四层板变成两层板原本思路是:从原理图导出一份asc文件,将原先四层板的PCB封装全部保存到一个库里面去,然后在PADS里导入asc文件,然后将原先的结构定位从原来的PCB板上复制过来,但后来一想,这一下导过来复制过去会很繁琐,又要重新定位,打孔,画板框甚至还会出错,如果某些元器件结构定位偏移过多和保存到库里的封装有错误的话,导致后期组装和焊接出现问题,那一来一回时间就长了。
后来一搜,发现网上有现成的四层板变两层板教学,然后试了一下,发现改动点比较少,值得一试。
步骤:
第一步:用PADS软件打开即将需要转换的PCB文件。
第二步:点击文件→导出,保存为DXF文件,取名随意,然后保存。
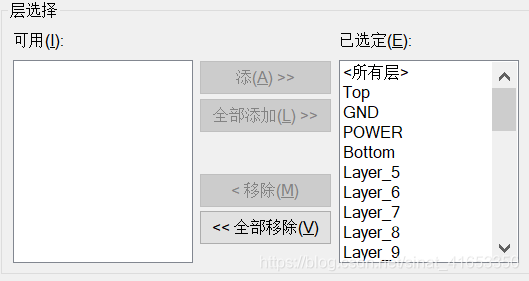
第三步:弹出DXF导出对话框,在下图的层选择中将GND和POWER层选中,然后移除,别的不需要做任何修改,然后点击确定。
第四步:重新打开PADS文件,点击文件→导入,在对话框中选择刚才保存的DXF文件,然后点击打开。
第五步:跳出DXF导入对话框,什么都不用操作,直接点确定,然后出现层名称重复报警,不要理会,点确定。
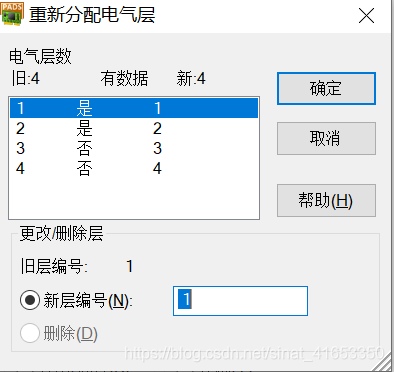
第六步:待加载完成后点击设置→层定义,在电器层点击重新分配,将第二层和第四层互换层数,一定要保证出现电气层1和2都是有数据的。
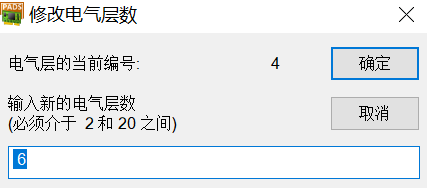
第七步:点击电气层的修改,将层数修改为两层,然后确定。
第八步:点击非电气层的启用/禁用,将3和4两层启用前面的小方框的√给打上,然后就可以看到熟悉的两层板结构。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)