Python
Java
PHP
IOS
Android
Nodejs
JavaScript
Html5
Windows
Ubuntu
Linux
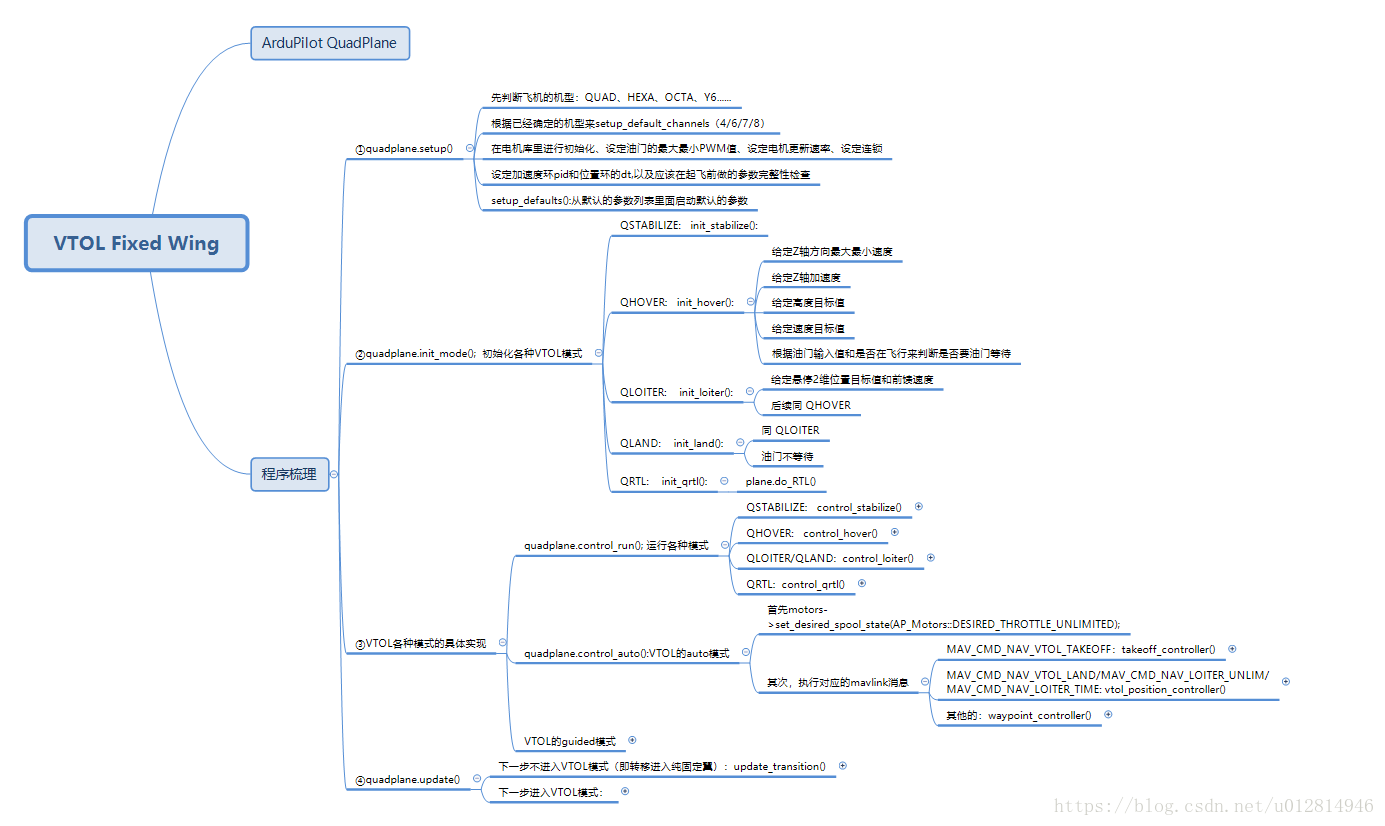
QuadPlane (VTOL)——ArduPilot——流程梳理
2023-05-16
版权声明:本文为博主原创博文,未经允许不得转载,若要转载,请说明出处并给出博文链接
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)
QuadPlane
VTOL
ArduPilot
流程梳理
QuadPlane (VTOL)——ArduPilot——流程梳理 的相关文章
ArduPilot飞控之Mission Planner模拟
ArduPilot飞控之Mission Planner模拟 1 源由2 Mission Planner安装 amp 模拟2 1 安装Mission Planner2 2 Mission Planner模拟 3 注意事项3 1 界面语言设置3
ArduPilot Kakute F7 AIO DIYF450 without GPS配置
ArduPilot Kakute F7 AIO DIYF450 without GPS配置 1 源由2 配置2 1 Kakute F7 AIO相关配置2 1 1 串口规划2 1 2 电传配置2 1 3 GPS配置2 1 4 CRSF接收机配
ArduPilot Kakute F7 AIO DIYF450 之GPS配置
ArduPilot Kakute F7 AIO DIYF450 之GPS配置 1 源由2 步骤2 1 模块预测试2 2 物理连接2 3 UART配置2 4 Compass使能2 5 GPS使能2 6 校准Compass 3 GPS amp
ArduPilot之开源代码框架
ArduPilot之开源代码框架 1 系统框架2 工程框架2 1 工程目录2 2 代码组成2 3 运行流程 4 硬件传感器总线4 1 I2C4 2 SPI4 3 UART4 4 CAN 5 软件设计概念6 总结7 参考资料 在研读ArduP
ArduPilot之开源代码Sensor Drivers设计
ArduPilot之开源代码Sensor Drivers设计 1 源由2 Sensor Drivers设计2 1 front end back end分层2 2 设计思想分析 3 实例理解3 1 驱动初始化3 2 业务应用代码3 3 fro
ArduPilot Tutorial(PDF版)及ArduPilot飞行模式介绍
ArduPilot官方Tutorial PDF 2017 2 http download csdn net download xiaoshuai537 10262086 ArduPilot中有14种常用的模式 xff1a 依赖GPS的模式有
ArduPilot之posHold&RTL实测
ArduPilot之posHold amp RTL实测 1 源由2 模式配置3 测试步骤4 飞行实测5 总结6 参考资料7 附录 关于QGC 暂不支持MAVLink2 signing Protocol问题7 1 问题描述7 2 硬件配置7
ardupilot EKF2速度位置融合算法
目录 文章目录 目录摘要1 更新滤波器2 使用GPS和测距仪更新EKF2的速度 xff0c 位置信息1 高度融合算法2 进行高度估计 摘要 本节主要记录自己看EKF2的速度位置融合算法 1 更新滤波器 span class token ke
ardupilot 最优化算法
目录 文章目录 目录 摘要 1 最小二乘法 1 1定义 1 2 基本思想 1 3 基本原理 1 4举例子 1 5最小二乘法和梯度法区别 2 梯度下降法 2 1 什么是梯度 2 2 什么是梯度下降 3 牛顿迭代法 3 0 牛顿迭代 3 1 牛
Ardupilot 飞控代码解锁流程分析
摘要 本文档只有记录分析ardupilot飞控代码解锁的过程 如果有分析不到的地方 欢迎批评指导 谢谢 联系方式 18129927205 重点标志变量 flags armed 0表示没有解锁 flags armed 1表示解锁 arming
Ardupilot飞控姿态角与姿态角速度控制过程分析(超长篇)
目录 文章目录 目录 摘要 1 自稳模式初始化 2 自稳模式更新函数 这个代码主要把横滚输入 俯仰输入量转换成目标角度需要的范围 也就是 4500 4500 3 姿态角速度代码控制过程分析 4 电机PWM控制运算 摘要 本节主要记录自己学习
最流行的开源飞控项目ArduPilot Mega(APM)介绍及发展历史
ArduPilotMega APM 是市面上最强大的基于惯性导航的开源自驾仪 特性包括 免费开源固件 xff0c 支持飞机 xff08 34 ArduPlane 34 xff09 xff0c 多旋翼 四旋翼 六旋翼 八旋翼等 直升机 xff
ardupilot之mavlink消息--飞控接收--单向
由于项目需要 xff0c 完成一个测试demo 本次从dronekit中发送mavlink消息给飞控 xff0c 飞控接收发来的wp信息 xff0c 然后进行修改供程序使用 首先祭出测试视频 dronekit arudpilot test
ardupilot在Linux上设置SITL(FlightGear)
本页介绍如何在Linux上设置SITL xff08 软件在环路中 xff09 特定命令在Ubuntu上从12 10到16 04进行了测试 概观 SITL模拟器允许您在没有任何硬件的情况下运行Plane xff0c Copter或Rover
ArduPilot日志系统探索(一)
先把官方网站上日志相关的说明翻译下来 xff1a ArduPilot Documentation ArduPilot documentation 页面 xff1a Logs Copter documentation 与日志记录和分析相关的主
ardupilot & px4 书写自己的app & drivers (二)
新建任务列表任务 打印时间 任务列表 const AP Scheduler span class hljs tag Task span Copter span class hljs tag scheduler tasks span span
APM 学习 6 --- ArduPilot 线程
ArduPilot 学习之路 6 xff0c 线程 英文原文地址 xff1a https ardupilot org dev docs learning ardupilot threading html 理解 ArduPilot 线程 线程
SITL Simulator —— ArduPilot —— Windows
版权声明 xff1a 本文为博主原创博文 xff0c 未经允许不得转载 xff0c 若要转载 xff0c 请说明出处并给出博文链接 参考网页 xff1a http ardupilot org dev docs sitl native on
配置Ardupilot环境4--------Ubuntu 安装eclipse
1 资源准备 这个的要求不是太清楚 xff0c 反正我是随便下的版本 xff0c 成功配置 下载JDK 选择dk 8u172 linux x64 tar gz 下载Eclipse 选择Eclipse IDE for Java Develop
25B无人直升机调试(Tuning)
要知道的直升机原理 首先要掌握的5个飞行模式 本文首先调试自稳模式 Stabilize 自稳模式 Alt Hold 定高模式 Loiter OF loiter 悬停模式 RTL Return to Launch 返航模式 Auto 自动模式
随机推荐
转载-自定义ros消息 vector
原创 xff1a https blog csdn net m zhangjingdong article details 79617966 1 我在ros程序包中新建一个msg文件夹 xff0c 用于存储msg消息相关定义 xff0c 之后
学神的“诞生”-2014清华大学本科生特等奖学金答辩观后感
清华的特奖与交大的竢实扬华 偶然间在学堂在线上留意到有这样的一场现场答辩 xff0c 很想知道最高学府的最高荣誉花落谁家 xff0c 得此殊荣的又是些怎样的 学神 xff0c 几点感受记录之 1 经历 gt gt 证书 清华的学生更注重大学
qt中 美化 问题列表
1 QTabWidget 中tab xff0c tab bar xff0c pane属性分布 2 使用qss美化时 xff0c tab标签上和pane中都能美化成功 xff0c 但tab最右侧的tab bar却始终没有成功 设置控件的背景
AttributeError: module 'cv2.cv2' has no attribute 'createLBPHFaceRecognizer'
AttributeError module cv2 cv2 has no attribute createLBPHFaceRecognizer 在某一次做人脸识别的小demo的过程中遇到了这个问题 下面直接上产生问题的源代码 span cl
CAN总线ACK响应问题
CAN总线的应答位 xff08 ACK xff09 用来表示节点已经收到有效的帧 任何节点如果准确无误地接收到帧 xff0c 则要向总线上发送显性位 xff0c 该显性位将掩盖发送节点输出的隐性位 xff0c 使总线上表现为显性 如果发送节
嵌入式书籍推荐
嵌入式书籍推荐 Linux基础 1 Linux与Unix Shell 编程指南 C语言基础 1 C Primer Plus xff0c 5th Edition 美 Stephen Prata着 2 The C Programming Lan
调试中关于__FILE__, __LINE__ 及 __FUNCTION__ 用法
在C语言中 FILE xff1a 打印相应的文件名 LINE xff1a 打印语句在源代码中相应的行 FUNCTION xff1a 打印语句在源代码中相应的函数名
看技术书籍坚持不下来的,看这里,记录增量学习法
今天 xff0c 在阅读 软技能 代码之外的生存指南 这本书的过程中 xff0c 学习到了番茄工作法 定额工作法 xff0c 受此启发 xff0c 突然脑海里冒出了一个方法论 xff0c 这是我独创的一个学习方法论 xff0c 我把它称作
ubuntu16.04安装realsense2环境与SDK(D435)
关于realsense2环境的安装以及SDK的使用现在的文档还不是很多 xff0c 就分享下我的过程 xff0c 希望对大家有帮助 我安装是从源码构建的 xff0c 以下是我参考的资料链接 第一个链接是官网 xff0c 我是以它为主 xff
C++服务器研发精进
一袭青衫闯帝都 xff0c 回首已然四春秋 壮志未酬心未老 xff0c 抚膺身衰发已疏 转眼间已经工作四年有余 xff0c 回想刚毕业的懵懂无知 xff0c 仿佛就在昨日 xff0c 成长乎 xff1f 徒增岁月矣 理想中的职业生涯应该是目
[kernel 启动流程] (第二章)第一阶段之——设置SVC、关闭中断
1 kernel启动流程第一阶段简单说明 arch arm kernel head S kernel入口地址对应stext ENTRY stext 1 第一阶段要做的事情 xff0c 也就是stext的实现内容 设置为SVC模式 xff0c
opencv 2.4.9编译踩坑笔记
为了跑GSLAM xff0c 一直遇到opencv版本的问题 xff0c 本机之前是4 1 0 xff0c 作者回答用的版本是opencv2 4 9 xff0c 没办法 xff0c 再装一个 最终我的CMAKE指令 xff1a cmake
如何使用APM固件飞控来使能外部位置控制
在三维激光雷达平台上我们飞控采用pixhawk2的飞控 官方给我说这个支持APM和PX4的固件 xff0c 但是对APM固件的支持性比较好 xff0c 因此就选用了APM的飞控 在一开始装好飞机后 xff0c 第一次飞还好好的 xff0c
CentOS 8中安装docker时报错的解决
CentOS 8中安装docker时报错的解决 Problem package podman span class token operator span 3 span class token punctuation span 2 span
四旋翼飞行器(QuadCopter--Parrot mini drone)—— 基于模型设计(Model Based Design)
版权声明 xff1a 本文为博主原创博文 xff0c 未经允许不得转载 xff0c 若要转载 xff0c 请说明出处并给出博文链接 最近一段时间 xff0c 朋友圈被MATLAB禁止哈工大 哈工程等科研院校使用刷屏了 xff0c 顿时各种声
VFH & VFH+ & VFH*—— Path Planning
版权声明 xff1a 本文为博主原创博文 xff0c 未经允许不得转载 xff0c 若要转载 xff0c 请说明出处并给出博文链接 最近在学习VFH算法 xff0c 感觉蛮神奇 xff0c 特意从维基百科扒来了资料 xff0c 供学习研究
VFH 2D —— Path Planning
版权声明 xff1a 本文为博主原创博文 xff0c 未经允许不得转载 xff0c 若要转载 xff0c 请说明出处并给出博文链接 进行路径规划的前提是 xff0c 无人机或机器人自身已经对当前环境有一个清晰的认知 xff08 环境感知 x
PX4——rcs源码分析
注 xff1a 本文转载自 博主 xff1a 虾米一代 博客 xff1a pixhawk原生码rcS分析 代码执行流程 1 编译时将cmake configs nuttx px4fmu v2 default cmake文件中配置的模块全部编
ArduPilot——AP_NavEKF3针对AP_NavEKF2做了哪些改进/变动?
版权声明 xff1a 本文为博主原创博文 xff0c 未经允许不得转载 xff0c 若要转载 xff0c 请说明出处并给出博文链接 本篇博文主要针对Paul Riseborough大神为ArduPilot做的导航EKF3算法 xff0c 相
QuadPlane (VTOL)——ArduPilot——流程梳理
版权声明 xff1a 本文为博主原创博文 xff0c 未经允许不得转载 xff0c 若要转载 xff0c 请说明出处并给出博文链接
热门标签
infinispan
fscalendar
ihp
quadprog
mesosphere
ngcontent
jscrollbar
gmpy
minidom
hornetq
watchos6
phylogeny
condaforge
sqlitejdbc
msvcr90dll
massmail