转载自:http://pix.1yuav.com/wen-ti-ji-jin/fei-ji-ce-fan-yuan-yin.html
飞机侧翻原因
飞机侧翻有以下几个原因,请认真检查。
1.电机顺序,电机转向,螺旋桨错了。请认真按照飞控要求组装,这步很重要,错了一定侧翻。
例如四轴,

认真检查电机顺序,电机转向,螺旋桨,不要错了。
其他飞机类型的,参考这里,http://pix.1yuav.com/jie-kou-shuo-ming.html
2.飞控机架类型选择错了。
有些人是四轴X的,但是选择成六轴,这样是不行的。
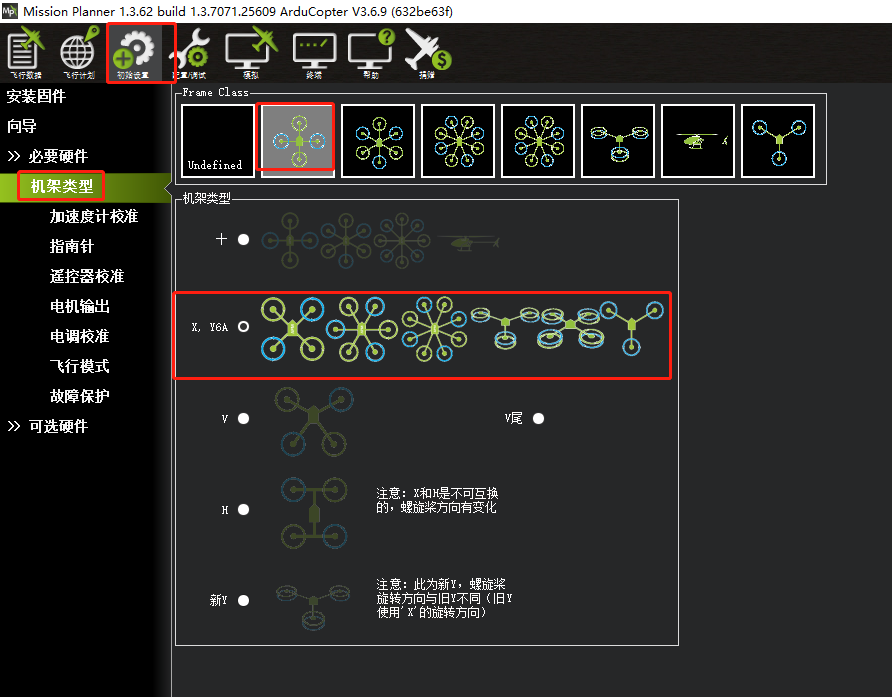 例如四轴X要这样选择,以上是针对3.5以上版本固件,如果是3.5以下固件,只需选择X后者+等。因为从3.5以上固件开始,地面站可以选四轴,六轴等,但3.5以下固件只能刷对应的机架固件,例如四轴刷四轴固件。
例如四轴X要这样选择,以上是针对3.5以上版本固件,如果是3.5以下固件,只需选择X后者+等。因为从3.5以上固件开始,地面站可以选四轴,六轴等,但3.5以下固件只能刷对应的机架固件,例如四轴刷四轴固件。
3.加速度没做好
请认真做好加速度校准和水平校准,具体参考这里,http://pix.1yuav.com/ru-he-xiao-zhun-jia-su-du.html
4.电机不同步
飞控解锁后,不推油门的情况下,必须确保所有的电机都同时转起来。不可以出现推油门后某个电机才转,不可以出现某些电机明显慢,某些明显快。如果不是,就是电机不同步,要做电调油门校准。
具体参考这里:http://pix.1yuav.com/wen-ti-ji-jin/jie-suo-hou-mou-ge-dian-ji-bu-zhuan-de-wen-ti.html
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)