CUBLI 简化 一维模型(有bug)
文章目录
-
- 前言
- 一、CUBLI是什么?
- 二、制作步骤
- 1.MPU6050&&编码器操作
- 2.什么是PID
- 3.我的控制策略
- 4.代码实现
- 三、存在的问题及可能的解决方法
- 问题一:电机方向
- 问题二:平衡时间短(2~5S)
- 解决方法:
- 总结
-
前言
简化CUBLI为一维,制作了一个平衡三角(暂且这么叫),淘宝有成品卖。本着学习的态度于寒假期间(21年一月至二月)制作。
现情况如下:
1.MPU6050 获取平衡三角姿态
2.直流电机 以及 光电编码器
3.控制器 STM32 F411RE NUCLEO板
4.PID控制器
5.HAL库 开发
6.3D打印 && SW制图
7.工程代码、文件以及3D模型已打包值BaiDu Pan(按需索取)链接: link 提取码:aw5i
8.存在一些问题于文中述
一、CUBLI是什么?
「Cubli」出身于瑞士苏黎世联邦理工学院动力系统和控制实验室的项目,直译就是「小方块」。它是个15 × 15 × 15 厘米的金属方块,能借助3个转轮来实现多种技巧。最令人印象深刻的是 Cubli 超乎寻常的平衡能力。(出自知乎链接: link.)
将其简化为一维模型,原理类似于平衡小车。
先上靓照(哈哈哈啊哈)

二、制作步骤
1.MPU6050&&编码器操作
Cube MX配置以及代码等已置于下面两篇文章中
HAL库 MPU6050的使用 链接: link
HAL库 AB相编码器链接: link
2.什么是PID
PID即:Proportional(比例)、Integral(积分)、Differential(微分)的缩写。顾名思义,PID控制算法是结合比例、积分和微分三种环节于一体的控制算法,它是连续系统中技术最为成熟、应用最为广泛的一种控制算法,该控制算法出现于20世纪30至40年代,适用于对被控对象模型了解不清楚的场合。实际运行的经验和理论的分析都表明,运用这种控制规律对许多工业过程进行控制时,都能得到比较满意的效果。PID控制的实质就是根据输入的偏差值,按照比例、积分、微分的函数关系进行运算,运算结果用以控制输出。

在工业过程中,连续控制系统的理想PID控制规律为:

式中,Kp——比例增益,Kp与比例度成倒数关系; [2]
Tt——积分时间常数; [2]
TD——微分时间常数; [2]
u(t)——PID控制器的输出信号; [2]
e(t)——给定值r(t)与测量值之差。 [2]
以上关于PID内容摘自百度百科
3.我的控制策略

(1)控制策略如上图,目标是实现平衡三角直立,其角度是固定值;角度控制的输出为速度控制的输入,速度控制的输出为加载至电机的PWM高电平值;系统可反馈实时角度、转速等数据实现反馈。
实际代码中涉及积分限幅、输出限幅。个人理解:积分过大不利于系统稳定;由于输出为PWM高电平值,周期具有固定性,因此输出PWM高电平值应具有是上下限。
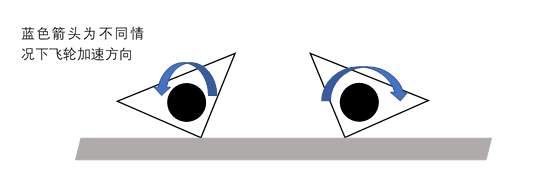
(2)系统具有方向性,因此应规定正方向。飞轮起到角动量平衡的作用,加速旋转方向如下图(减速相反)。
(3)保护措施。电机旋转速度快,飞轮具有一定的伤害性,当倾角偏离一定范围(直立目标挽救不回来)时控制电机停车。另外,3D模型设计将飞轮包裹于材料中,可实现一定的保护作用。
4.代码实现
此处仅展示PID控制策略
/**********************************
直立环PD控制器:Kp * Ek + Ki * Ek_S(积分) + Kd * Ek_D
入口:Med:机械中值(期望角度),Angle:真实角度
出口:直立环输出
**********************************/
int Vertical(float Med ,float Angle )
{
int PWM_OUT ;
Vertical_Err_Last = Vertical_Err ; //保存上次偏差
Vertical_Err = Angle - Med ; //计算偏差
Vertical_Integral = Vertical_Integral + Vertical_Err ; //积分
//积分限幅
if(Vertical_Integral > Vertical_Integral_Max) Vertical_Integral = Vertical_Integral_Max ;
if(Vertical_Integral <-Vertical_Integral_Max) Vertical_Integral =-Vertical_Integral_Max ;
//pid运算
PWM_OUT = Vertical_Kp * Vertical_Err + Vertical_Ki * Vertical_Integral + Vertical_Kd * ( Vertical_Err - Vertical_Err_Last ) ;
//PWM_OUT = Vertical_Kp * (Angle - Med ) + Vertical_Kd * (gyro - 0) ;
//输出限幅
if(PWM_OUT > Vertical_Out_Max ) PWM_OUT = Vertical_Out_Max ;
if(PWM_OUT <-Vertical_Out_Max ) PWM_OUT =-Vertical_Out_Max ;
return PWM_OUT ;
}
/**********************************
速度环PI控制器:Kp * Ek + Ki * Ek_S(积分) + Kd * Ek_D
**********************************/
int Velocity(int Target,int encoder)
{
int PWM_OUT ;
Velocity_Err_Last = Velocity_Err ; //保存上次偏差
Velocity_Err = encoder - Target ; //计算偏差
Velocity_Integral = Velocity_Integral + Velocity_Err ; //积分
//积分限幅
if(Velocity_Integral > Velocity_Integral_Max) Velocity_Integral = Velocity_Integral_Max ;
if(Velocity_Integral <-Velocity_Integral_Max) Velocity_Integral =-Velocity_Integral_Max ;
//pid运算
PWM_OUT = Velocity_Kp * Velocity_Err + Velocity_Ki * Velocity_Integral + Velocity_Kd * ( Velocity_Err - Velocity_Err_Last ) ;
//PWM_OUT = Vertical_Kp * (Angle - Med ) + Vertical_Kd * (gyro - 0) ;
//输出限幅
if(PWM_OUT > Velocity_Out_Max ) PWM_OUT = Velocity_Out_Max ;
if(PWM_OUT <-Velocity_Out_Max ) PWM_OUT =-Velocity_Out_Max ;
return PWM_OUT ;
}
三、存在的问题及可能的解决方法
问题一:电机方向
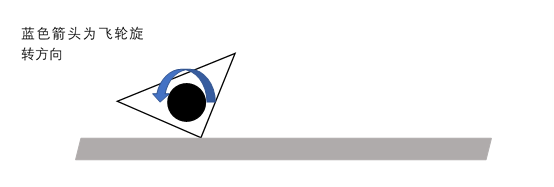
当平衡三角情况如上图所示时实现平衡可逆时针加速或顺时针减速。顺时针减速不可实现,仅可逆时针加速
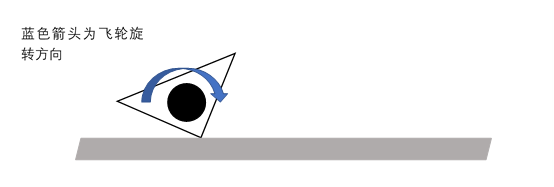
当平衡三角情况如上图所示时,实现平衡可逆时针加速或顺时针减速。若当前转速很高,逆时针加速会导致平衡三角瞬间失去平衡。此情况未考虑到。
问题二:平衡时间短(2~5S)
现阶段分析原因如下:
1.没有采用DMP库(小垃圾现在还搞不懂)角度计算方法为加速度简单的积分,系统启动时角度为0,而平衡三角启动时需手扶启动,存在机械中值(即Angle_Target)不准确问题。
2.如问题一中所述,电机方向控制好似存在不合理处,可能在第二种情况时瞬间反向,系统瞬间失衡。
3.调参问题,调参方法不正确,或者参数未找到合适值(可能性较小)。
解决方法:
- 完善电机方向控制函数
- 不采用角度控制,反而直接利用角速度控制。原因:平衡三角平衡时角速度变化范围小,应在0附近摆动。
- 采用MPU9250,可以直接获取角度,避开DMP库(价格昂贵)
总结
平衡效果
B站链接: link.
个人总结
此篇文章记述了作者(单片机业余爱好者)2021新年期间的劳动(哈哈),不完善处较多,时间原因暂且搁置。考研结束后没有进行复习,初试成绩将出,复试势在必行,明天就要进行复习了,祝自己好运,冲冲冲!!!
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)