本文是百问网七天物联网智能家居训练营学习笔记,官网链接。
1 程序流程回顾
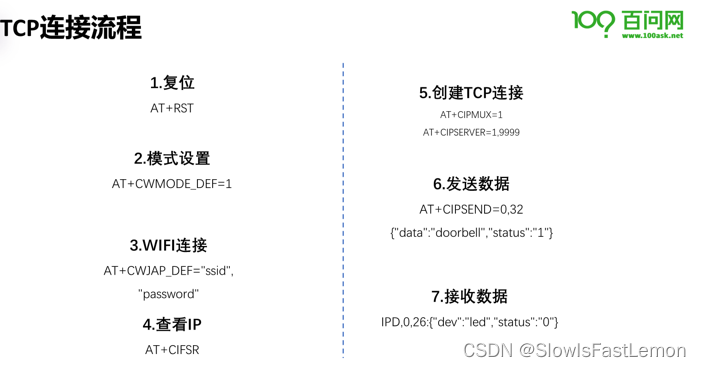
先来回顾下TCP连接的流程:
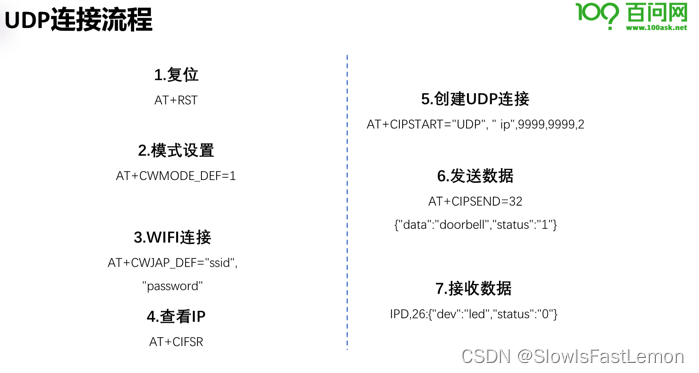
下面看下UDP连接的流程:
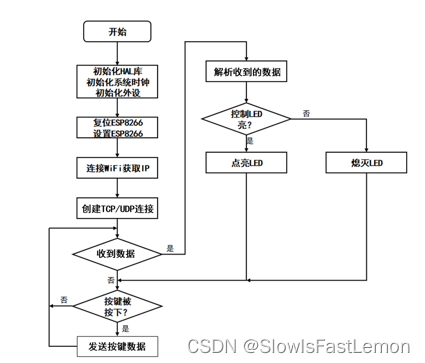
整个程序的框架如下:
2 代码实现
这里我们使用串口2来操作,下面先实现串口2的基本操作:
static uint8_t rx_len;
static uint8_t rx_data;
static uint8_t usart_rx_buf[200];
void USART2_StartRx(void)
{
HAL_UART_Receive_IT(&huart2, (uint8_t*)&rx_data, 1);
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
usart_rx_buf[rx_len%200] = rx_data;
rx_len++;
HAL_UART_Receive_IT(&huart2, (uint8_t*)&rx_data, 1);
}
uint16_t USART2_Receive(uint8_t *pdata)
{
memcpy(pdata, (uint8_t*)usart_rx_buf, rx_len);
return rx_len;
}
void USART2_Transmit(uint8_t *pData, uint16_t Size, uint32_t Timeout)
{
HAL_UART_Transmit(&huart2, pData, Size, Timeout);
}
void USART2_ClearBuf(void)
{
rx_len = 0;
memset((uint8_t*)usart_rx_buf, 0, 200);
}
注意我们这里使用了一个数组来接收串口收到的数据,使用完数据记得及时调用Clear函数清除,否则可能导致缓冲区溢出,从而出现意料之外的情况发生。
下面我们来封装命令发送的函数,因为我们要判断返回的结果,所以这里采用死等的方式,其实裸机这么设计程序是有点问题的,会导致实时性变差,不过在要求不高的场合是可以这么处理的,下面看下实现代码:
uint8_t ESP8266_SendCommand(char *cmd, char *reply, uint16_t timeout)
{
char buf[256] = {0};
strcat(buf, cmd);
if (strstr(buf, "\r\n") == 0)
{
strcat(buf, "\r\n");
}
USART2_ClearBuf();
USART2_Transmit((uint8_t *)buf, strlen(buf), 500);
memset(buf, 0, 256);
while(timeout != 0)
{
if(USART2_Receive((uint8_t *)buf))
{
if (strstr(buf, reply))
{
printf("%s Send ok!\r\n", cmd);
if (strstr(buf, "CIFSR"))
printf("%s\r\n", buf);
return 0;
}
else
{
timeout--;
HAL_Delay(1);
}
}
}
printf("%s Send error!\r\n", cmd);
return 1;
}
uint8_t ESP8266_Send_TCP(char *data)
{
char buf[256] = {0};
uint8_t len = strlen(data);
sprintf(buf, "AT+CIPSEND=0,%d\r\n", len);
if (ESP8266_SendCommand(buf, "OK", 500) == 0)
{
ESP8266_SendCommand(data, "OK", 1000);
return 0;
}
return 1;
}
最后我们再来看下main函数的实现:
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_USART2_UART_Init();
MX_NVIC_Init();
uint8_t rx_data[200] = {0};
USART2_StartRx();
ESP8266_SendCommand("AT+RST", "OK", 500);
HAL_Delay(1000);
ESP8266_SendCommand("AT+CWMODE=1", "OK", 500);
ESP8266_SendCommand("AT+CWJAP=\"100ask\",\"100ask100ask\"", "OK", 5000);
ESP8266_SendCommand("AT+CIPMUX=1", "OK", 500);
ESP8266_SendCommand("AT+CIPSERVER=1,9999", "OK", 500);
ESP8266_SendCommand("AT+CIFSR", "OK", 500);
while (1)
{
if (Key_GetFlag() == 1)
{
ESP8266_Send_TCP("{\"data\":\"doorbell\",\"status\":\"1\"}");
}
if (USART2_Receive(rx_data))
{
if (strstr((char *)rx_data, "\"dev\":\"led\",\"status\":\"0\""))
{
printf("led off\n\r");
HAL_GPIO_WritePin(LED_GPIO_Port, LED_Pin, GPIO_PIN_SET);
USART2_ClearBuf();
memset(rx_data, 0, 200);
}
else if (strstr((char *)rx_data, "\"dev\":\"led\",\"status\":\"1\""))
{
printf("led on\n\r");
HAL_GPIO_WritePin(LED_GPIO_Port, LED_Pin, GPIO_PIN_RESET);
USART2_ClearBuf();
memset(rx_data, 0, 200);
}
}
}
}
整个程序逻辑实现还是比较简单的,我们需要注意的就是在实现发送命令时添加了超时机制,这个超时机制的应用范围还是很广的,所以一定要掌握!
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)