Gazebo和mavros
文章目录
- Gazebo和mavros
- 前言
- 一、什么是 MAVROS?
- 二、仿真工具Gazebo
- 1、创建工作空间并初始化
- 2、添加依赖,添加密钥
- 3、安装gazebo9.1
- 4、ros与gazebo插件
- 安装MAVROS
- 1、添加依赖、初始化工作空间
- 2、安装mavlink
- 3、安装mavros
- 4、创建部门
- 5、安装地理数据集
- 5、catkin build
- 6、添加环境变量
前言
上一节我们已经在地面端搭建好了地面站qgc,这一节在
一、什么是 MAVROS?
MAVROS是ROS的一个软件包,允许在运行ROS的计算机、支持MAVLink的飞控板以及支持MAVLink的地面站之间通讯。 MAVlink由17个字节组成,包括消息ID、目标ID和数据。其中消息ID显示是什么数据,可以在messageID命令集中看到消息ID。消息也可以通过无线信号进行传输
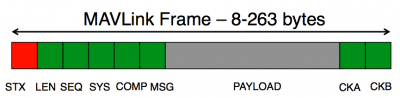

(官方的图)
二、仿真工具Gazebo
仿真首先分为软件在环仿真(SITL)和硬件在环仿真(HITL)。目前来看,软件在环仿真更简单实现及方便。软件在环仿真一共是有jMAVSim、Gazebo、AirSim这三种。
Gazebo是ROS系统自带的仿真平台,可以通过mavros通信协议,将飞控的操作数据反馈到仿真平台。进行无人机的仿真操作。PX4官方是这么说Gazebo仿真的:This simulator is highly recommended.
1、创建工作空间并初始化
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws
catkin_make
source devel/setup.bash

2、添加依赖,添加密钥
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
执行:
cat /etc/apt/sources.list.d/gazebo-stable.list
出现
deb http://packages.osrfoundation.org/gazebo/ubuntu-stable bionic main
设置密钥:
wget https://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
3、安装gazebo9.1
sudo apt-get update
sudo apt-get install gazebo9=9.1*
安装完成即可打开
gazebo
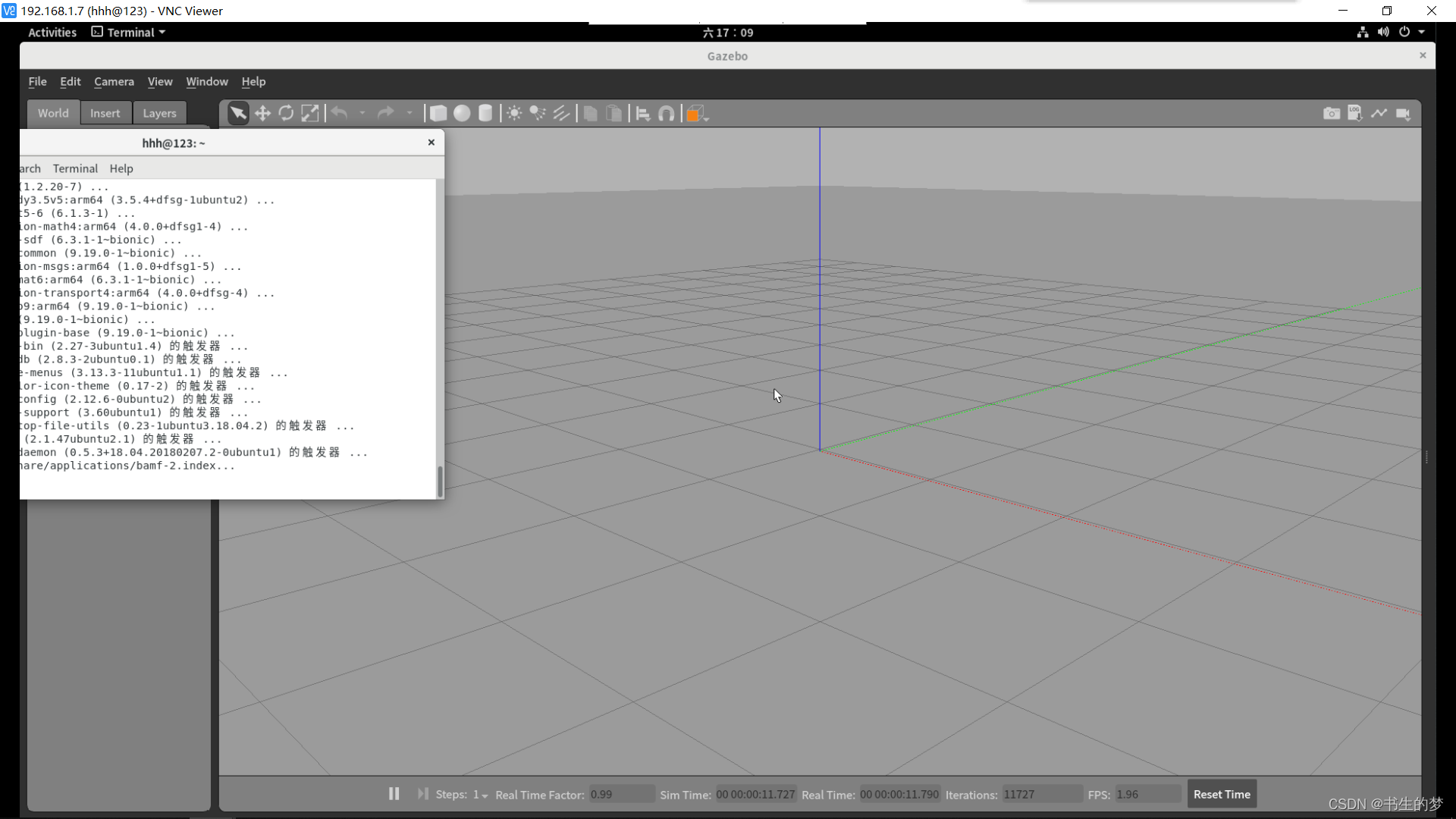 启动成功!
启动成功!
4、ros与gazebo插件
安装ros中的gazebo插件(这两步可能只有一步可以执行)
sudo apt install ros-melodic-gazebo9-*
sudo apt install ros-melodic-gazebo-*
分别再两个终端执行以下两句,如果上述步骤正确,即可打开ros-gazebo
roscore
rosrun gazebo_ros gazebo
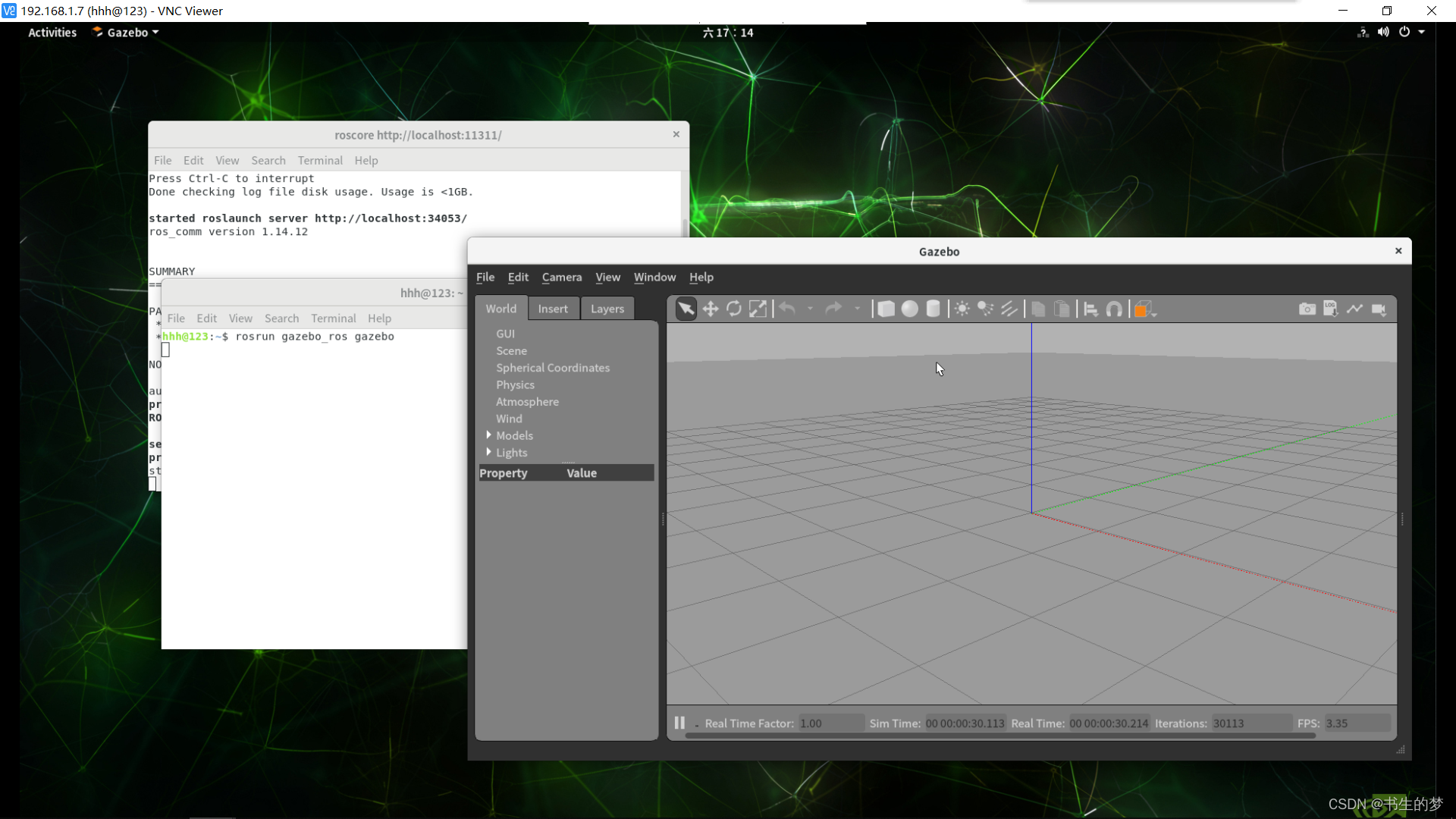
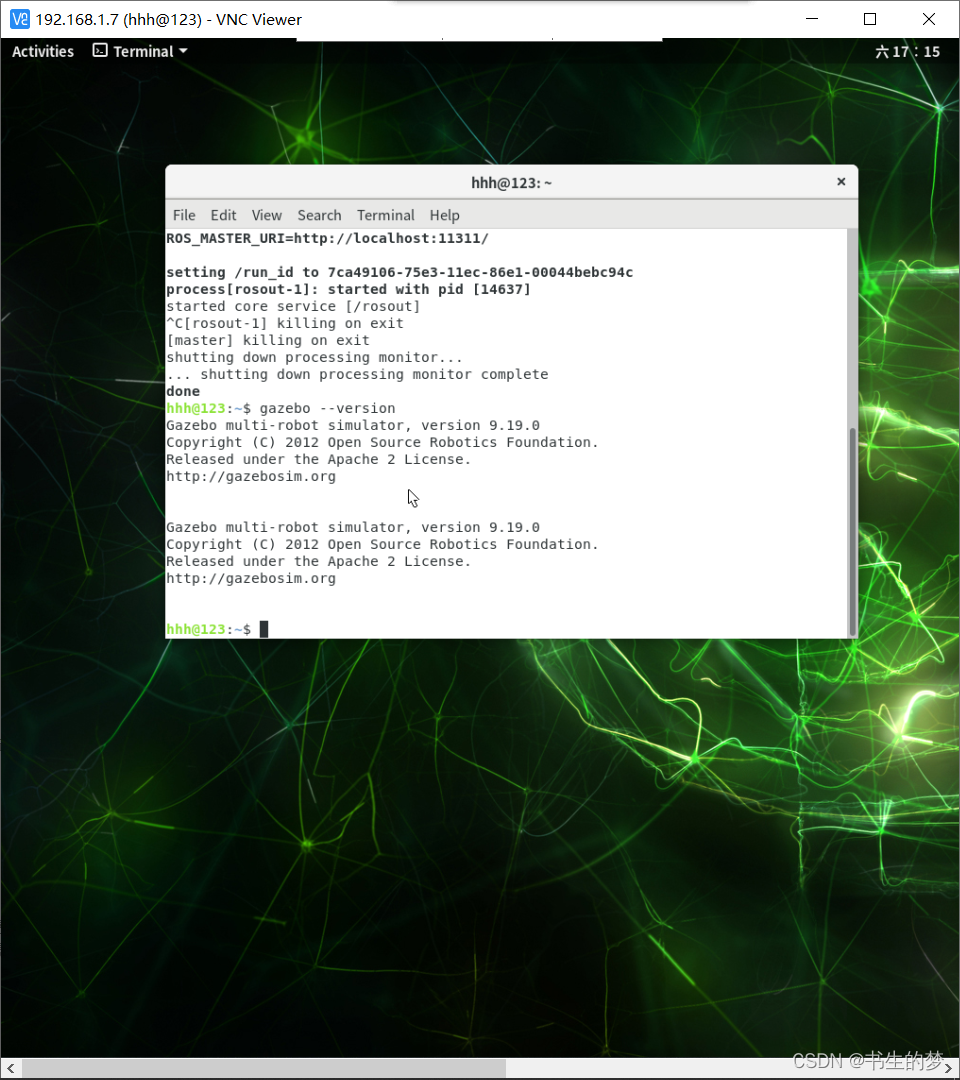
最后象征意义的查一下安装的版本(不同时间可能安装的版本不同)
gazebo --version
安装MAVROS
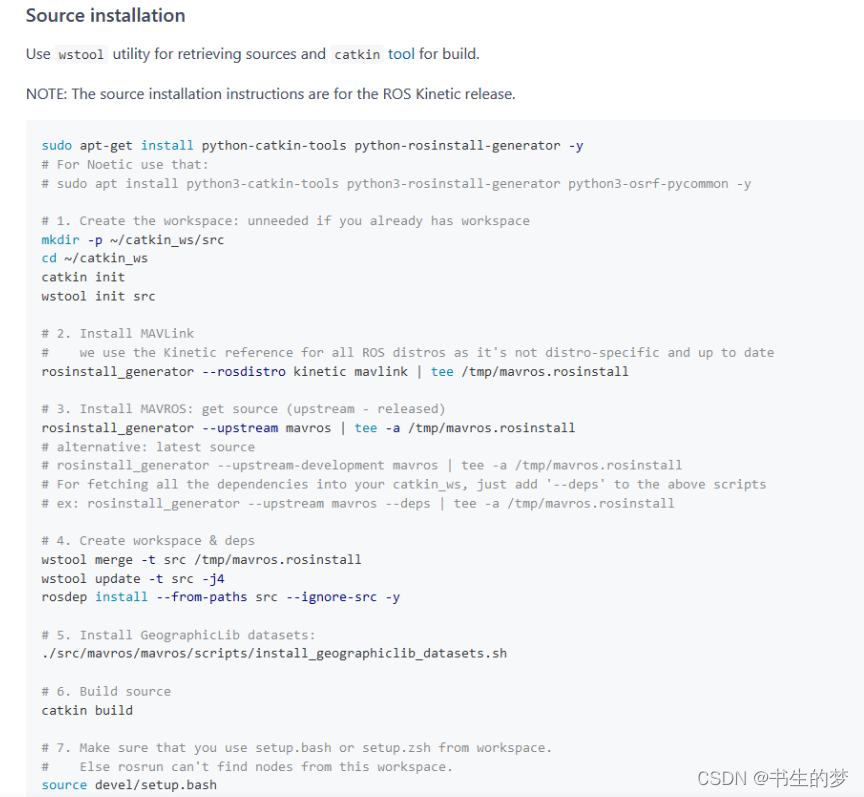
官方提供了两种安装方式,二进制安装和源码安装
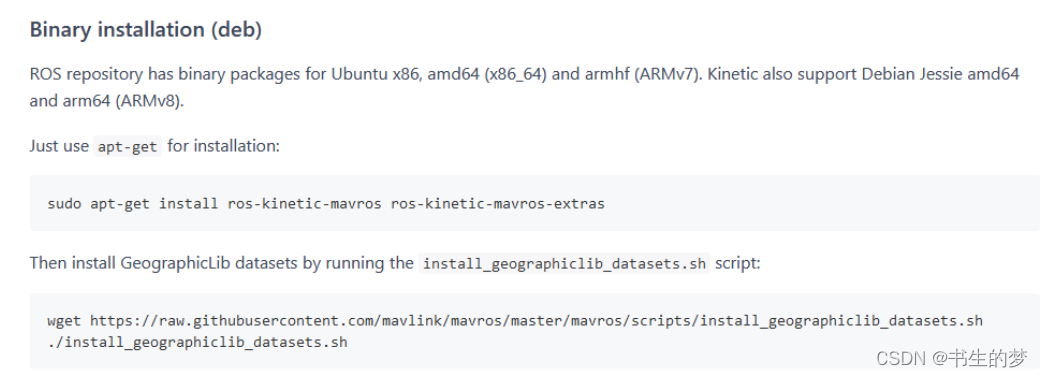
二进制的安装比较简单,但使用过程中不能对mavros进行修改,我直接选择下方的源码安装
友情提示:和你以前遇到的所有安装过程一样,我这里建议没办法科学上网的同学(就比如说我),或者使用移动宽带的话(也比如说我),使用手机热点进行下载,可以省去很多烦恼。
1、添加依赖、初始化工作空间
sudo apt-get install python-catkin-tools python-rosinstall-generator -y
mkdir -p ~/mavros_ws/src
cd ~/mavros_ws
catkin init
wstool init src
2、安装mavlink
rosinstall_generator --rosdistro melodic mavlink | tee /tmp/mavros.rosinstall
这一步需要在根目录下执行
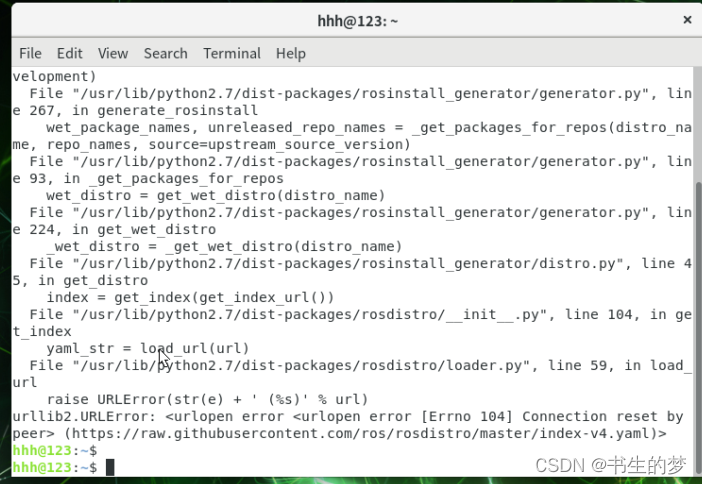
执行可能会出现这样的错误,如果是移动的宽带的话即使你修改host里的DNS也不通,所以不能科学上网就上热点
3、安装mavros
rosinstall_generator --upstream mavros | tee -a /tmp/mavros.rosinstall
或者直接使用下面的gitee来克隆
git clone https://gitee.com/zhuleilei33/mavros.git
这一句在你之前创建的文件里下载,最好在src文件里下载,
4、创建部门
wstool merge -t src /tmp/mavros.rosinstall
wstool update -t src -j4
rosdep install --from-paths src --ignore-src -y


5、安装地理数据集
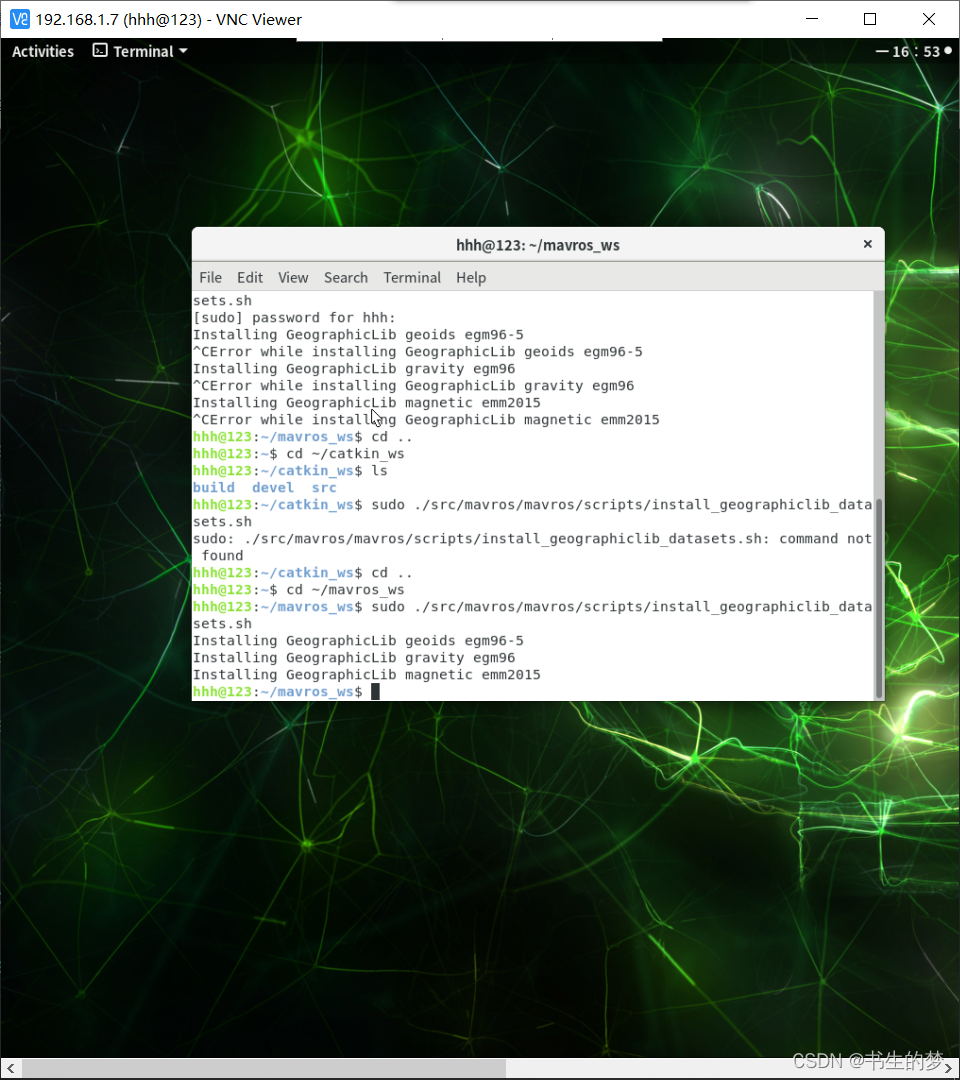
sudo ./src/mavros/mavros/scripts/install_geographiclib_datasets.sh
这里感触比较多啊,他这个不牵扯网络问题,就是慢的很,而且没有进度显示,我多次以为是卡了或者别的啥原因,前前后后弄了一两天,最后发现就是慢,建议执行命令后就去开一把,等回来就差不多了
5、catkin build
catkin build
这一步看性能,我没有全开Jeston的性能,时间就比较长,大家可以试试高性能模式下的构建速度
有一些warning,应该时一些依赖没有安装对位置,无伤大雅
6、添加环境变量
gedit ~/.bashrc
把下面这一句加到文档末尾
source ~/mavros_catkin_ws/devel/setup.bash
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)