文章目录
- 前言
- 一、参数对比
- 二、环境配置
- 三 、实际使用效果
-
- 总结
前言
为了开展视觉slam相关项目,最近找了几款不同的深度相机进行测试,本次主要讲一下奥比中光的Gemini Pro相机与Intel的D435i的使用对比。先po上实物图:

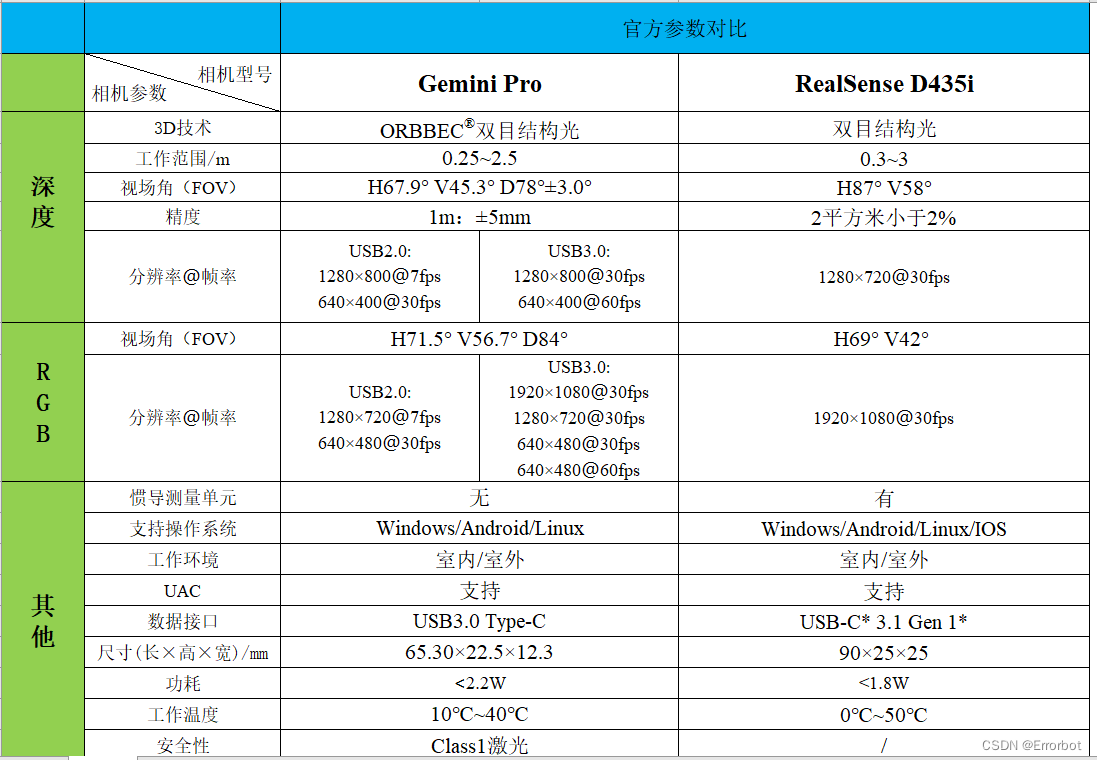
一、参数对比
这两款相机外形上都很小巧,且容易安装。Gemini Pro与D435i都是双目结构光,在深度相机方面,在相同分辨率下Gemini Pro具有更短的操作距离(0.25m);在RGB方面,Gemini Pro有更宽的视场角,这意味着相机读到的范围能更大,看到的越多信息量越大嘛;两个相机均支持在室外工作。
二、环境配置
我主要在Linux中用到这两款相机,然而在用D435i (或者说RealSense系列的相机) 的时候,都让我体会到了万事开头难的感觉,适配环境真的好麻烦,很多时候github的仓库拉不下来,限制有点大;买Gemini Pro的时候商家直接给了我一个SDK,小白式安装运行,好感+1。
三 、实际使用效果
相对于参数来说,实际使用的效果的对比更为直观。这里以图像读取与视觉slam效果这两部分给大家展示。
图像读取
手机拍摄:手机拍摄的图片很自然,亮度比较均匀,有可能是因为手机会自然处理光影。

相机读取:
Gemini Pro和D435i读到的图片对比:两个相机拍出来的图片都存在亮度不均匀的问题,Gemini Pro对物体的颜色还原得更好物体更清晰,D435i的图像偏暖色调,有一种雾面感;由参数得知,Gemini Pro视场角更大,但随之而来突显了图像畸变的问题,而D435i虽然也有图像畸变,由于视场角不大所以畸变不是很明显。

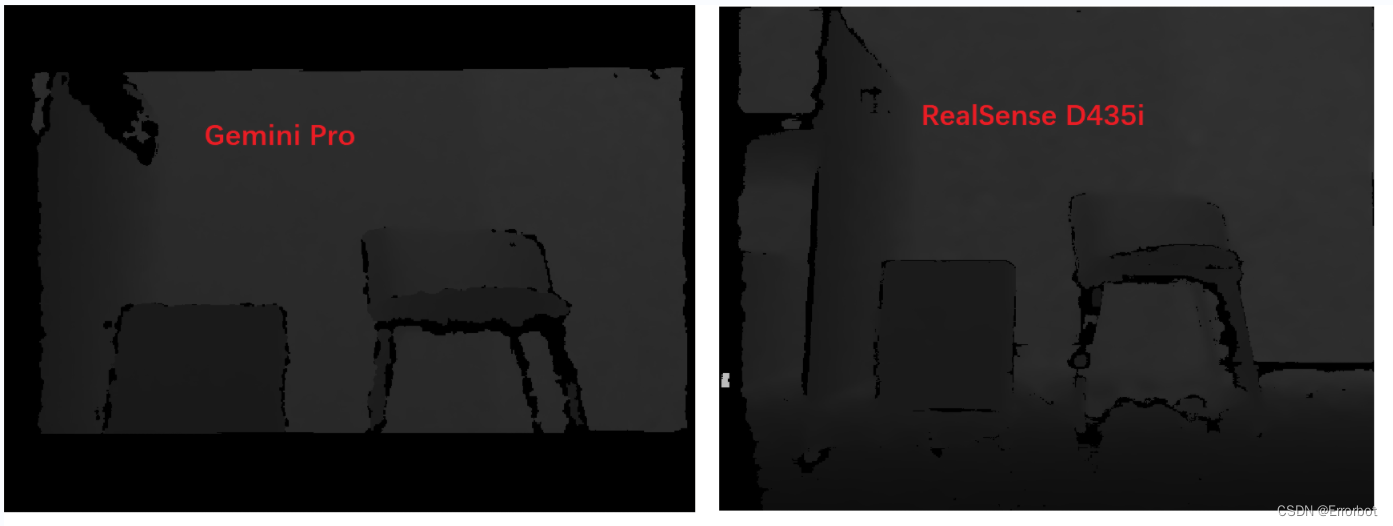
Depth图像读取:
对比可以看到虽然D435i的深度相机视场角比Gemini Pro的视场角大,图像细腻,但Gemini Pro读到的桌腿形状更明显一些,如果只需要读取相机中间的物体的话,Gemini Pro也完全够用。
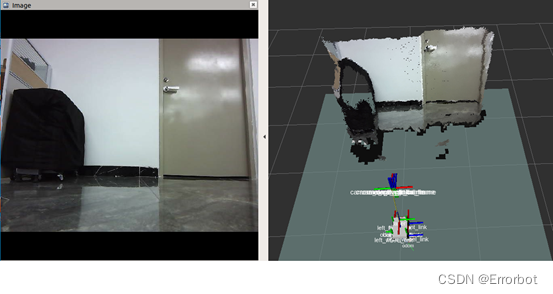
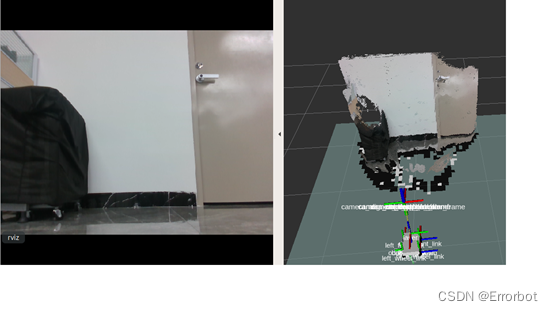
视觉slam效果对比
将两款相机接入Linux中跑视觉slam,RGB图与Depth图结合使用,主要用RTAB-MAP算法测试效果。结果如下:
虽然Gemini Pro深度相机的FOV不及RealSense D435i,但总体来说在视觉slam的实际应用中,Gemini Pro实现效果比RealSense D435i要更好一点。
Gemini Pro:
RealSense D435i:
总结
- RGB对比
Gemini Pro视场角更大、颜色还原得更好,但会出现图像畸变;而D435i读到的图像虽然不够清晰但图像畸变很小。 - 深度对比
D435i的深度相机视场角比Gemini Pro的大,且图像更细腻,但Gemini Pro读到的细小物体形状更明显一些。 - 融合使用对比
在实际使用中二者效果相差不大。 - 价格对比
两个相机外型差不多,Gemini Pro目前的价位在950左右,而D435i价位大家都知道,我买的时候是2700rmb~
总体来说Gemini Pro这一款相机性价比在同价系列中属于是比较高的了,它已经成为我心目中的D435i平替了。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)