一 ardupilot固件
windows环境
前期准备
1:pix烧录程序,Arducopter或者library中的example都可以实现。
2:拔掉SD卡(脚本中提到的没有SD卡进入nsh,有SD时进入MAVLINK,因此会出现一段乱码)。
step1:
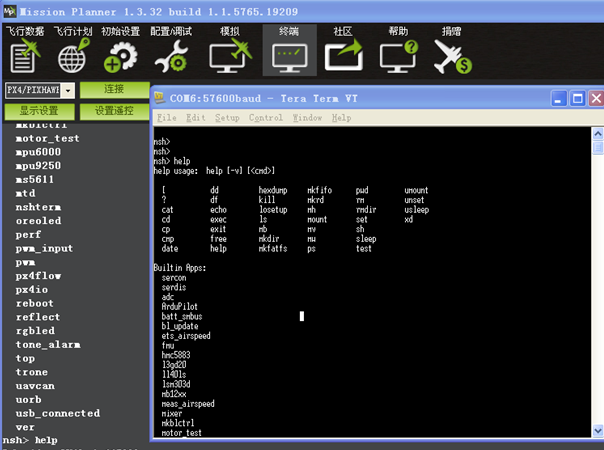
连接usb,待音乐想玩后,打开TeraTerm,选择fiel,建立新连接,选择usb的端口,我的是com6,波特率选择57600,敲击回车键,出现nsh>
step 2:
?或help命令可获得详细信息
在官网的CodeBase中提到了ps命令可获得当前线程

Linux环境
环境:ubuntu14.04LTS
前期准备
1:pix烧录程序,Arducopter或者library中的example都可以实现。
2:拔掉SD卡(脚本中提到的没有SD卡进入nsh,有SD时进入MAVLINK,因此会出现一段乱码)。
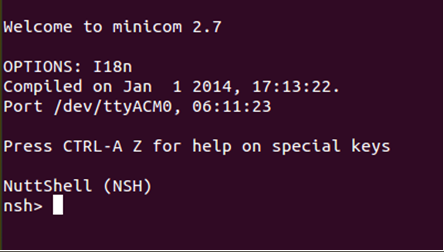
3:下载minicom,命令minicom -s配置minicon,配置为dev/ttyACM0(ttyACM0一般代表usb设备)。
step 1:
pix通过usb连接linux,终端上输入minicom,进入nsh,退出minicom:ctrl+A,然后q
二 PX4固件
Linux环境
前期准备与ardupilot下一样
step1:烧写PX4固件到pixhawk,连接飞控
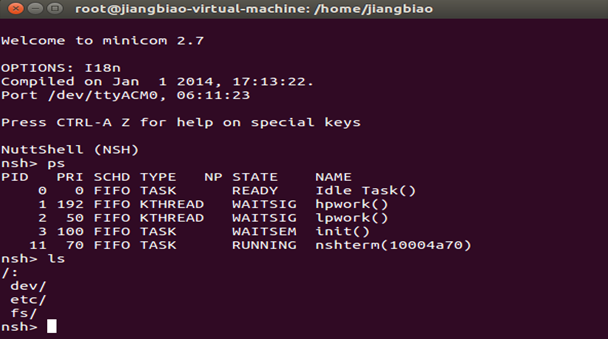
step2:进入minicom
step3:?查看详细信息,进行相关测试,如下
三 问题解决
(1) linux下连接pix时,无法检测到pix。在虚拟机下,选择VM菜单,选择可移动设备,选择PX的驱动提示,选择connect,安装不成功,遇到提示:the usb device iscurrtenly use。
问题解决:
原因:我的虚拟机VMware8不支持usb3.0,只能检测到usb2.0的端口,因此无法读取。解决办法:笔记本一般三个usb口,左边的带ss标号的为usb3.0,右边电源插口的一般标号的为usb2.0,将pix连接这个usb2.0的口。再在虚拟机下选择connect,正常连接。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)