一、课程前提

自动驾驶汽车即将成为交通出行的主流工具之一,它以计算机、现代汽车产业技术为基础,以数字化、智能化为依托实现自动化驾驶,学习自动驾驶需要了解架构、环境感知、行为决策、规划路径,多传感器融合等一系列技术,各种开源框架、功能包、学习路线图,已经让想从事行业的小伙伴已经挑花了眼,那么不如先来了解参加F1TENTH无人车竞速赛怎么从零开始制作一台自动驾驶小车。
F1TENTH无人车竞速赛是一项国际级赛事,最初于2016年在宾夕法尼亚大学成立,扩展到全球多所高校、科研机构等,是一个由研究人员、工程师和爱好者组成的国际化社区,比赛通过将1:10仿真模型车经过机械、电子、算法改装为无人车进行的竞速比赛,鼓励参赛选手将代码开源促进社区发展壮大。
2022 F1TENTH无人车竞速赛由西北工业大学无人系统技术研究院承办,属于2022年国际自主无人系统大会(ICAUS 2022)的“爱生杯”智能无人系统应用挑战赛赛项之一,天之博特负责本次赛事相关技术支持。
为了让大家更快的熟悉赛事规则制作好可以参加比赛的车辆,掌握自主无人系统理论,提高实操能力,天之博特开源《从零开始制作ROS无人竞速车RACECAR教程》系列教程。
二、讲师简介

电子羊(张智豪-21岁-学生)
黑龙江科技大学
二次元深度沉迷玩家
代码累积超过114514行
曾在航天三院ai航项目组实习
有丰富的科研经历,参与过荔湾区数字孪生及三维重建项目
三、适用群体
-
F1TENTH无人车竞速赛参赛队;
-
零基础或有ROS、Linux基础的学生;
-
高校开展自动驾驶、无人车课程的青年教师;
-
从事无人车算法研发的实验室、研究人员;
-
ROS机器人操作系统开发者及爱好者;
四、学习方式
本系列课程免费,采取录播学习+交流群答疑的方式,学习中遇到的问题,可在交流群中提出,会有专业的工程师在线答疑。
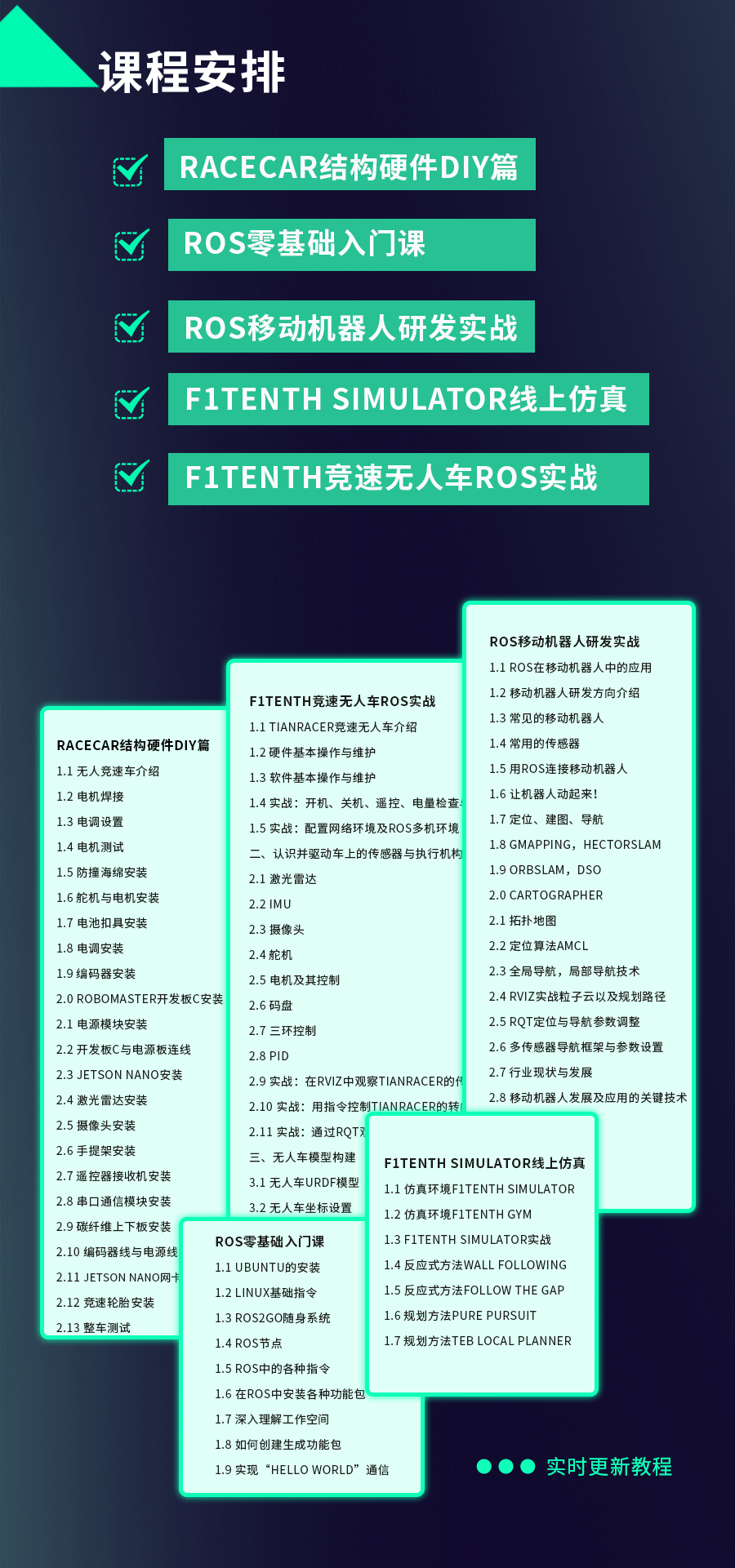
五、课程大纲
六、学习收获
-
F1tenth无人车竞赛做知识储备;
-
掌握无人车相关硬件结构知识;
-
掌握ROS移动机器人的开发框架及编程模式;
-
掌握Navigation中Move_Base导航框架应用方式;
-
掌握无人驾驶系统中常用传感器及其融合技术;
-
掌握移动机器人SLAM技术框架: 定位、建图、导航;
-
掌握ROS机器人操作系统的使用技巧;
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)