参考:http://ardupilot.org/dev/docs/sitl-native-on-windows.html#sitl-native-on-windows
第一步:下载MAVProxy
第二步:下载Cygwin
在安装Cygwin时,要注意安装下图所有安装包

1. 打开然后关闭Cygwin
2. 找到C:\cygwin\home\user.bashrc中的.bashrc文件,用记事本格式打开,在最后面输入回车后加上export PATH=$PATH:$HOME/ardupilot/Tools/autotest
3. 打开Cygwin,输入命令
python -m ensurepip –user
python -m pip install –user future
python -m pip install –user lxml
完成所需python包的安装
第三步:下载FlightGear(注意:安装到默认目录,否则运行.bat时会找不到)
1. 运行~/ardupilot/Tools/autotest/fg_quad_view.bat
2. 在cygwin中输入
cd ~/ardupilot/ArduCopter
make sitl -j4(只需运行一次,出现问题的话可以使用命令make sitl -i)
sim_vehicle.py -j4 -L KSFO
不使用FlightGear实现3D可视化可直接输入命令
1.cd /cygdrive/f/GitHub/ardupilot/Arducopter(或者cd f:/GitHub/ardupilot/Arducopter)
或者直接把ardupilot复制到C:\cygwin\home\user\文件夹里然后cd ~/ardupilot/ArduCopter
来自 http://discuss.ardupilot.org/t/importerror-no-module-named-future/14243/15
2.make sitl -j4
3.export PATH=$PATH:$HOME/ardupilot/Tools/autotest(如果在.bashrc文件中添加过该命令且有效的话,则不用输入该命令)
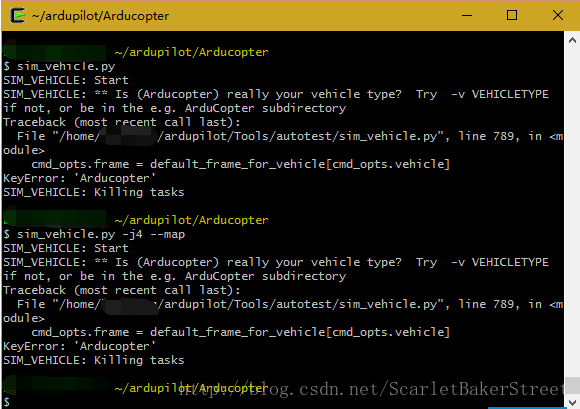
4.sim_vehicle.py -j4 –map(如果是3.3.3版本则使用sim_vehicle.sh -j4 –map)如果出现下图问题,使用命令sim_vehicle.py -v ArduCopter
Ps:如果要改变飞行器参数,可以在出现的MAVProxy.exe窗口里输入:param load ..\Tools\autotest\default_params\copter.parm(在cygwin里输入sim_vehicle.py -w可以将参数恢复成默认值)
如果要加入10m/s的南风,可以输入:
param set SIM_WIND_DIR 180
param set SIM_WIND_SPD 10
来自 http://ardupilot.org/dev/docs/using-sitl-for-ardupilot-testing.html
如果要改变油门,可以输入(1500为各输入的中间值):
rc 3 1600
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)