报错描述及解决
ubuntu版本:20.04,ROS版本:noetic
~$ roslaunch turtle_tf turtle_tf_demo.launch
报错信息
[turtle1_tf_broadcaster-4] process has died
完整信息
... logging to /home/zbw/.ros/log/501597ba-e4b7-11eb-b452-b90036f82ed0/roslaunch-zbw-ubuntu-11587.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://zbw-ubuntu:36561/
SUMMARY
========
PARAMETERS
* /rosdistro: noetic
* /rosversion: 1.15.11
* /scale_angular: 2.0
* /scale_linear: 2.0
* /turtle1_tf_broadcaster/turtle: turtle1
* /turtle2_tf_broadcaster/turtle: turtle2
NODES
/
sim (turtlesim/turtlesim_node)
teleop (turtlesim/turtle_teleop_key)
turtle1_tf_broadcaster (turtle_tf/turtle_tf_broadcaster.py)
turtle2_tf_broadcaster (turtle_tf/turtle_tf_broadcaster.py)
turtle_pointer (turtle_tf/turtle_tf_listener.py)
auto-starting new master
process[master]: started with pid [11595]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to 501597ba-e4b7-11eb-b452-b90036f82ed0
process[rosout-1]: started with pid [11605]
started core service [/rosout]
process[sim-2]: started with pid [11612]
process[teleop-3]: started with pid [11613]
process[turtle1_tf_broadcaster-4]: started with pid [11614]
Reading from keyboard
---------------------------
Use arrow keys to move the turtle. 'q' to quit.
process[turtle2_tf_broadcaster-5]: started with pid [11619]
process[turtle_pointer-6]: started with pid [11622]
Traceback (most recent call last):
File "/opt/ros/noetic/lib/turtle_tf/turtle_tf_broadcaster.py", line 35, in <module>
import rospy
File "/opt/ros/noetic/lib/python3/dist-packages/rospy/__init__.py", line 49, in <module>
from .client import spin, myargv, init_node, \
File "/opt/ros/noetic/lib/python3/dist-packages/rospy/client.py", line 52, in <module>
import roslib
File "/opt/ros/noetic/lib/python3/dist-packages/roslib/__init__.py", line 50, in <module>
from roslib.launcher import load_manifest # noqa: F401
File "/opt/ros/noetic/lib/python3/dist-packages/roslib/launcher.py", line 42, in <module>
import rospkg
ImportError: No module named rospkg
Traceback (most recent call last):
File "/opt/ros/noetic/lib/turtle_tf/turtle_tf_listener.py", line 34, in <module>
import rospy
File "/opt/ros/noetic/lib/python3/dist-packages/rospy/__init__.py", line 49, in <module>
from .client import spin, myargv, init_node, \
File "/opt/ros/noetic/lib/python3/dist-packages/rospy/client.py", line 52, in <module>
import roslib
File "/opt/ros/noetic/lib/python3/dist-packages/roslib/__init__.py", line 50, in <module>
from roslib.launcher import load_manifest # noqa: F401
File "/opt/ros/noetic/lib/python3/dist-packages/roslib/launcher.py", line 42, in <module>
import rospkg
ImportError: No module named rospkg
Traceback (most recent call last):
File "/opt/ros/noetic/lib/turtle_tf/turtle_tf_broadcaster.py", line 35, in <module>
import rospy
File "/opt/ros/noetic/lib/python3/dist-packages/rospy/__init__.py", line 49, in <module>
from .client import spin, myargv, init_node, \
File "/opt/ros/noetic/lib/python3/dist-packages/rospy/client.py", line 52, in <module>
import roslib
File "/opt/ros/noetic/lib/python3/dist-packages/roslib/__init__.py", line 50, in <module>
from roslib.launcher import load_manifest # noqa: F401
File "/opt/ros/noetic/lib/python3/dist-packages/roslib/launcher.py", line 42, in <module>
import rospkg
ImportError: No module named rospkg
[turtle1_tf_broadcaster-4] process has died [pid 11614, exit code 1, cmd /opt/ros/noetic/lib/turtle_tf/turtle_tf_broadcaster.py __name:=turtle1_tf_broadcaster __log:=/home/zbw/.ros/log/501597ba-e4b7-11eb-b452-b90036f82ed0/turtle1_tf_broadcaster-4.log].
log file: /home/zbw/.ros/log/501597ba-e4b7-11eb-b452-b90036f82ed0/turtle1_tf_broadcaster-4*.log
[turtle2_tf_broadcaster-5] process has died [pid 11619, exit code 1, cmd /opt/ros/noetic/lib/turtle_tf/turtle_tf_broadcaster.py __name:=turtle2_tf_broadcaster __log:=/home/zbw/.ros/log/501597ba-e4b7-11eb-b452-b90036f82ed0/turtle2_tf_broadcaster-5.log].
log file: /home/zbw/.ros/log/501597ba-e4b7-11eb-b452-b90036f82ed0/turtle2_tf_broadcaster-5*.log
[turtle_pointer-6] process has died [pid 11622, exit code 1, cmd /opt/ros/noetic/lib/turtle_tf/turtle_tf_listener.py __name:=turtle_pointer __log:=/home/zbw/.ros/log/501597ba-e4b7-11eb-b452-b90036f82ed0/turtle_pointer-6.log].
log file: /home/zbw/.ros/log/501597ba-e4b7-11eb-b452-b90036f82ed0/turtle_pointer-6*.log
如果demo运行正常,效果应该是屏幕上出现两只小乌龟,当使用键盘上的箭头按键控制小乌龟运动时,另一只小乌龟会跟随我们控制的乌龟移动。由于出现了上面的错误,屏幕上只出现一只小乌龟。demo中使用的是python3,而系统默认使用的是python2,更改默认python版本后运行正常。
ubuntu20.04下python版本切换
- 查看已安装的python版本
~$ ls /usr/bin/python*
可以看到当前系统中有两个python版本

- 查看系统中是否有python配置选项
~$ sudo update-alternatives --list python
没有添加过配置选项的话会显示update-alternatives错误

配置过的话会显示下图的内容

- 第1步中看到了系统有python2和python3两个版本,下面配置python选项
~$ sudo update-alternatives --install /usr/bin/python python /usr/bin/python2 1
~$ sudo update-alternatives --install /usr/bin/python python /usr/bin/python3 2

- python版本切换
先来查看下目前使用的python版本
~$ python --version
当前使用的是python2

下面来切换python版本
~$ sudo update-alternatives --config python
根据编号,输入2后回车,即切换到了python3
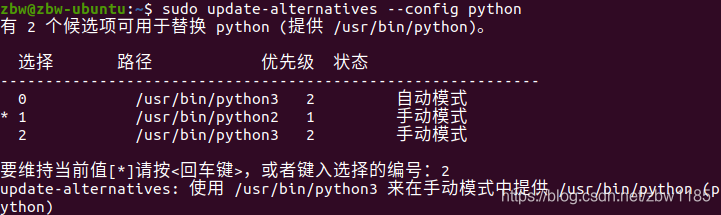
再来查看一下python版本,已经切换成功,如果想要切换回python2,重复上面的步骤,输入编号1即可

参考网址
☝ ★★★ — 返回 《ROS机器人开发笔记汇总》总目录 — ★★★ ☝