如上图所示,在实验过程中记录受试者走路时脚掌与跑步机界面的力与力矩
f
g
\boldsymbol{\mathrm{f}}_g
fg:
f
g
=
(
f
x
,
f
y
,
f
z
,
0
,
T
y
,
0
)
∈
R
6
,
\boldsymbol{\mathrm{f}}_g = (f_x,f_y,f_z,0,T_y,0) \in \mathbb{R}^6,
fg=(fx,fy,fz,0,Ty,0)∈R6, 其中
y
y
y为垂直于接触界面的方向,
T
y
T_y
Ty代表力矩。实验同时记录了接触时压力中心的位置:
c
p
=
(
c
x
,
c
y
,
c
z
)
∈
R
3
.
\boldsymbol{\mathrm{c}}_p = (c_x,c_y,c_z) \in \mathbb{R}^3.
cp=(cx,cy,cz)∈R3. 同时通过动捕系统获取Markers的位置信息
x
o
x_{o}
xo
x
o
=
(
p
x
,
p
y
.
p
z
)
∈
R
3
.
x_o = (p_x,p_y.p_z) \in \mathbb{R}^3.
xo=(px,py.pz)∈R3.
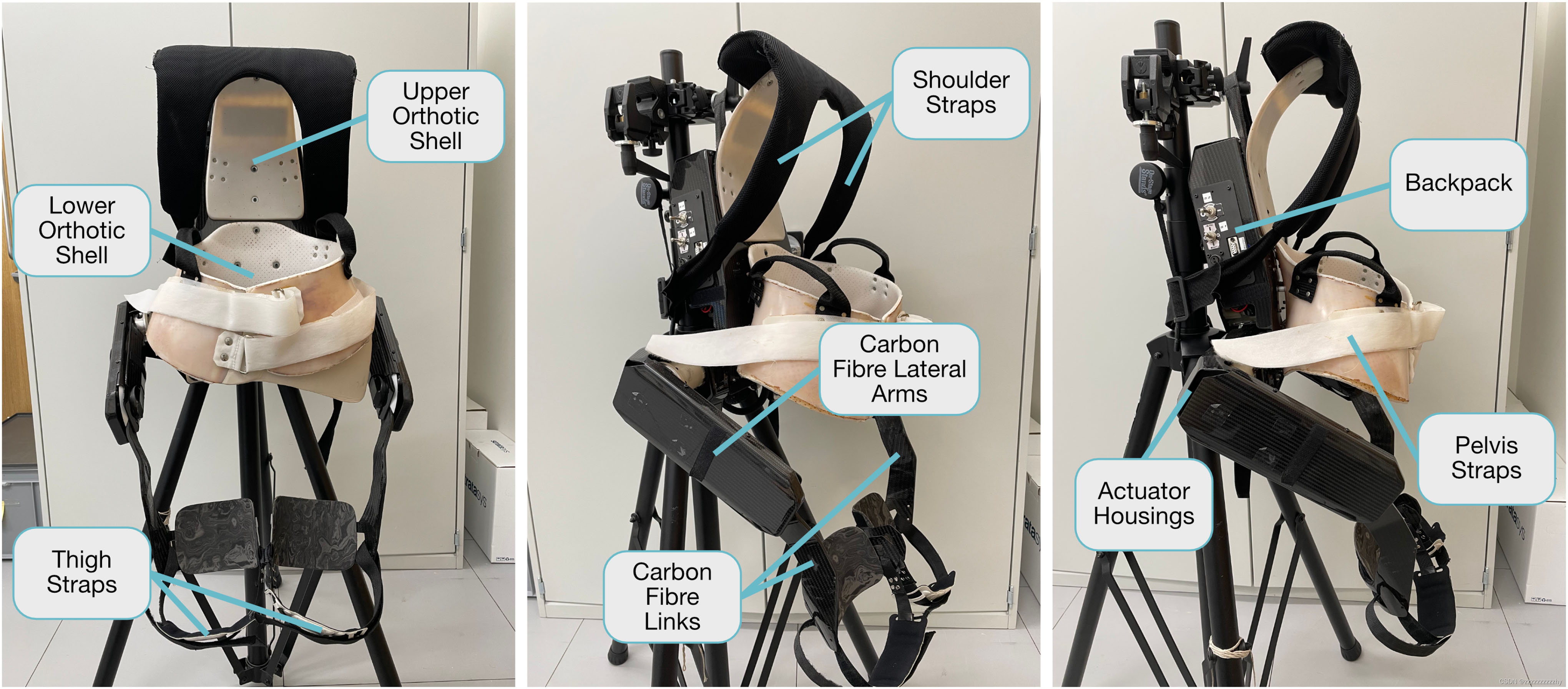
2. Active Pelvis Orthosis (APO)外骨骼
外骨骼的参数如下所示:
二. 外骨骼控制算法(四种模式)
1. Transparent Mode
通过底层的PD控制器,使得外骨骼的助力
τ
d
e
s
=
0
\tau_{des}=0
τdes=0,即模仿穿戴者没有穿戴外骨骼时的场景。
2. Adaptive Oscillator Mode
τ
d
e
s
=
K
v
(
θ
(
ϕ
−
δ
ϕ
)
−
θ
(
ϕ
)
)
,
\tau_{des} = K_\mathcal{v}(\theta(\phi - \delta\phi)-\theta(\phi)),
τdes=Kv(θ(ϕ−δϕ)−θ(ϕ)), 其中
K
v
,
δ
θ
K_\mathcal{v},\delta\theta
Kv,δθ为可调整参数,分别代表虚拟刚度矩阵(Virtual Stiffness)以及相位差(文章用相位
θ
∈
[
0
,
100
]
\theta \in [0,100]
θ∈[0,100]来表征当前行走处在的不同阶段,例如0代表左脚刚刚着地,右脚刚准备抬起;50代表右脚抬起到最高处)。
θ
(
⋅
)
\theta(\cdot)
θ(⋅)是将相位
θ
\theta
θ映射到关节角度的函数。
这种控制算法相当于估计下一时刻关节角度位置,然后给予合适大小的力矩帮助穿戴者到达该关节角度位置。
3. Generic Mode
τ
d
e
s
=
{
−
τ
e
,
0
≤
x
<
17
,
τ
f
,
40
≤
x
<
64
,
−
τ
e
,
92
≤
x
≤
100
,
0
,
else
.
\tau_{des} = \begin{cases} -\tau_e, & 0\le x<17,\\ \tau_f, & 40 \le x <64, \\ -\tau_e, & 92 \le x \le 100, \\ 0, & \text{else}. \end{cases}
τdes=⎩⎨⎧−τe,τf,−τe,0,0≤x<17,40≤x<64,92≤x≤100,else. 将人体行走分为固定的四个阶段,每个阶段给予固定的助力(缺乏个性化)。
4. Human-in-the-Loop Mode(文章的卖点所在)
与3.Generic Mode中相同,文章将人体行走分为了五个阶段,并根据事先设定好的函数形式提供助力。不同的是,这种模式下五个阶段的分界线
p
i
,
i
=
1
,
2
,
3
,
4
p_i, i=1,2,3,4
pi,i=1,2,3,4变为了可调节参数。(注意只有
p
i
p_i
pi是可调节参数,
τ
e
,
τ
f
\tau_e,\tau_f
τe,τf仍为固定大小的值)。
文章在接下来的部分讲解了如何利用OpenSim的肌肉骨骼模型来优化
p
i
p_i
pi,以达到最小化人体新陈代谢速率的效果。
由模型中的Markers点与实验中的Markers点位置一一对应,可以通过最小化以下函数求解当前各关节角度
q
q
q:
min
q
∑
i
=
1
m
ω
i
∣
∣
x
o
i
−
x
i
(
q
)
∣
∣
2
,
\min_{q}{\sum_{i=1}^m{\omega_i || x_{oi}-x_i(q)||^2}},
qmini=1∑mωi∣∣xoi−xi(q)∣∣2, 其中
m
m
m为marker点的数量,
x
o
i
x_{oi}
xoi为实验中通过动捕系统测得的第
i
i
i个Marker的三维坐标,
x
i
(
⋅
)
x_i(\cdot)
xi(⋅)为OpenSim的函数,其功能是计算前向运动学,即根据当前的关节角度
q
q
q计算当前Marker点的位置。通过最小化以上函数,就可以求得当前各关节角度
q
q
q。
在求得关节角度后,再根据逆动力学模型计算当前关节力矩
τ
\tau
τ:
τ
=
M
(
q
)
q
¨
+
C
(
q
,
q
˙
)
+
g
(
q
)
+
J
(
q
)
T
f
ext
,
\tau = M(q)\ddot{q}+C(q,\dot{q})+g(q) + J(q)^Tf_{\text{ext}},
τ=M(q)q¨+C(q,q˙)+g(q)+J(q)Tfext, 其中
M
,
J
M,J
M,J分别为模型的质量矩阵(mass matrix)以及Jacobian,
C
,
g
C,g
C,g为科里奥利力项和重力项,
f
ext
f_{\text{ext}}
fext为外界力。这些函数均为OpenSim内部函数。
2.通过关节力矩计算肌肉激活度
每一个关节力矩都由不同的肌肉-肌腱模块提供的力矩组成:
τ
j
=
∑
m
=
1
c
ϕ
m
T
C
m
,
\tau_j = \sum_{m=1} ^c{\phi_m^TC_m},
τj=m=1∑cϕmTCm, 其中
C
m
C_m
Cm为力臂,
ϕ
m
\phi_m
ϕm为肌肉力。而肌肉力通过以下的函数计算得到:
ϕ
m
=
H
(
α
m
,
λ
m
,
v
m
,
π
m
)
,
\phi_m = H(\alpha_m,\lambda_m, v_m,\pi_m),
ϕm=H(αm,λm,vm,πm), 其中
H
H
H为OpenSim内置黑箱函数,
α
m
\alpha_m
αm为肌肉激活度,
λ
m
,
v
m
\lambda_m, v_m
λm,vm为当前肌肉骨骼模型参数,
π
m
\pi_m
πm为肌肉的参数。
通过联立以上两式,可以得到肌肉激活度
α
m
\alpha_m
αm。注意到以上的问题一般都为超定方程,无法求得单一解,一般情况下都需要增加一目标函数以求得单一解。文章选择的目标为最小化肌肉激活度:
min
∑
m
=
1
n
(
α
m
)
2
.
\min \sum_{m=1}^n(\alpha_m)^2.
minm=1∑n(αm)2.
3.通过肌肉激活度计算肌肉能量(与新陈代谢速率相关)
通过黑箱模型,可以计算得到第m块肌肉运用的能量比例
ϵ
˙
m
\dot\epsilon_m
ϵ˙m:
ϵ
˙
m
=
U
(
α
m
,
λ
m
,
v
m
,
π
m
)
,
\dot\epsilon_m = U(\alpha_m,\lambda_m, v_m,\pi_m),
ϵ˙m=U(αm,λm,vm,πm), 肌肉总能量比例为
ϵ
˙
=
∑
m
=
1
n
ϵ
˙
m
\dot\epsilon = \sum_{m=1}^n\dot\epsilon_m
ϵ˙=m=1∑nϵ˙m
四. 利用贝叶斯优化更新模型参数
在实验进行当中,实时记录markers的位置信息(用于计算关节角度)以及外部力信息(用于计算关节力矩):
P
=
{
p
1
,
p
2
,
.
.
.
,
p
n
}
,
F
=
{
f
1
,
f
2
,
.
.
.
,
f
n
}
.
P = \{p_1, p_2, ..., p_n\},\\ F = \{ f_1, f_2, ..., f_n\}.
P={p1,p2,...,pn},F={f1,f2,...,fn}. 根据以上信息,可以依次得到关节角度信息
Q
Q
Q:
Q
=
{
q
1
,
q
2
,
.
.
.
,
q
n
}
.
Q = \{ q_1, q_2, ..., q_n\}.
Q={q1,q2,...,qn}. 肌肉激活度信息
A
A
A:
A
=
{
α
1
,
α
2
,
.
.
.
,
α
n
}
.
A = \{ \alpha_1, \alpha_2, ..., \alpha_n\}.
A={α1,α2,...,αn}. 以及肌肉能量比例信息
E
E
E。
E
=
{
ϵ
1
,
ϵ
2
,
.
.
.
,
ϵ
n
}
.
E = \{ \epsilon_1, \epsilon_2, ..., \epsilon_n\}.
E={ϵ1,ϵ2,...,ϵn}. 根据肌肉能量比例信息
E
E
E,可以计算得到肌肉的能量消耗
V
i
,
V
s
V_i,V_s
Vi,Vs:
V
i
=
1
M
(
t
i
−
t
i
−
1
)
∫
t
i
−
1
t
i
ϵ
i
˙
(
t
)
d
t
,
V
s
=
1
n
∑
i
=
1
n
V
i
.
V_i = \frac{1}{M(t_i-t_{i-1})}\int_{t_{i-1}}^{t_i}{\dot{\epsilon_i}(t)dt},\\ V_s = \frac{1}{n}\sum_{i=1}^{n}{V_i}.
Vi=M(ti−ti−1)1∫ti−1tiϵi˙(t)dt,Vs=n1i=1∑nVi. 假设外骨骼控制算法中的参数
p
i
,
i
=
1
,
2
,
3
,
4
p_i, i=1,2,3,4
pi,i=1,2,3,4与
V
s
V_s
Vs满足如下关系:
V
s
=
f
s
C
(
p
1
,
p
2
,
p
3
,
p
4
)
.
V_s = f_s^C(p_1,p_2,p_3,p_4).
Vs=fsC(p1,p2,p3,p4). 则根据贝叶斯优化,可以求得
p
i
∗
,
i
=
1
,
2
,
3
,
4
p_i^*, i=1,2,3,4
pi∗,i=1,2,3,4使得V_s最小。