px4飞行日志为.bin文件或者.log文件,将文件数据导入到flightplot中,输出轨迹(export track),下载一个Google地图,将保存成的文件在Google地图里面打开,即可得到飞行轨迹以及对应的地点。
export track设置:

得到的飞行轨迹:

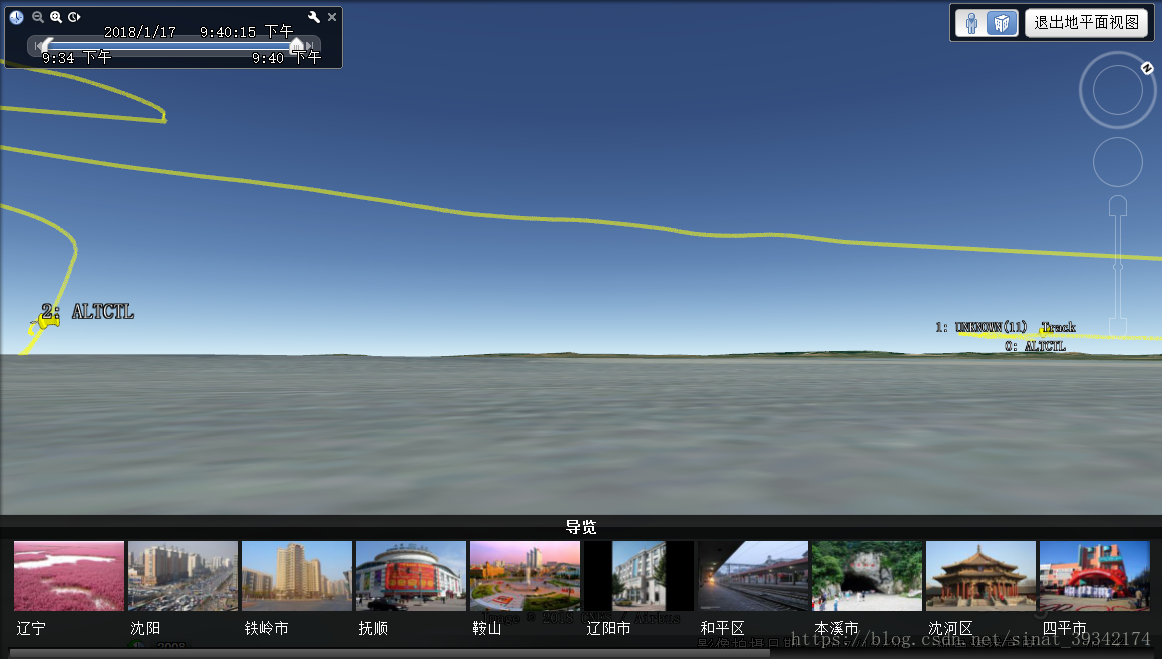
通过Google地图可以以第一视角来追踪飞行轨迹,但是图像不是特别清晰。
其他的飞行数据可以在flightplot中读取。
附flightplot的软件
不太会发,后续会附上
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)