第四章、用xacro优化URDF并配置gazebo仿真插件
1►前言
上节用简易模型写了一个小车的URDF代码,这一节将用xacro对其进行优化,这里我并不打算用宏对参数进行封装,因为我个人觉得这样看起来会比较直观,方便读者阅读。
2►配置主xacro文件
新建racecar.xacro文件,将上一节racebot.urdf中的代码复制过来并进行修改,整体代码如下:
<?xml version="1.0" encoding="utf-8"?>
<robot name="racebot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="$(find racebot_description)/urdf/ackermann/macros.xacro" />
<link name="base_footprint">
</link>
<link name="base_link">
<visual>
<geometry>
<box size="0.28 0.1 0.03"/>
<!-- <mesh filename="package://tianracer_description/meshes/base_link.STL" /> -->
</geometry>
<!-- <origin xyz="0 0 -0.023" rpy="0 0 0" /> -->
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="yellow">
<color rgba="0.8 0.3 0.1 0.5" />
</material>
</visual>
<collision>
<geometry>
<box size="0.28 0.1 0.03" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
</collision>
</link>
<joint name="base_link2base_footprint" type="fixed">
<parent link="base_footprint" />
<child link="base_link"/>
<origin xyz="0 0 0.032" rpy="0 0 0" />
</joint>
<link name="base_inertia">
<inertial>
<origin xyz="0 0 0" />
<mass value="4" />
<inertia ixx="0.0264" ixy="0" ixz="0" iyy="0.0294" iyz="0" izz="0.00364" />
</inertial>
</link>
<joint name="chassis_inertia_joint" type="fixed">
<origin xyz="0 0 0" rpy="0 0 0" />
<parent link="base_link" />
<child link="base_inertia" />
</joint>
<link name="left_steering_hinge">
<visual>
<geometry>
<cylinder radius="0.01" length="0.005" />
<!-- <sphere radius="0.015" /> -->
</geometry>
<origin xyz="0 0 0" rpy="1.57 0 0" />
<material name="black">
<color rgba="0.0 0.0 0.0 1.0" />
</material>
</visual>
<collision>
<geometry>
<cylinder radius="0.01" length="0.005" />
<!-- <sphere radius="0.015" /> -->
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="1.57 0.0 0.0" />
</collision>
<inertial>
<origin xyz="0 0 0" />
<mass value="0.5" />
<inertia ixx="1.35E-05" ixy="0" ixz="0" iyy="1.35E-05" iyz="0" izz="2.5E-05" />
</inertial>
</link>
<joint name="left_steering_hinge_joint" type="revolute">
<parent link="base_link" />
<child link="left_steering_hinge" />
<origin xyz="0.13 0.065 0" />
<axis xyz="0 0 1" />
<limit lower="-0.6" upper="0.6" effort="5.0" velocity="1000.0"/>
</joint>
<xacro:steering_hinge_transmission name="left_steering_hinge" />
<link name="left_front_wheel">
<visual>
<geometry>
<cylinder radius="0.033" length="0.02" />
</geometry>
<origin xyz="0 0 0" rpy="1.57 0 0" />
<material name="black">
<color rgba="0.0 0.0 0.0 1.0" />
</material>
</visual>
<collision>
<geometry>
<cylinder radius="0.032" length="0.02" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="1.57 0.0 0.0" />
</collision>
<inertial>
<origin xyz="0 0 0" />
<mass value="2.0" />
<inertia ixx="6.64E-04" ixy="0" ixz="0" iyy="6.64E-04" iyz="0" izz="1.02E-03" />
</inertial>
</link>
<joint name="left_front_wheel_joint" type="continuous">
<parent link="left_steering_hinge" />
<child link="left_front_wheel" />
<origin xyz="0 0.025 0" />
<axis xyz="0 1 0" />
<limit effort="10" velocity="1000" />
</joint>
<xacro:wheel_transmission name="left_front_wheel" />
<link name="right_steering_hinge">
<visual>
<geometry>
<cylinder radius="0.01" length="0.005" />
</geometry>
<origin xyz="0 0 0" rpy="1.57 0 0" />
<material name="black">
<color rgba="0.0 0.0 0.0 1.0" />
</material>
</visual>
<collision>
<geometry>
<cylinder radius="0.01" length="0.005" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="1.57 0.0 0.0" />
</collision>
<inertial>
<origin xyz="0 0 0" />
<mass value="0.5" />
<inertia ixx="1.35E-05" ixy="0" ixz="0" iyy="1.35E-05" iyz="0" izz="2.5E-05" />
</inertial>
</link>
<joint name="right_steering_hinge_joint" type="revolute">
<parent link="base_link" />
<child link="right_steering_hinge" />
<origin xyz="0.13 -0.065 0" />
<axis xyz="0 0 1" />
<limit lower="-0.6" upper="0.6" effort="5.0" velocity="1000.0"/>
</joint>
<xacro:steering_hinge_transmission name="right_steering_hinge" />
<link name="right_front_wheel">
<visual>
<geometry>
<cylinder radius="0.033" length="0.02" />
</geometry>
<origin xyz="0 0 0" rpy="1.57 0 0" />
<material name="black">
<color rgba="0.0 0.0 0.0 1.0" />
</material>
</visual>
<collision>
<geometry>
<cylinder radius="0.032" length="0.02" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="1.57 0.0 0.0" />
</collision>
<inertial>
<origin xyz="0 0 0" />
<mass value="2.0" />
<inertia ixx="6.64E-04" ixy="0" ixz="0" iyy="6.64E-04" iyz="0" izz="1.02E-03" />
</inertial>
</link>
<joint name="right_front_wheel_joint" type="continuous">
<parent link="right_steering_hinge" />
<child link="right_front_wheel" />
<origin xyz="0 -0.025 0" />
<axis xyz="0 1 0" />
<limit effort="10" velocity="1000" />
</joint>
<xacro:wheel_transmission name="right_front_wheel" />
<link name="left_rear_wheel">
<visual>
<geometry>
<cylinder radius="0.032" length="0.02" />
</geometry>
<origin xyz="0 0 0" rpy="1.57 0 0" />
<material name="black">
<color rgba="0.0 0.0 0.0 1.0" />
</material>
</visual>
<collision>
<geometry>
<cylinder radius="0.032" length="0.02" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="1.57 0.0 0.0" />
</collision>
<inertial>
<origin xyz="0 0 0" />
<mass value="2.0" />
<inertia ixx="6.64E-04" ixy="0" ixz="0" iyy="6.64E-04" iyz="0" izz="1.02E-03" />
</inertial>
</link>
<joint name="left_rear_wheel_joint" type="continuous">
<parent link="base_link" />
<child link="left_rear_wheel" />
<origin xyz="-0.13 0.09 0" />
<axis xyz="0 1 0" />
<limit effort="10" velocity="1000" />
</joint>
<xacro:wheel_transmission name="left_rear_wheel" />
<link name="right_rear_wheel">
<visual>
<geometry>
<cylinder radius="0.032" length="0.02" />
</geometry>
<origin xyz="0 0 0" rpy="1.57 0 0" />
<material name="black">
<color rgba="0.0 0.0 0.0 1.0" />
</material>
</visual>
<collision>
<geometry>
<cylinder radius="0.032" length="0.02" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="1.57 0.0 0.0" />
</collision>
<inertial>
<origin xyz="0 0 0" />
<mass value="2.0" />
<inertia ixx="6.64E-04" ixy="0" ixz="0" iyy="6.64E-04" iyz="0" izz="1.02E-03" />
</inertial>
</link>
<joint name="right_rear_wheel_joint" type="continuous">
<parent link="base_link" />
<child link="right_rear_wheel" />
<origin xyz="-0.13 -0.09 0" />
<axis xyz="0 1 0" />
<limit effort="10" velocity="1000" />
</joint>
<xacro:wheel_transmission name="right_rear_wheel" />
<link name="camera">
<visual>
<geometry>
<box size="0.005 0.03 0.03"/>
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="black">
<color rgba="0.0 0.0 0.0 1.0" />
</material>
</visual>
<collision>
<geometry>
<box size="0.005 0.03 0.03"/>
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
</collision>
<inertial>
<origin xyz="0 0 0" />
<mass value="0.05" />
<inertia ixx="6.64E-04" ixy="0" ixz="0" iyy="6.64E-04" iyz="0" izz="1.02E-03" />
</inertial>
</link>
<joint name="camera_joint" type="fixed">
<parent link="base_link" />
<child link="camera" />
<origin xyz="0.14851 0.0022137 0.0975" />
<axis xyz="0 0 1" />
</joint>
<link name="real_sense">
<visual>
<geometry>
<box size="0.01 0.1 0.02"/>
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="black">
<color rgba="0.0 0.0 0.0 1.0" />
</material>
</visual>
<collision>
<geometry>
<box size="0.01 0.1 0.02"/>
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
</collision>
<inertial>
<origin xyz="0 0 0" />
<mass value="0.05" />
<inertia ixx="6.64E-04" ixy="0" ixz="0" iyy="6.64E-04" iyz="0" izz="1.02E-03" />
</inertial>
</link>
<joint name="realsense_joint" type="fixed">
<parent link="base_link" />
<child link="real_sense" />
<origin xyz="0.19864 0.0038046 0.052021" />
<axis xyz="0 0 1" />
</joint>
<link name="lidar">
<visual>
<geometry>
<cylinder radius="0.03" length="0.06" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="black">
<color rgba="0.0 0.0 0.0 1.0" />
</material>
</visual>
<collision>
<geometry>
<cylinder radius="0.03" length="0.06" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
</collision>
<inertial>
<origin xyz="0 0 0" />
<mass value="0.1" />
<inertia ixx="6.64E-04" ixy="0" ixz="0" iyy="6.64E-04" iyz="0" izz="1.02E-03" />
</inertial>
</link>
<joint name="lidar_joint" type="fixed">
<parent link="base_link" />
<child link="lidar" />
<origin xyz="0.093603 0 0.12377" />
<axis xyz="0 0 1" />
</joint>
<link name="imu">
<visual>
<geometry>
<box size="0.01 0.01 0.005"/>
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="black">
<color rgba="0.0 0.0 0.0 1.0" />
</material>
</visual>
<collision>
<geometry>
<box size="0.01 0.01 0.005"/>
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
</collision>
<inertial>
<origin xyz="0 0 0" />
<mass value="0.05" />
<inertia ixx="6.64E-04" ixy="0" ixz="0" iyy="6.64E-04" iyz="0" izz="1.02E-03" />
</inertial>
</link>
<joint name="imu_joint" type="fixed">
<parent link="base_link" />
<child link="imu" />
<origin xyz="0 0 0.02" />
<axis xyz="0 0 1" />
</joint>
<xacro:include filename="$(find racebot_description)/urdf/ackermann/racecar.gazebo" />
</robot>
代码起始和末尾添加了两个文件,通过xacro封装引用进来。这两个xacro文件是接下去要配置的传动文件macros.xacro以及gazebo插件racecar.gazebo。
3►添加传动transmission
创建macro.xacro文件,该代码给前后轮以及前轮摆转配置了传动transmission元素,代码如下:
<?xml version="1.0"?>
<robot name="racebot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<!-- transmission macros -->
<xacro:macro name="wheel_transmission" params="name">
<transmission name="${name}_transmission" type="SimpleTransmission">
<type>transmission_interface/SimpleTransmission</type>
<joint name="${name}_joint">
<hardwareInterface>hardware_interface/EffortJointInterface</hardwareInterface>
</joint>
<actuator name="${name}_motor">
<hardwareInterface>hardware_interface/EffortJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
</xacro:macro>
<xacro:macro name="steering_hinge_transmission" params="name">
<transmission name="${name}_transmission" type="SimpleTransmission">
<type>transmission_interface/SimpleTransmission</type>
<joint name="${name}_joint">
<hardwareInterface>hardware_interface/EffortJointInterface</hardwareInterface>
</joint>
<actuator name="${name}_motor">
<hardwareInterface>hardware_interface/EffortJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
</xacro:macro>
</robot>
值得注意的是,引用该文件时,要将路径代码放置到racecar.xacro代码的最上端位置,如上代码所示,否则将无法引用到,并且在需要添加传动的link后面添加宏定义,以左前轮以及左前轮摆转为例:
<xacro:wheel_transmission name="left_front_wheel" />
.
.
.
<xacro:steering_hinge_transmission name="right_steering_hinge" />
4►配置gazebo插件
要让小车在gazebo中仿真,并且让小车能够进行建图导航,需要给小车的摄像头,激光雷达等link添加传感器插件,下面将进行配置,新建racecar.gazebo文件,开头代码:
<?xml version="1.0"?>
<robot name="racebot" xmlns:xacro="http://www.ros.org/wiki/xacro">
。
。
。
</robot>
配置各个link的颜色:
由于车轮实际上会接触地面,因此会与地面发生物理相互作用,将各个link添加部件材料的附加信息,并且定义各个link的颜色信息。参考gazebo官网 :http://gazebosim.org/tutorials/?tut=ros_urdf
<!-- Gazebo references -->
<gazebo reference="base_link">
<mu1 value="0.0"/>
<mu2 value="0.0"/>
<kp value="10000000.0" />
<kd value="1.0" />
<material>Gazebo/Red</material>
</gazebo>
<gazebo reference="left_rear_wheel">
<mu1 value="2.0"/>
<mu2 value="2.0"/>
<kp value="10000000.0" />
<kd value="1.0" />
<fdir1 value="1 0 0"/>
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="right_rear_wheel">
<mu1 value="2.0"/>
<mu2 value="2.0"/>
<kp value="10000000.0" />
<kd value="1.0" />
<fdir1 value="1 0 0"/>
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="left_front_wheel">
<mu1 value="2.0"/>
<mu2 value="2.0"/>
<kp value="10000000.0" />
<kd value="1.0" />
<fdir1 value="0 0 1"/>
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="right_front_wheel">
<mu1 value="2.0"/>
<mu2 value="2.0"/>
<kp value="10000000.0" />
<kd value="1.0" />
<fdir1 value="0 0 1"/>
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="lidar">
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="camera">
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="real_sense">
<material>Gazebo/Grey</material>
</gazebo>
配置ros_control:
由于gazebo并没阿克曼车型的插件,要链接gazebo与ros,我们先添加ros_control插件,它读取所有transmission标记,以及joint_state_publisher插件。
<!-- Gazebo Plugins -->
<gazebo>
<plugin name="gazebo_ros_control" filename="libgazebo_ros_control.so">
<robotNamespace>/racebot</robotNamespace>
<robotParam>robot_description</robotParam>
<robotSimType>gazebo_ros_control/DefaultRobotHWSim</robotSimType>
<legacyModeNS>true</legacyModeNS>
</plugin>
</gazebo>
注意命名空间要设置为/racebot。
配置激光雷达插件:
<!-- hokuyo -->
<gazebo reference="lidar">
<material>Gazebo/Grey</material>
<sensor type="ray" name="hokuyo_sensor">
<pose>0 0 0.0124 0 0 0</pose>
<visualize>false</visualize>
<update_rate>40</update_rate>
<ray>
<scan>
<horizontal>
<samples>1081</samples>
<resolution>1</resolution>
<min_angle>-2.3561944902</min_angle>
<max_angle>2.3561944902</max_angle>
</horizontal>
</scan>
<range>
<min>0.1</min>
<max>10.0</max>
<resolution>0.01</resolution>
</range>
<noise>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<plugin name="gazebo_ros_hokuyo_controller" filename="libgazebo_ros_laser.so">
<topicName>/scan</topicName>
<frameName>lidar</frameName>
</plugin>
</sensor>
</gazebo>
配置深度相机插件:
由于配置realsense插件过于复杂,因此这里用kinect插件来代替realsense插件。
<gazebo reference="real_sense">
<sensor type="depth" name="real_sense">
<always_on>true</always_on>
<update_rate>20.0</update_rate>
<camera>
<horizontal_fov>${60.0*3.14/180.0}</horizontal_fov>
<image>
<format>R8G8B8</format>
<width>640</width>
<height>480</height>
</image>
<clip>
<near>0.05</near>
<far>8.0</far>
</clip>
</camera>
<plugin name="kinect_real_sense_controller" filename="libgazebo_ros_openni_kinect.so">
<cameraName>real_sense</cameraName>
<alwaysOn>true</alwaysOn>
<updateRate>10</updateRate>
<imageTopicName>rgb/image_raw</imageTopicName>
<depthImageTopicName>depth/image_raw</depthImageTopicName>
<pointCloudTopicName>depth/points</pointCloudTopicName>
<cameraInfoTopicName>rgb/camera_info</cameraInfoTopicName>
<depthImageCameraInfoTopicName>depth/camera_info</depthImageCameraInfoTopicName>
<frameName>real_sense</frameName>
<baseline>0.1</baseline>
<distortion_k1>0.0</distortion_k1>
<distortion_k2>0.0</distortion_k2>
<distortion_k3>0.0</distortion_k3>
<distortion_t1>0.0</distortion_t1>
<distortion_t2>0.0</distortion_t2>
<pointCloudCutoff>0.4</pointCloudCutoff>
</plugin>
</sensor>
</gazebo>
配置单目相机插件:
<!-- camera -->
<gazebo reference="camera">
<material>Gazebo/Grey</material>
<sensor type="camera" name="camera">
<update_rate>30.0</update_rate>
<camera name="camera">
<horizontal_fov>1.3962634</horizontal_fov>
<image>
<width>800</width>
<height>800</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.02</near>
<far>300</far>
</clip>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.007</stddev>
</noise>
</camera>
<plugin name="camera_controller" filename="libgazebo_ros_camera.so">
<alwaysOn>true</alwaysOn>
<updateRate>0.0</updateRate>
<cameraName>rrbot/camera1</cameraName>
<imageTopicName>image_raw</imageTopicName>
<cameraInfoTopicName>camera_info</cameraInfoTopicName>
<frameName>camera</frameName>
<hackBaseline>0.07</hackBaseline>
<distortionK1>0.0</distortionK1>
<distortionK2>0.0</distortionK2>
<distortionK3>0.0</distortionK3>
<distortionT1>0.0</distortionT1>
<distortionT2>0.0</distortionT2>
</plugin>
</sensor>
</gazebo>
配置imu插件:
<gazebo reference="imu">
<material>Gazebo/Orange</material>
<gravity>true</gravity>
<sensor name="imu_sensor" type="imu">
<always_on>true</always_on>
<update_rate>100</update_rate>
<visualize>true</visualize>
<topic>__default_topic__</topic>
<plugin filename="libgazebo_ros_imu_sensor.so" name="imu_plugin">
<topicName>imu</topicName>
<bodyName>imu</bodyName>
<updateRateHZ>100.0</updateRateHZ>
<gaussianNoise>0.0</gaussianNoise>
<xyzOffset>0 0 0</xyzOffset>
<rpyOffset>0 0 0</rpyOffset>
<frameName>imu_link</frameName>
</plugin>
<pose>0 0 0 0 0 0</pose>
</sensor>
</gazebo>
5►配置gazebo插件在gazebo中显示并演示传感器效果
创建racebot_gazebo功能包,并创建如下文件夹:
在launch文件夹中创建racebot.launch文件:
<?xml version="1.0"?>
<launch>
<!-- 设置launch文件的参数 -->
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!--模型车的起点放置位置-->
<arg name="x_pos" default="0"/>
<arg name="y_pos" default="0"/>
<arg name="z_pos" default="0"/>
<arg name="R_pos" default="0"/>
<arg name="P_pos" default="0"/>
<arg name="Y_pos" default="0"/>
<!--运行gazebo仿真环境-->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
<arg name="world_name" value="$(find racebot_gazebo)/worlds/room_mini.world"/>
<!-- .world文件的地址-->
</include>
<!-- 加载机器人模型描述参数 -->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find racebot_description)/urdf/ackermann/racecar.xacro'"/>
<!-- 在gazebo中加载机器人模型-->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model racebot -param robot_description -x $(arg x_pos) -y $(arg y_pos) -z $(arg z_pos) -R $(arg R_pos) -P $(arg P_pos) -Y $(arg Y_pos)"/>
<!-- <node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model tianracer -param robot_description -x $(arg x_pos) -y $(arg y_pos) -z $(arg z_pos)"/> -->
<!-- ros_control racecar launch file -->
<!--Launch the simulation joystick control-->
<!-- <node pkg="tf2_ros" type="static_transform_publisher" name="static_transform_publisher" args="0 0 0 -1.57 0 -1.57 /real_sense /real_sense_depth" /> -->
</launch>
在worlds文件夹中,将之前用于mini小车仿真的room_mini.world文件放入,使得racebot载入有room_mini地图的gazebo仿真环境中。
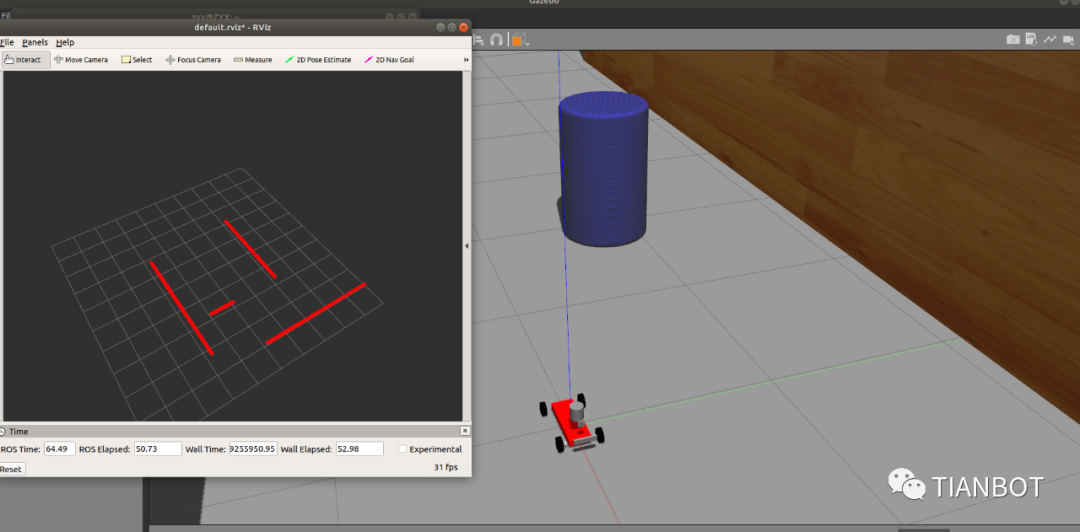
roslaunch racebot_gazebo racebot.launch


可以看到小车已经加载到gazebo环境中,然而此时无法控制小车运动,因为还未配置controllers,但是我们可以读取到传感器参数。
读取imu参数:
rostopic echo /imu

读取雷达数据:
打开rviz
rviz
将fixed_frame改为base_footprint, 点击add-->by topic-->laserScan,此时在rviz中即可显示雷达点云
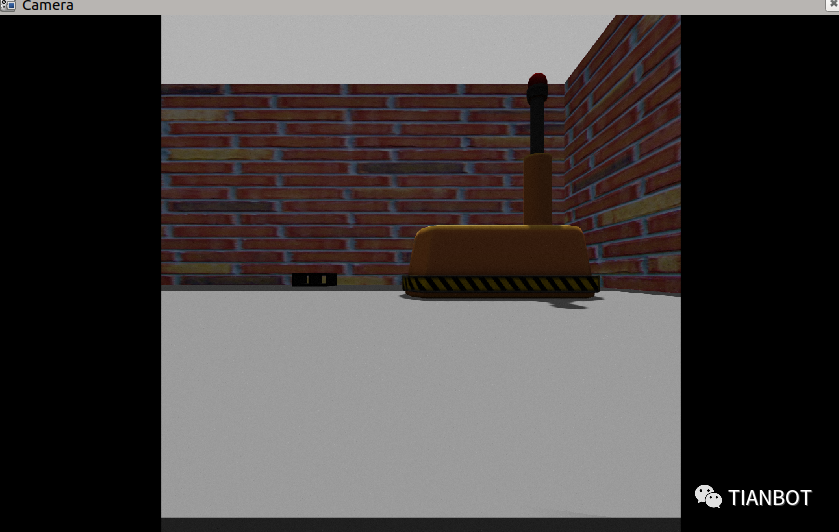
单目摄像头:
在rviz中add-->by topic-->/rrbot/camera1/image_raw/camera即可添加相机插件,并显示图像:
深度摄像头:
深度摄像头查看深度图像与单目摄像头同理add-->by topic-->realsense/depth/image_raw/camera

只是在添加pointcloud2时会出现问题,add-->by topic-->realsense/depth/points/pointcloud2,会发现彩色点云出现在小车正上方,原因是在kinect中图像数据与点云数据使用了两套坐标系统,且两套坐标系统位姿并不一致。

解决方法有两种:
1.可以在launch文件中加入坐标变换,即可解决这一现象。
<node pkg="tf2_ros" type="static_transform_publisher" name="static_transform_publisher" args="0 0 0 -1.57 0 -1.57 /support /support_depth" />
详细参考奥特学园《kinect信息仿真以及显示》https://sourl.cn/ziwDEU
2.第二种方法是在urdf中加入新的link,即使用点云数据的link,并通过joint做坐标变换来解决。
<link name="realsense_depth"/>
<joint name="realsense_depth_joint" type="fixed">
<origin xyz="0 0 0" rpy="-1.5708 0 -1.5708"/>
<parent link="real_sense"/>
<child link="realsense_depth"/>
</joint>
修改插件
<gazebo reference="real_sense">
<sensor type="depth" name="real_sense">
<always_on>true</always_on>
<update_rate>20.0</update_rate>
<camera>
<horizontal_fov>${60.0*3.14/180.0}</horizontal_fov>
<image>
<format>R8G8B8</format>
<width>640</width>
<height>480</height>
</image>
<clip>
<near>0.05</near>
<far>8.0</far>
</clip>
</camera>
<plugin name="kinect_real_sense_controller" filename="libgazebo_ros_openni_kinect.so">
<cameraName>real_sense</cameraName>
<alwaysOn>true</alwaysOn>
<updateRate>10</updateRate>
<imageTopicName>rgb/image_raw</imageTopicName>
<depthImageTopicName>depth/image_raw</depthImageTopicName>
<pointCloudTopicName>depth/points</pointCloudTopicName>
<cameraInfoTopicName>rgb/camera_info</cameraInfoTopicName>
<depthImageCameraInfoTopicName>depth/camera_info</depthImageCameraInfoTopicName>
<frameName>realsense_depth</frameName>
<baseline>0.1</baseline>
<distortion_k1>0.0</distortion_k1>
<distortion_k2>0.0</distortion_k2>
<distortion_k3>0.0</distortion_k3>
<distortion_t1>0.0</distortion_t1>
<distortion_t2>0.0</distortion_t2>
<pointCloudCutoff>0.4</pointCloudCutoff>
</plugin>
</sensor>
</gazebo>

6►小结
本节内容关于小车传动的添加,以及配置了小车上面的一些插件,下一节内容,通过配置controller让小车动起来。
参考资料:
1.古月老师的《ROS机器人开发实践》
2.奥特学园《6.7.4 kinect信息仿真以及显示》https://sourl.cn/ziwDEU
3.gazebo官网 http://gazebosim.org/tutorials/?tut=ros_urdf
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)