rviz中的仿真只是视觉上的仿真,不能称得上物理仿真,gazebo是真正意义上的三维物理仿真平台,可以在里面创建环境等相关信息,方便以后的建模和导航。
1.向xacro模型文件中添加惯性矩阵和碰撞属性
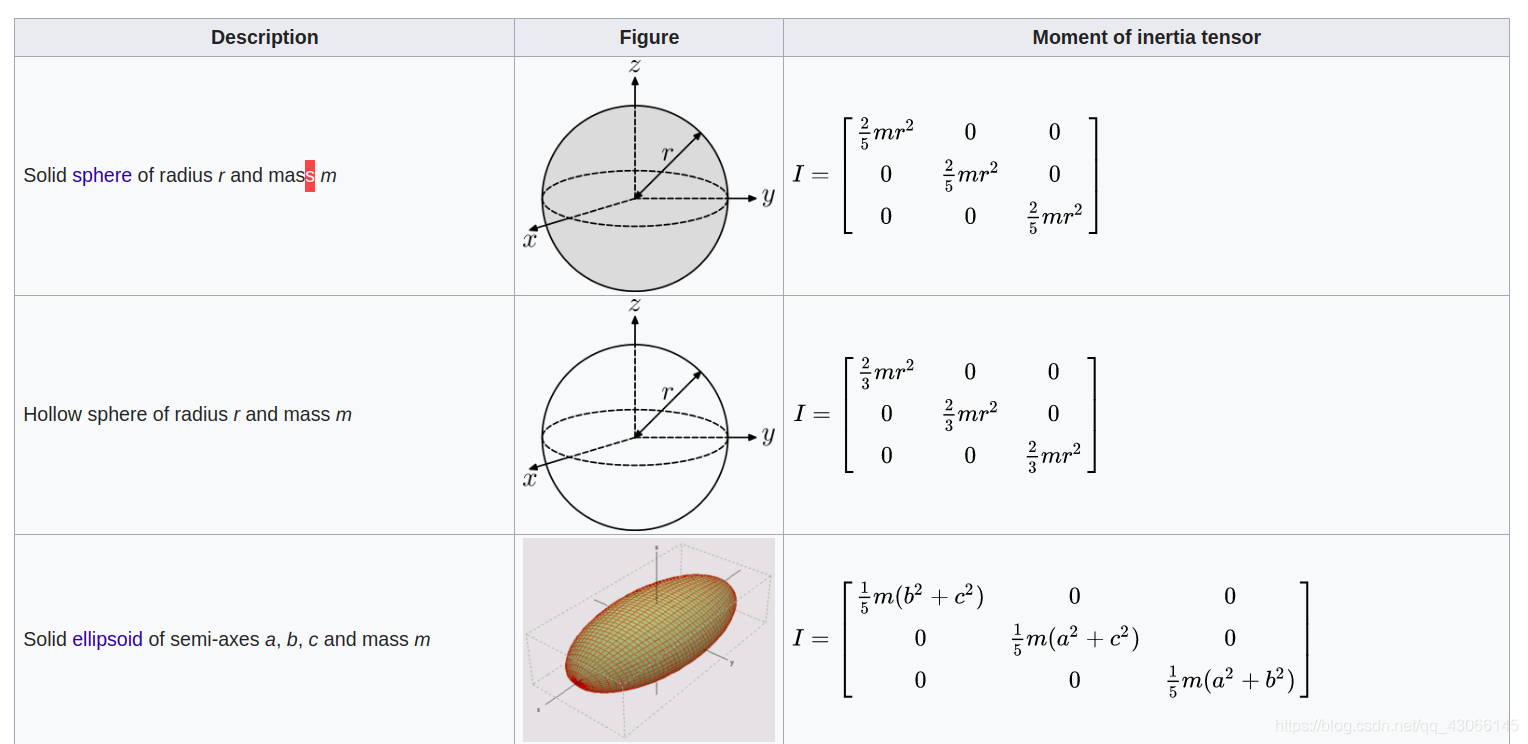
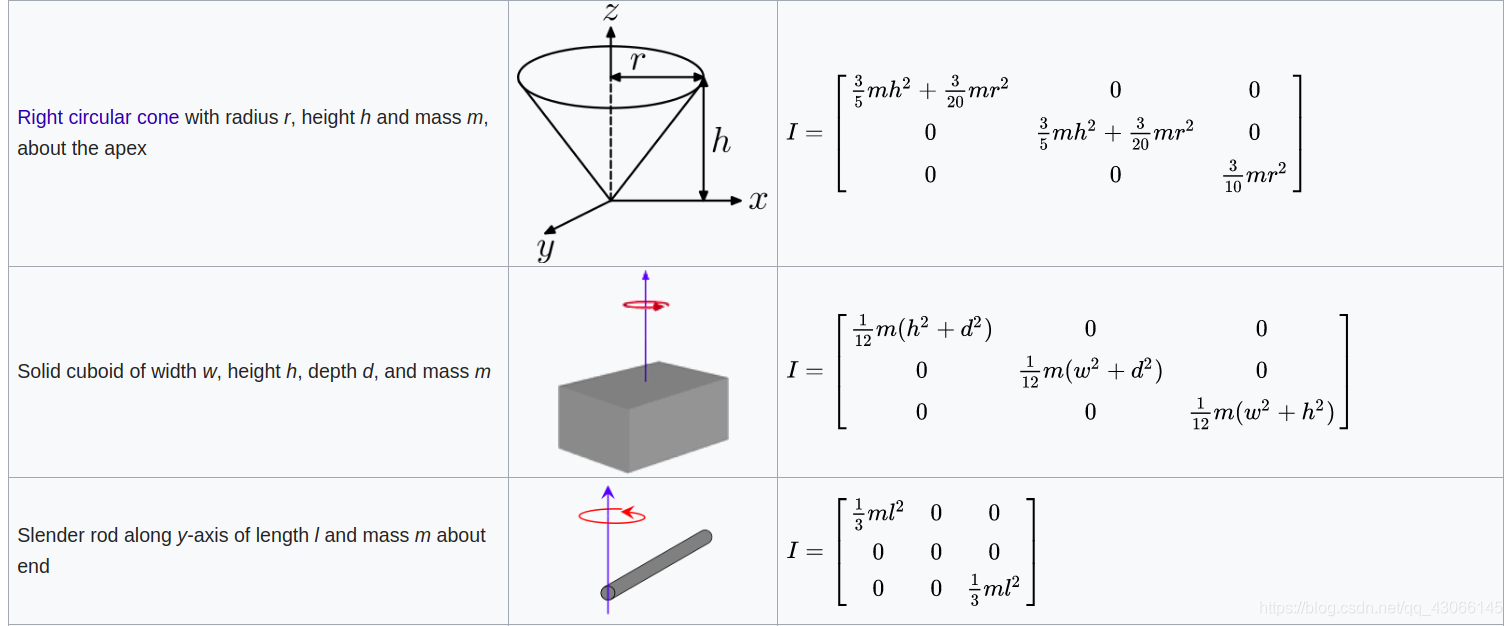
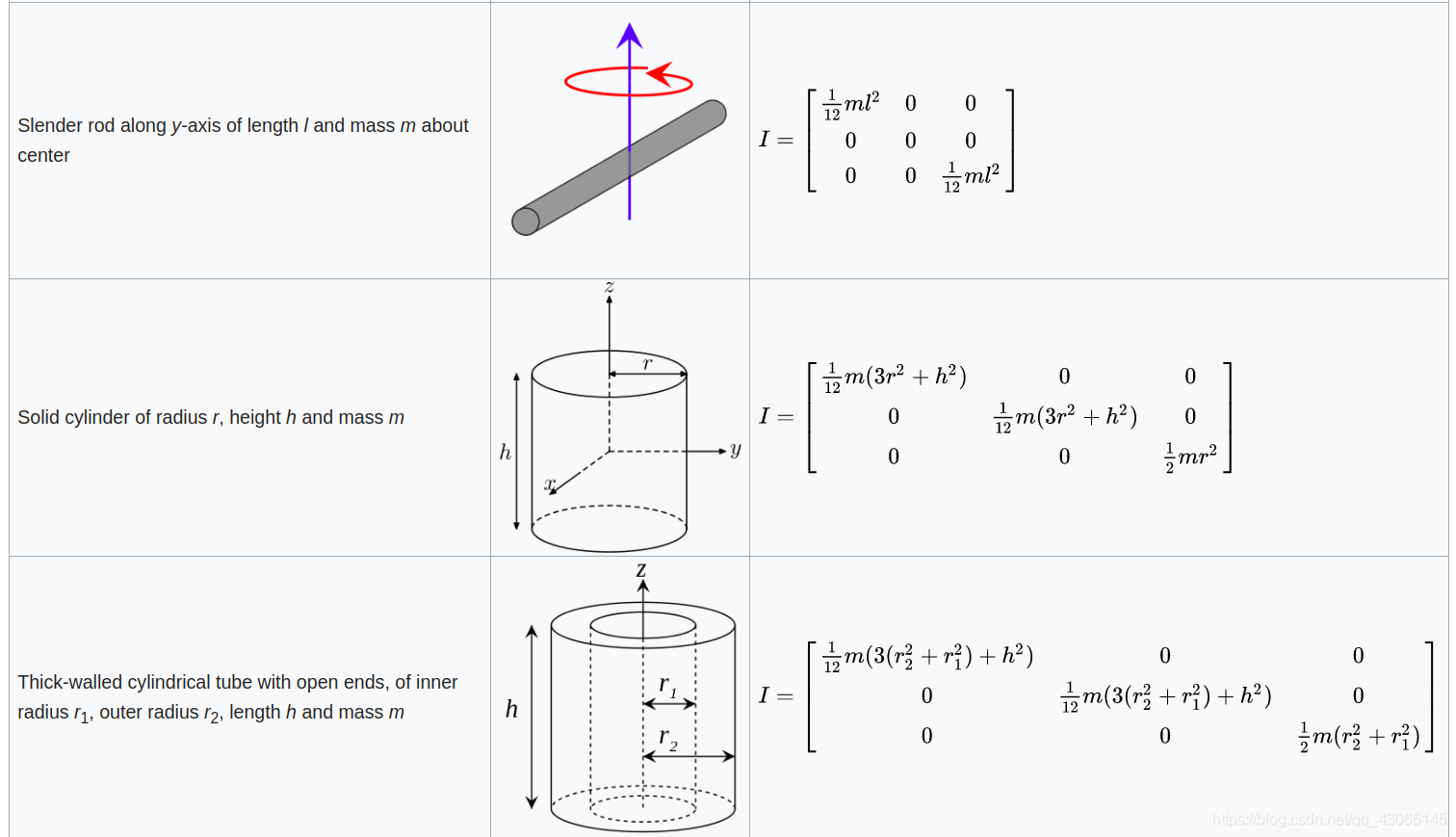
(1)惯性矩阵的计算是理论力学中的内容,可以从维基百科可以查到相应的公式进行计算,下面是部分截图。
<xacro:macro name="cylinder_inertial_matrix" params="m r h">
<inertial>
<mass value="${m}"/>
<inertia ixx="${m*(3*r*r+h*h)/12}" ixy="0" ixz="0" iyy="${m*(3*r*r+h*h)/12}" iyz="0" izz="${m*r*r/2}"/>
</inertial>
</xacro:macro>
<xacro:macro name="retangle_inertial_matrix" params="m d w h">
<inertial>
<mass value="${m}"/>
<inertia ixx="${m*(d*d+h*h)/12}" ixy="0" ixz="0" iyy="${m*(d*d+w*w)/12}" iyz="0" izz="${m*(h*h+w*w)/12}"/>
</inertial>
</xacro:macro>
(2)碰撞属性应该和机器人的外形有关,因此和visual标签类似
添加轮子碰撞属性
<collision>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0"/>
<geometry>
<cylinder length="${wheel_length}" radius="${wheel_radius}"/>
</geometry>
</collision>
添加车身的碰撞属性
<collision>
<geometry>
<box size="${base_length} ${base_width} ${base_height}"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
</collision>
添加车头标识块的碰撞属性
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size=".12 .13 .04"/>
</geometry>
</collision>
(3)添加gazebo标签,比如颜色定义,gazebo颜色与rviz颜色不兼容,需重新定义。
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
<material name="black">
<color rgba="0 0 0 0.9"/>
</material>
<material name="gray">
<color rgba="0.75 0.75 0.75 1"/>
</material>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
<material name="blue">
<color rgba="0 0 .8 1"/>
</material>
(4)向joint添加传动装置
<transmission name="${prefix}_wheel_joint_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="${prefix}_rear_drive_joint" > <hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
</joint>
<actuator name="${prefix}_wheel_joint_motor">
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
(5)添加gazebo控制器插件
<gazebo>
<plugin name="differential_drive_controller"
filename="libgazebo_ros_diff_drive.so">
<rosDebugLevel>Debug</rosDebugLevel>
<publishWheelTF>true</publishWheelTF>
<robotNamespace>/</robotNamespace>
<publishTf>1</publishTf>
<publishWheelJointState>true</publishWheelJointState>
<alwaysOn>true</alwaysOn>
<updateRate>100.0</updateRate>
<legacyMode>true</legacyMode>
<leftJoint>left_rear_drive_joint</leftJoint>
<rightJoint>right_rear_drive_joint</rightJoint>
<wheelSeparation>0.8</wheelSeparation>
<wheelDiameter>${2*wheel_radius}</wheelDiameter>
<broadcastTF>1</broadcastTF>
<wheelTorque>30</wheelTorque>
<wheelAcceleration>1.8</wheelAcceleration>
<commandTopic>cmd_vel</commandTopic>
<odometryFrame>odom</odometryFrame>
<odometryTopic>odom</odometryTopic>
<robotBaseFrame>base_link</robotBaseFrame>
</plugin>
</gazebo>
全部的xacro文件如下:
shcRobot2_base_gazebo.xacro,四个轮子都添加transmission模块,前后两个轮子都进行差速完成转向。
<?xml version="1.0"?>
<robot name="robot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:property name="M_PI" value="3.14159"/>
<xacro:property name="base_length" value="1.3"/>
<xacro:property name="base_width" value="0.8"/>
<xacro:property name="base_height" value="0.2"/>
<xacro:property name="base_mass" value="10"/>
<xacro:property name="head_mass" value="0.2"/>
<xacro:property name="wheel_length" value="0.08"/>
<xacro:property name="wheel_radius" value="0.15"/>
<xacro:property name="wheel_mass" value="1"/>
<xacro:property name="wheel_x_offset" value="0.4"/>
<xacro:property name="wheel_y_offset" value="0.375"/>
<xacro:property name="wheel_z_offset" value="-0.055"/>
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
<material name="black">
<color rgba="0 0 0 0.9"/>
</material>
<material name="gray">
<color rgba="0.75 0.75 0.75 1"/>
</material>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
<material name="blue">
<color rgba="0 0 .8 1"/>
</material>
<xacro:macro name="cylinder_inertial_matrix" params="m r h">
<inertial>
<mass value="${m}"/>
<inertia ixx="${m*(3*r*r+h*h)/12}" ixy="0" ixz="0" iyy="${m*(3*r*r+h*h)/12}" iyz="0" izz="${m*r*r/2}"/>
</inertial>
</xacro:macro>
<xacro:macro name="retangle_inertial_matrix" params="m d w h">
<inertial>
<mass value="${m}"/>
<inertia ixx="${m*(d*d+h*h)/12}" ixy="0" ixz="0" iyy="${m*(d*d+w*w)/12}" iyz="0" izz="${m*(h*h+w*w)/12}"/>
</inertial>
</xacro:macro>
<xacro:macro name="steer_wheel" params="prefix reflect">
<link name="${prefix}_front_wheel">
<visual>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0"/>
<geometry>
<cylinder length="${wheel_length}" radius="${wheel_radius}"/>
</geometry>
<material name="black"/>
</visual>
<collision>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0"/>
<geometry>
<cylinder length="${wheel_length}" radius="${wheel_radius}"/>
</geometry>
</collision>
<cylinder_inertial_matrix m="${wheel_mass}" r="${wheel_radius}" h="${wheel_length}"/>
</link>
<joint name="${prefix}_front_steer_joint" type="revolute">
<origin xyz="${wheel_x_offset} ${reflect*wheel_y_offset} ${wheel_z_offset}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_front_wheel"/>
<axis xyz="0 1 0"/>
</joint>
<gazebo reference="${prefix}_front_wheel">
<material>Gazebo/Black</material>
</gazebo>
<transmission name="${prefix}_wheel_joint_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="${prefix}_front_steer_joint" >
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
</joint>
<actuator name="${prefix}_wheel_joint_motor">
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
</xacro:macro>
<xacro:macro name="drive_wheel" params="prefix reflect">
<link name="${prefix}_rear_wheel">
<visual>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0"/>
<geometry>
<cylinder length="${wheel_length}" radius="${wheel_radius}"/>
</geometry>
<material name="black"/>
</visual>
<collision>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0"/>
<geometry>
<cylinder length="${wheel_length}" radius="${wheel_radius}"/>
</geometry>
</collision>
<cylinder_inertial_matrix m="${wheel_mass}" r="${wheel_radius}" h="${wheel_length}"/>
</link>
<joint name="${prefix}_rear_drive_joint" type="continuous">
<origin xyz="${-1*wheel_x_offset} ${reflect*wheel_y_offset} ${wheel_z_offset}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_rear_wheel"/>
<axis xyz="0 1 0"/>
</joint>
<gazebo reference="${prefix}_rear_wheel">
<material>Gazebo/Black</material>
</gazebo>
<transmission name="${prefix}_wheel_joint_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="${prefix}_rear_drive_joint" >
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
</joint>
<actuator name="${prefix}_wheel_joint_motor">
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
</xacro:macro>
<xacro:macro name="robot_base">
<link name="head">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size=".12 .13 .04"/>
</geometry>
<material name="white"/>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size=".12 .13 .04"/>
</geometry>
</collision>
<retangle_inertial_matrix m="${head_mass}" d=".12" w=".13" h=".04"/>
</link>
<gazebo reference="head">
<material>Gazebo/White</material>
</gazebo>
<joint name="tobox" type="fixed">
<origin xyz="0.3 0 0.1" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="head"/>
</joint>
<link name="base_link">
<visual>
<geometry>
<box size="${base_length} ${base_width} ${base_height}"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
<material name="blue"/>
</visual>
<collision>
<geometry>
<box size="${base_length} ${base_width} ${base_height}"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
</collision>
<retangle_inertial_matrix m="${base_mass}" d="${base_length}" w="${base_width}" h="${base_height}"/>
</link>
<gazebo reference="base_link">
<material>Gazebo/Blue</material>
</gazebo>
<steer_wheel prefix="left" reflect="1"/>
<steer_wheel prefix="right" reflect="-1"/>
<drive_wheel prefix="left" reflect="1"/>
<drive_wheel prefix="right" reflect="-1"/>
<gazebo>
<plugin name="differential_drive_controller"
filename="libgazebo_ros_diff_drive.so">
<rosDebugLevel>Debug</rosDebugLevel>
<publishWheelTF>true</publishWheelTF>
<robotNamespace>/</robotNamespace>
<publishTf>1</publishTf>
<publishWheelJointState>true</publishWheelJointState>
<alwaysOn>true</alwaysOn>
<updateRate>100.0</updateRate>
<legacyMode>true</legacyMode>
<leftJoint>left_rear_drive_joint</leftJoint>
<rightJoint>right_rear_drive_joint</rightJoint>
<wheelSeparation>0.8</wheelSeparation>
<wheelDiameter>${2*wheel_radius}</wheelDiameter>
<broadcastTF>1</broadcastTF>
<wheelTorque>80</wheelTorque>
<wheelAcceleration>3</wheelAcceleration>
<commandTopic>cmd_vel</commandTopic>
<odometryFrame>odom</odometryFrame>
<odometryTopic>odom</odometryTopic>
<robotBaseFrame>base_link</robotBaseFrame>
</plugin>
</gazebo>
<gazebo>
<plugin name="differential_drive_controller"
filename="libgazebo_ros_diff_drive.so">
<rosDebugLevel>Debug</rosDebugLevel>
<publishWheelTF>true</publishWheelTF>
<robotNamespace>/</robotNamespace>
<publishTf>1</publishTf>
<publishWheelJointState>true</publishWheelJointState>
<alwaysOn>true</alwaysOn>
<updateRate>100.0</updateRate>
<legacyMode>true</legacyMode>
<leftJoint>left_front_steer_joint</leftJoint>
<rightJoint>right_front_steer_joint</rightJoint>
<wheelSeparation>0.8</wheelSeparation>
<wheelDiameter>${2*wheel_radius}</wheelDiameter>
<broadcastTF>1</broadcastTF>
<wheelTorque>80</wheelTorque>
<wheelAcceleration>3</wheelAcceleration>
<commandTopic>cmd_vel</commandTopic>
<odometryFrame>odom</odometryFrame>
<odometryTopic>odom</odometryTopic>
<robotBaseFrame>base_link</robotBaseFrame>
</plugin>
</gazebo>
</xacro:macro>
</robot>
shcRobot_xacro_gazebo.xacro
<?xml version="1.0"?>
<robot name="arm" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="$(find shcrobot_description)/urdf/xacro/shcRobot2_base_gazebo.xacro"/>
<robot_base/>
</robot>
2.创建gazebo仿真环境
在launch文件中添加gazebo环境的描述,下面是对整个launch文件的解析。
(1)添加启动gazebo仿真环境
<!-- 设置launch文件的参数 -->
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
(2)加载机器人模型描述参数
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find shcrobot_description)/urdf/xacro/shcRobot2_xacro_gazebo.xacro'"/>
(3)运行关节发布节点
<!--运行joint_state_publisher节点,发布机器人关节状态-->
<node name = "robot_state_publisher" pkg = "robot_state_publisher" type = "state_publisher">
<param name="publish_frequency" type="double" value="20.0" />
</node>
<!--运行robot_state_publisher节点,发布tf-->
(4)在gazebo中加载机器人模型
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model shcrobot -param robot_description"/>
3.运行launch文件
完整的launch文件
<launch>
<!-- 设置launch文件的参数 -->
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!--运行gazebo仿真环境-->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- 加载机器人模型描述参数 -->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find shcrobot_description)/urdf/xacro/shcRobot2_xacro_gazebo.xacro'"/>
<!--运行joint_state_publisher节点,发布机器人关节状态-->
<node name = "robot_state_publisher" pkg = "robot_state_publisher" type = "state_publisher">
<param name="publish_frequency" type="double" value="20.0" />
</node>
<!-- 在gazebo中加载机器人模型-->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model shcrobot -param robot_description"/>
</launch>
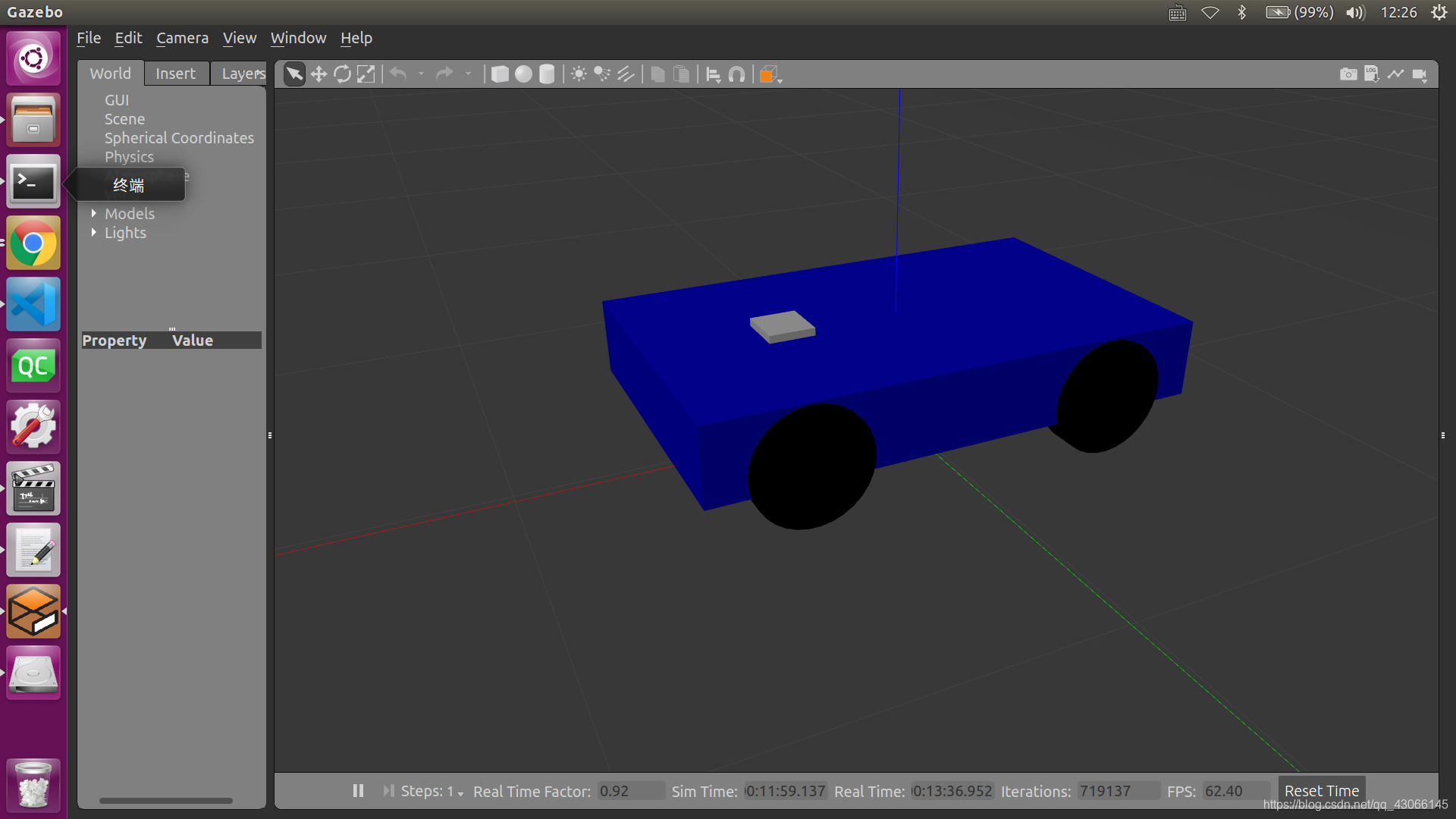
4.创建仿真环境
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)