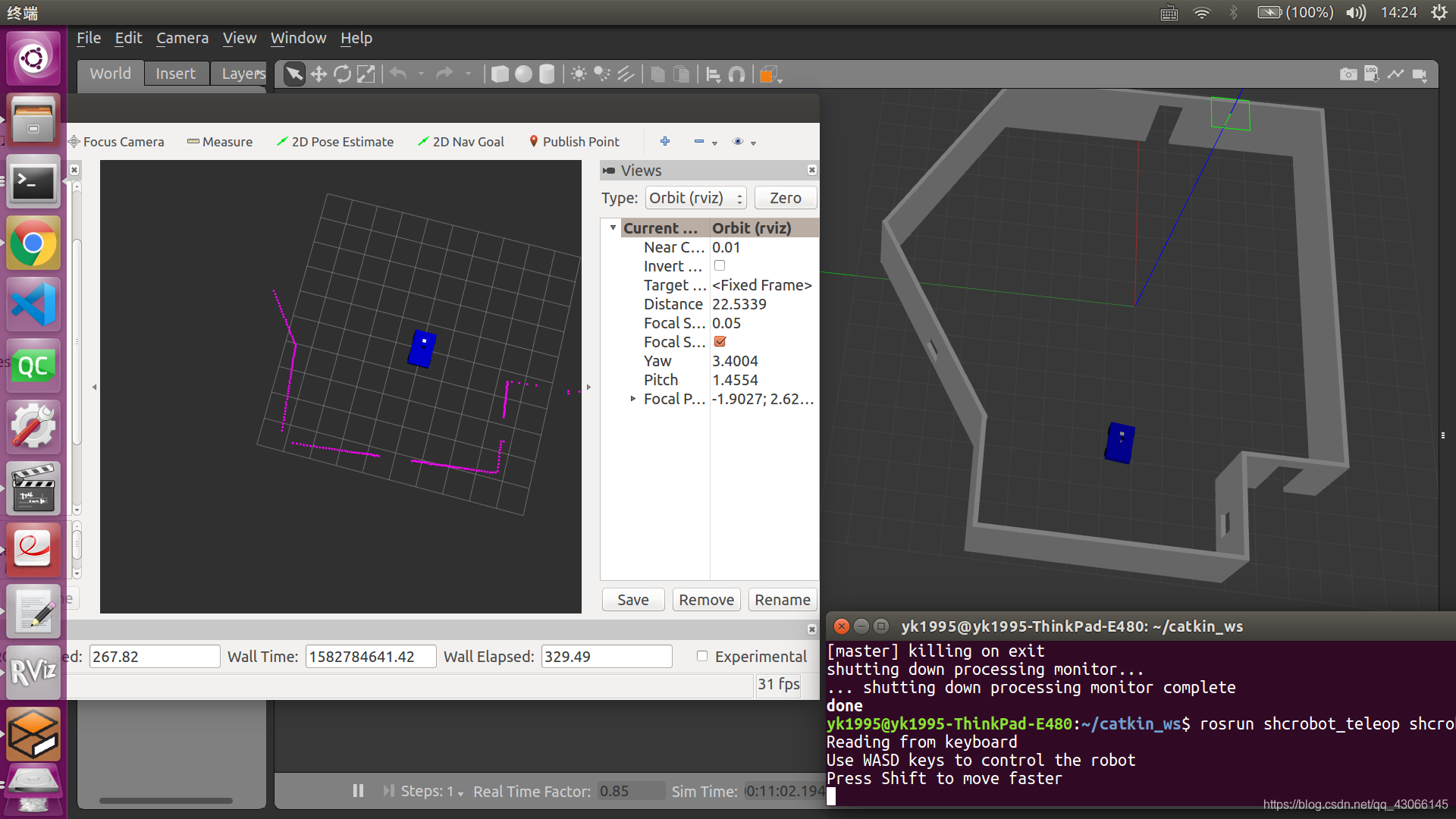
启动键盘控制节点和rviz节点,可以输出激光雷达的点云图像
附键盘控制节点的cpp文件[2]
#include <termios.h>
#include <signal.h>
#include <math.h>
#include <stdio.h>
#include <stdlib.h>
#include <sys/poll.h>
#include <boost/thread/thread.hpp>
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
#define KEYCODE_W 0x77
#define KEYCODE_A 0x61
#define KEYCODE_S 0x73
#define KEYCODE_D 0x64
#define KEYCODE_A_CAP 0x41
#define KEYCODE_D_CAP 0x44
#define KEYCODE_S_CAP 0x53
#define KEYCODE_W_CAP 0x57
class SmartCarKeyboardTeleopNode
{
private:
double walk_vel_;
double run_vel_;
double yaw_rate_;
double yaw_rate_run_;
geometry_msgs::Twist cmdvel_;
ros::NodeHandle n_;
ros::Publisher pub_;
public:
SmartCarKeyboardTeleopNode()
{
pub_ = n_.advertise<geometry_msgs::Twist>("cmd_vel", 2);
ros::NodeHandle n_private("~");
n_private.param("walk_vel", walk_vel_, 2.5);
n_private.param("run_vel", run_vel_, 2.0);
n_private.param("yaw_rate", yaw_rate_, 3.0);
n_private.param("yaw_rate_run", yaw_rate_run_, 3.5);
}
~SmartCarKeyboardTeleopNode() { }
void keyboardLoop();
void stopRobot()
{
cmdvel_.linear.x = 0.0;
cmdvel_.angular.z = 0.0;
pub_.publish(cmdvel_);
}
};
SmartCarKeyboardTeleopNode* tbk;
int kfd = 0;
struct termios cooked, raw;
bool done;
int main(int argc, char** argv)
{
ros::init(argc,argv,"tbk", ros::init_options::AnonymousName | ros::init_options::NoSigintHandler);
SmartCarKeyboardTeleopNode tbk;
boost::thread t = boost::thread(boost::bind(&SmartCarKeyboardTeleopNode::keyboardLoop, &tbk));
ros::spin();
t.interrupt();
t.join();
tbk.stopRobot();
tcsetattr(kfd, TCSANOW, &cooked);
return(0);
}
void SmartCarKeyboardTeleopNode::keyboardLoop()
{
char c;
double max_tv = walk_vel_;
double max_rv = yaw_rate_;
bool dirty = false;
int speed = 0;
int turn = 0;
// get the console in raw mode
tcgetattr(kfd, &cooked);
memcpy(&raw, &cooked, sizeof(struct termios));
raw.c_lflag &=~ (ICANON | ECHO);
raw.c_cc[VEOL] = 1;
raw.c_cc[VEOF] = 2;
tcsetattr(kfd, TCSANOW, &raw);
puts("Reading from keyboard");
puts("Use WASD keys to control the robot");
puts("Press Shift to move faster");
struct pollfd ufd;
ufd.fd = kfd;
ufd.events = POLLIN;
for(;;)
{
boost::this_thread::interruption_point();
// get the next event from the keyboard
int num;
if ((num = poll(&ufd, 1, 250)) < 0)
{
perror("poll():");
return;
}
else if(num > 0)
{
if(read(kfd, &c, 1) < 0)
{
perror("read():");
return;
}
}
else
{
if (dirty == true)
{
stopRobot();
dirty = false;
}
continue;
}
switch(c)
{
case KEYCODE_W:
max_tv = walk_vel_;
speed = 1;
turn = 0;
dirty = true;
break;
case KEYCODE_S:
max_tv = walk_vel_;
speed = -1;
turn = 0;
dirty = true;
break;
case KEYCODE_A:
max_rv = yaw_rate_;
speed = 0;
turn = 1;
dirty = true;
break;
case KEYCODE_D:
max_rv = yaw_rate_;
speed = 0;
turn = -1;
dirty = true;
break;
case KEYCODE_W_CAP:
max_tv = run_vel_;
speed = 1;
turn = 0;
dirty = true;
break;
case KEYCODE_S_CAP:
max_tv = run_vel_;
speed = -1;
turn = 0;
dirty = true;
break;
case KEYCODE_A_CAP:
max_rv = yaw_rate_run_;
speed = 0;
turn = 1;
dirty = true;
break;
case KEYCODE_D_CAP:
max_rv = yaw_rate_run_;
speed = 0;
turn = -1;
dirty = true;
break;
default:
max_tv = walk_vel_;
max_rv = yaw_rate_;
speed = 0;
turn = 0;
dirty = false;
}
cmdvel_.linear.x = speed * max_tv;
cmdvel_.angular.z = turn * max_rv;
pub_.publish(cmdvel_);
}
}
参考文献:
1.深蓝学院-ROS理论与实践
2.https://www.guyuehome.com/253
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)