安装realsense-sdk和realsense的ros包
【1】https://blog.csdn.net/qq_42800654/article/details/109393646
【2】https://github.com/IntelRealSense/librealsense/blob/master/doc/distribution_linux.md#installing-the-packages
【3】https://github.com/IntelRealSense/realsense-ros
安装librealsense SDK 2.0
参照博客【1】第二部分 或 librealsense官方教程【2】
安装realsense-ros包
参照博客【1】第三部分 或 realsense-ros官方教程【3】
D435和T265支架3D模型

模型文件:https://github.com/IntelRealSense/librealsense/blob/development/examples/tracking-and-depth/bracket_t265nd435_external.stl
参考:https://github.com/amov-lab/Prometheus/wiki/D435i-T265%E5%BB%BA%E5%9B%BE
启动相机
找到rs_d400_and_t265.launch文件,将其tf节点更改为
<node pkg="tf" type="static_transform_publisher" name="t265_to_d400" args="-0.009375589 0.01590727 0.028273059 0 0 0 /$(arg tf_prefix_camera1)_link /$(arg tf_prefix_camera2)_link 100"/>
启动
cd catkin_ws
roslaunch realsense2_camera rs_d400_and_t265.launch
Rviz报错
报错: For frame [camera_depth_optical_frame]: Fixed Frame [map] does not exist
报错原因:
看 Global Options 当中的 Fixed Frame ,是 map。这是因为世界坐标定义成map,单独运行realsense节点不会生成世界坐标,而添加的点云话题找不到世界坐标,就定位不了自身的位置,从而报错。
解决方法:
1.把global fixed frame设成topic自己所在的坐标系
将 Global Options — Fixed Frame — map 改为 camera_color_frame
2.用tf包工具发布global fixed frame到topic所在坐标系的tf关系
rosrun tf static_transform_publisher 0.0 0.0 0.0 0.0 0.0 0.0 map xxx 100 ;//将xxx映射为map
参考:https://blog.csdn.net/xu_fengyu/article/details/86562827
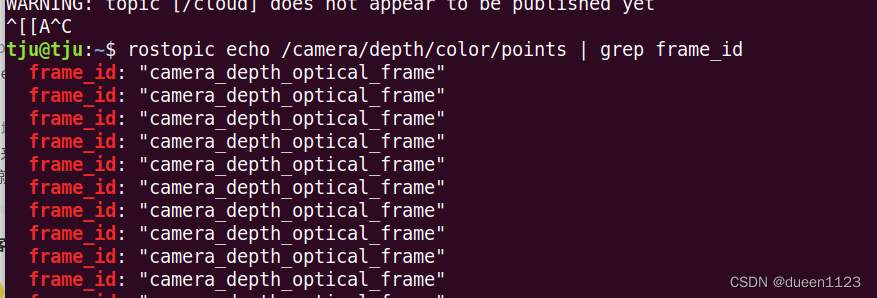
查看该话题的frame_id
rostopic echo /camera/depth/color/points | grep frame_id
seq 是消息的顺序标识
stamp 是消息中与数据相关联的时间戳
frame_id 对应消息数据的参考系
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)