VIO概述
0.IMU与视觉进行比较
| IMU | 视觉 |
|---|
| 惯性测量单元 | 利用图像的VIO |
| 六自由度IMU,陀螺仪测量角加速度、加速度计测量加速度 | 利用图像通过特征、像素(直接法)进行位姿估计 |
| 高频>=100hz,应对载体位姿变化比较快的情况 | 以图像形式记录数据,频率在15hz-60hz,载体位姿不能变化太快,受外界环境影响 |
| 快速响应,不受成像质量影响,角速度普遍估计比较准确,可估计绝对尺度 | 不产生漂移、直接测量旋转与平移 |
| 存在零偏,低精度IMU积分位姿发散,高精度价格昂贵 | 受图像遮挡、运动物体干扰;单目视觉无法测量尺度;单目纯旋转运动无法估计;快速运动容易丢失 |
| 适合短时间、运动快时比较准 | 适合长时间、运动慢时估计准 |
利用视觉信息估计IMU的零偏,减少IMU由零偏导致的发散和累积误差;利用IMU为视觉提供快速运动时的定位。
IMU虽然可以测得角速度和加速度,但这些量都存在明显的漂移(Drift),使得积分两次得到的位姿数据非常不可靠。好比说,我们将IMU放在桌上不动,用它的读数积分得到的位姿也会漂出十万八千里。但是,对于短时间内的快速运动,IMU能够提供一些较好的估计。这正是相机的弱点。当运动过快时,(卷帘快门的)相机会出现运动模糊,或者两帧之间重叠区域太少以至于无法进行特征匹配,所以纯视觉SLAM非常害怕快速的运动。而有了IMU,即370第14讲SLAM:现在与未来使在相机数据无效的那段时间内,我们还能保持一个较好的位姿估计,这是纯视觉SLAM无法做到的。
相比于IMU,相机数据基本不会有漂移。如果相机放在原地固定不动,那么(在静态场景下)视觉SLAM的位姿估计也是固定不动的。所以,相机数据可以有效地估计并修正IMU读数中的漂移,使得在慢速运动后的位姿估计依然有效。
当图像发生变化时,本质上我们没法知道是相机自身发生了运动,还是外界条件发生了变化,所以纯视觉SLAM难以处理动态的障碍物。而IMU能够感受到自己的运动信息,从某种程度上减轻动态物体的影响。
总而言之,我们看到IMU为快速运动提供了较好的解决方式,而相机又能在慢速运动下解决IMU的漂移问题——在这个意义下,它们二者是互补的。
1.IMU与多种定位方案融合
- 自动驾驶中通常用 IMU+GPS/差分 GPS/RTK 的融合定位方案,形成 GNSS-INS 组合导航系统,达到厘米组定位精度。
- 头戴式 AR/VR 头盔则多使用视觉 +IMU 的 VIO 定位系统,形成高帧率定位方案。
2.融合方案
3.预备知识
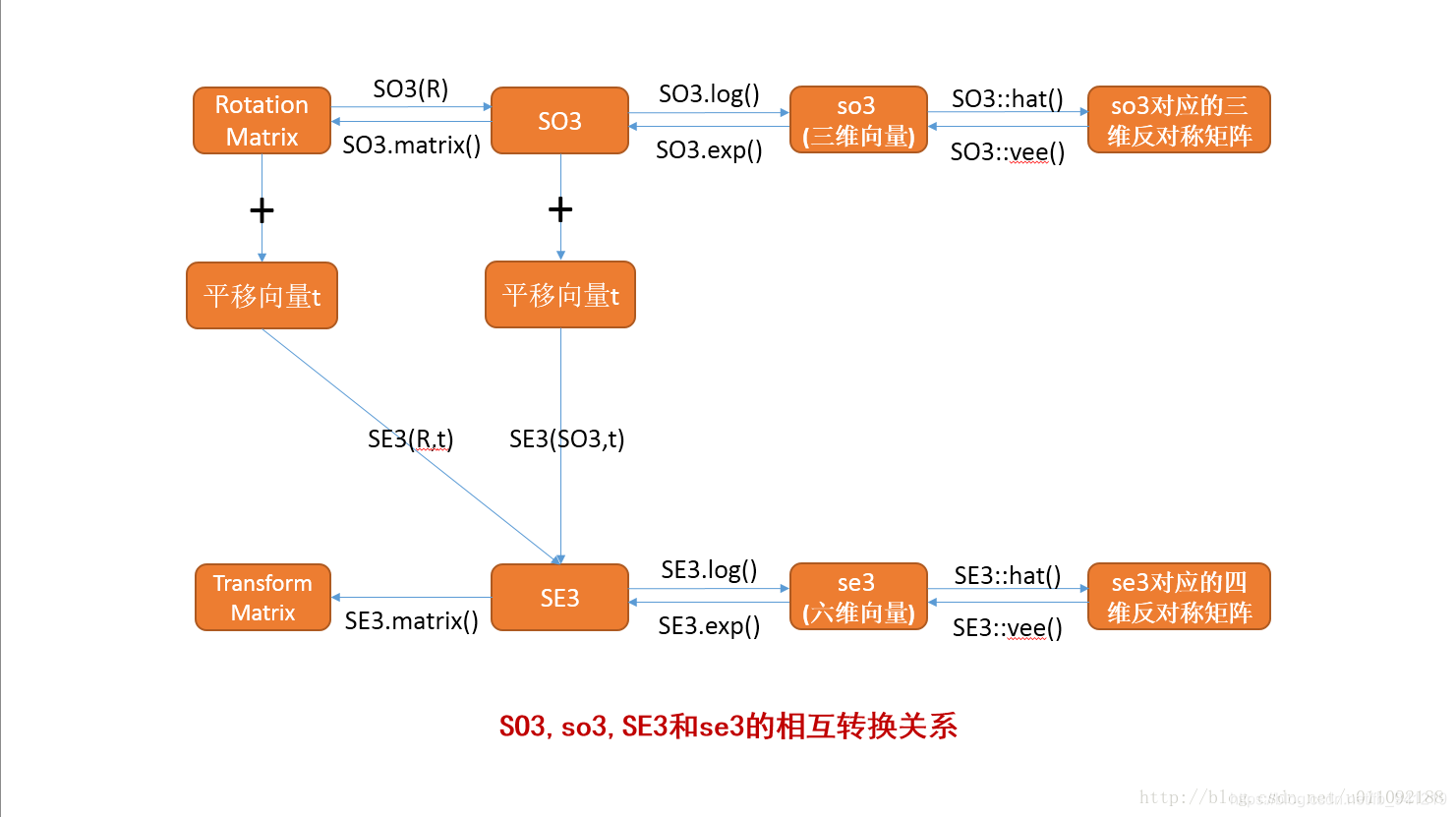
- 三维刚体运动

坐标系为from I to W

- 四元数

具体运算详见SLAM14讲
利用单位四元数可以表达三维空间内的旋转
从四元数为什么能表示三维旋转去理解它有的运算
模长为1的复数可以表示复平面内的纯旋转;四元数与复数类似,单位四元数(模长为1、取模操作)可以表示三维内的旋转。
四元数不唯一,相同的旋转可以由互为共轭(共轭操作)的四元数表示。
连续旋转,四元数相乘,单位四元数的乘积还是单位四元数。
旋转的逆,四元数的逆,单位四元数的逆和共轭是一样的。(求逆的时候简便操作)
叉积结果中含有叉乘项,所以四元数相乘不能交换位置。
- ** 用四元数表示旋转在程序代和数学表示有一些细微的差别。**
例如,通过运算符重载,四元数和三维向量可以直接计算乘法,但在数学上则需要先把向量转成虚四元数,再利用四元数乘法进行计算,同样的情况也适用于变换矩阵乘三维向量的情况。总体而言,程序中的用法会比数学公式更灵
活一些。
https://blog.csdn.net/shao918516/article/details/105305525
对于理解是:q1*q2得到实部不为0的普通四元数,这时没办法映射到三维超平面(总不能转着圈就转到了四维空间吧),结果与最初的点不在同一三维空间。为了解决这个问题,先对第四维(角度)旋转一半,再用逆或共轭旋转回来,这时正好将产生的第四维变为0,重新回到初始的三维超平面空间。

程序中使用
SO3的matrix形式和eigen下的旋转矩阵值相同,但是重载了opearator *运算
Sophus::SO3d R2_SO3=R1_so3*Sophus::SO3d::exp(w);
对旋转点和旋转矩阵求雅可比的注意点(都是对向量求雅可比,所以对连续旋转矩阵求雅可比时要先转换成向量,再对某一旋转矩阵乘上小量)
Q: PPTp31页,左右交换取矩阵,符号相反
4.习题解答
https://blog.csdn.net/hitljy/article/details/107320682?utm_medium=distribute.pc_relevant.none-task-blog-BlogCommendFromMachineLearnPai2-3.control&dist_request_id=09cd2f58-ed1c-455b-b651-62cdc347e517&depth_1-utm_source=distribute.pc_relevant.none-task-blog-BlogCommendFromMachineLearnPai2-3.control
1.2 有哪些常见的视觉 +IMU 融合方案?有没有工业界应用的例子?
VINS (单目+IMU、双目+IMU)
OKVIS (单目+IMU、双目+IMU)
ROVIO (单目+IMU)
RKSLAM (单目+IMU)
ORB_SLAM-IMU(单目+IMU)
AR/VR,自动驾驶,无人机,手机、无人机拍照防抖
重点关注李群的性质,看清是关于旋转点的雅可比还是连续旋转矩阵的雅克比
每一微小干扰都是作用在R上的,R(-1)p----->(Rexp(w))(-1)*p


5.我的补充理解等等
旋转向量θu,u是旋转轴向量,θ是向量的长度,也就是旋转的角度
旋转向量和旋转矩阵的变换公式、罗德里格斯公式等
https://blog.csdn.net/shao918516/article/details/105109278
该链接解释的非常详细清楚
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)