CAN(Controller Area Network)控制器局域网络,CAN网络在早期的整车应用中以BCM(车身控制器)为控制中心,主要是车身零部件(雨刮/大灯/车窗…),智能硬件较少,所以早期的正常CAN网络把所有其他的ECU全部放在Other ECU里边,如下图。
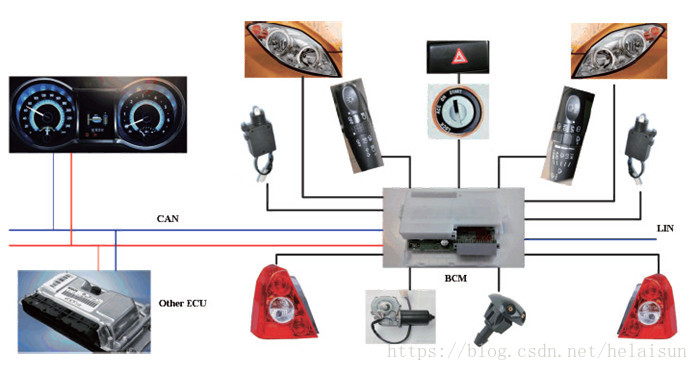
ECU(Electronic ControlUnit)电子控制单元,是汽车专用微机控制器,一个ECU一般负责1个或多个智能硬件设备。
CAN网络
每条CAN总线一般都是由2根线组成的双绞线构成,一根can_high,一根can_low,分别代表高电平和低电平,一般燃油车的CAN网络可以分成如下5条CAN总线:
-
PT CAN (PowerTrain CAN ) 动力总成CAN总线
PT CAN总线上一般有以下ECU:
ECM ( Engine Control Module ) 发动机控制模块
SRS ( SupplementalRestraintSystem) 电子安全气囊
BMS ( Battery Management System ) 电池管理系统
EPB Electronic Park Brake, 电子驻车系统
PT CAN负责车辆动力,是整车CAN网络信号优先级及信号传输速率最高的一条CAN总线。
-
CH CAN (Chassis CAN) 底盘控制CAN总线
CH CAN总线上一般有以下ECU:
ABS ( Antilock Brake System ) 防抱死制动系统
ESP(Electronic Stability Program)车身电子稳定系统
EPS(Electric Power Steering)电子转向助力
……
CH CAN负责汽车底盘及4个轮子的制动/稳定/转向,由于涉及整车制动/助力转向等, 所以其网络信号优先级也是较高的。
-
Body CAN车身控制总线
Body CAN总线上一般有以下ECU:
AC ( Air Condition ) 空调
AVM(Around View Monitor) 360环视
BCM(Body Control Module) 天窗, 车窗, 雾灯, 转向灯, 雨刮…
IMMO(Immobilizer) 发动机防盗系统
TPMS(Tire Pressure Monitoring System) 胎压监控系统
……
Body CAN负责车身上的一些提高舒适性/安全性的智能硬件的管理与控制,其网络信号优先级较低, 因为以上设备都是辅助设备。
-
Info CAN ( Infomercial CAN ) 娱乐系统总线
Info CAN 总线上一般有以下ECU:
VAES( Video Audio Entertainment System) 车载娱乐系统(中控)
IPK(Instrument Pack) 组合仪表, 当今的数字仪表, 基本有音乐, 地图, 通话等娱乐功能.
……..
Info CAN是辅助可选设备, 所以优先级也是较低的,主要负责车身上的一些提高娱乐性的智能硬件的管理与控制。
-
DiagCAN ( Diagnose CAN ) 诊断控制总线
DiagCAN总线主要提供远程诊断功能,只有一个ECU:
Tbox(Telematics BOX) 远程控制模块
电动汽车的CAN网络模型也类似,只是其控制单元主要以VCM(Vehicle Control Module)整车控制模块为控制中心。
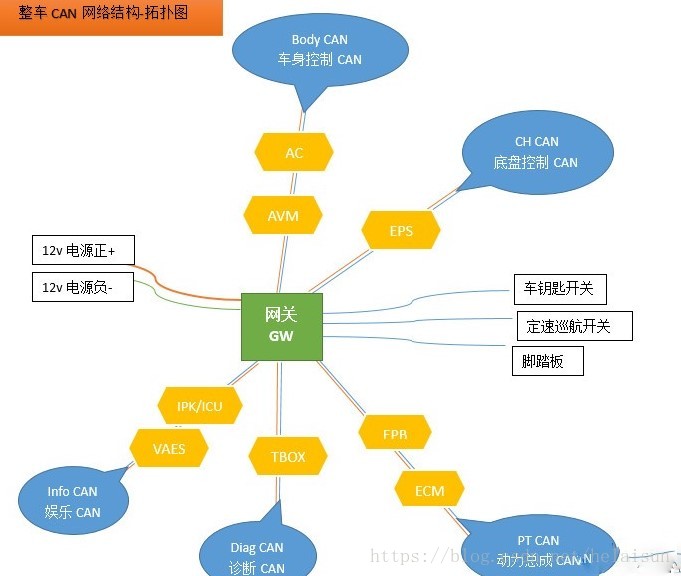
CAN网关
CAN网关或叫汽车网关,因为网关不仅处理CAN网络,还处理LIN网络.
实际can网关大概有六七十个接线pin脚,每个接线pin脚都有严格的定义, 要匹配规定好的can总线或者开关设备, 除了刚才涉及的10个can线接线口(5条双绞线),2个电源线接线口,还应包括定速巡航设备的8个接线口,电源管理方面的3个接线口,钥匙开关(或无钥匙启动系统)的5个接口,脚踏板的3个接线口,5个LIN接线pin脚,档位开关的4个接线pin脚等等。
某些汽车厂商可能有更多新的硬件开关设备,电压电阻开关设备等也都有对应的接线pin脚,
且可能预留一些PIN脚以备用.
CAN网关是整个CAN网络的核心, 控制着整车5条CAN总线的各类信号转发与处理,基本功能包括:
- 连接不同波特率(传输速度)的CAN总线/LIN总线,以实现CAN网络的网关中继功能。
- 诊断报文/非诊断报文转发。
- 诊断防火墙管理。
- 节点在线监控。
- 巡航控制器开关检测。
- 脚踏板位置检测。
- 网关休眠与唤醒管理。
- ECU升级/网关升级。
- 电压管理。
CAN网关可以接收任何CAN总线(还有LIN总线)传来的不同传输速率网络信号,把这些信号按一定的标准处理后,广播到整车网络去,如果有ECU订阅(接收)了这个信号, 则ECU将解析信号并做相应的处理。
整车所有ECU基本是以毫秒级或者微妙级的速度在源源不断的发送并接收信号,所以网关需要处理并转发广播的信号是非常多的且必须要很快处理完的。
车机娱乐系统
基本来说, 当今的智能车机基本有以下几个特点:
基于智能操作系统:Android,Linux等。
基本都是虚拟按键,较少用实体按键。
具备外网连接功能,即搭载了Tbox盒子。
有配套的车联网App,可以当手机钥匙及远程车控等功能。
具备控制:空调,数字液晶仪表,360度环视摄像头,其他车身设备(天窗, 车窗,大灯)的应用程序。
需要说明的是:
- 车机娱乐系统是Info CAN上的一个节点, 节点名称为VAES (Video Audio Entertainment System)
- 空调是Body CAN上的一个节点, 节点名称AC。
- 仪表是Info CAN上的节点,节点名称IPK,也叫ICU。
- 360智能环视摄像头是Body CAN上的节点,节点名称AVM。
- 其他车身设备(天窗, 车窗, 大灯)等设备是Body CAN上的BCM节点统一管理的。
车机节点是车机上的一块MCU,专门负责车机主机对整车CAN网络的CAN信号转换的,业界一般用IPCL协议进行CAN信号到字符串信号(程序员能识别的信号)的转换,以上字符串信号经过Carservice或App的解析后,转成文字或者图像的界面供用户选择和使用,这样就把原始CAN信号转成用户能够看得懂的文字或图像。
因此
- VAES(车机)节点订阅消息(接收): 车机就是一台显示器。
- VAES(车机)节点发送消息: 车机就是一台远程控制器。
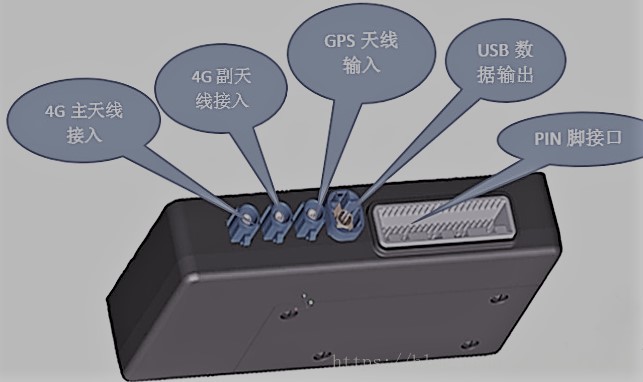
TBOX
Tbox是汽车上的一个盒子,其实是一个Android操作系统的带通讯功能的盒子,内含一张SIM卡,一般是中国联通SIM卡,与这个盒子配套硬件还有GPS天线,4G天线等。车机要联网必须有Tbox设备才能实现。
TBOX的功能如下:
-
Tbox可以给车机提供外网连接功能。
如何提供外网, 原理很简单, 可以简单的把它当做是USB上网卡。
-
Tbox可以提供GPS定位服务。
Tbox有GPS天线接入,车机通过USB数据输出接口实时获取GPS定位信息。
(Tbox的USB接口,除了提供外网数据, 提供GPS数据外,开发人员还可以通过这个USB线进行Tbox开发及adb debug等。)
-
Tbox是Diag CAN(诊断CAN)上的一个节点, 该节点可提供本地诊断和远程诊断等功能。
智能车机娱乐系统有配套的车联网手机App,通过App可远程查看车机状态,远程开启座椅加热,远程开启空调,远程获取车机状态信息等。
当然,车联网手机App状态查询/远程控制功能的实现,全部依托Tbox节点,Tbox节点可以接收远程4G信号,之后由Tbox在诊断CAN上发起CAN诊断及控制命令,Tbox还实时获取相关CAN信号并上传云平台,云平台返回数据到车联网手机App。最终达到远程诊断(远程获取车辆状态, 远程读取故障码等…) 和远程控制(控制车上某些智能硬件的作用, 比如空调, 座椅加热等…)。
Tbox上的SIM一般只给车主用户提供网络服务, 虽然这张电话可以打电话, 但是由于车机系统的功能接口限定(软件界面上的功能限定),限定了其只可以拨打道路救援电话,厂商客服电话,110等紧急电话,不可拨打普通手机号码或电话号码等。
整车电源的4种状态
车辆钥匙孔的4种状态,即LOCK, ACC, ON, START,分别对应4种电源模式,即OFF模式,ACC模式,RUN模式,CRANK模式。
- OFF模式,就是上图的LOCK,代表车辆电源未通电,此时整车can网络一般也处于休眠状态。
- ACC模式,是对应上图的ACC,是Accessory的简称,整车上电状态,整车通电了,can网络也会唤醒并开始传输信号,但是发动机未启动,整车基本通上了12V的电源电压,此时车窗可用,空调可以开启(但是由于发电机未开启, 空调制冷制热压缩机都无效果,只有鼓风机在吹风)。
- CRANK模式,对应上图START,发动机点火状态,即发动机已经启动,实际操作中,就是将钥匙拧到底,等发动机点火成功后,钥匙孔反弹到上图的ON,也就是下面说的RUN模式。
- RUN模式,对应上图的ON,发动机处于运行模式,此时发电机也运行,并给蓄电池充电,此时的空调制冷制热都可用。
本文是最近学习车辆CAN网络时的一些总结,主要参考如下:
CAN网关及CAN信号转发机制;
整车CAN网络基本结构;
Tbox在整车CAN网络的位置与作用;
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)