px4版本1.12稳定版
最近在做px4二次开发相关工作,按照网上的一些教程自定义了一个mavlink消息用来控制无人机.
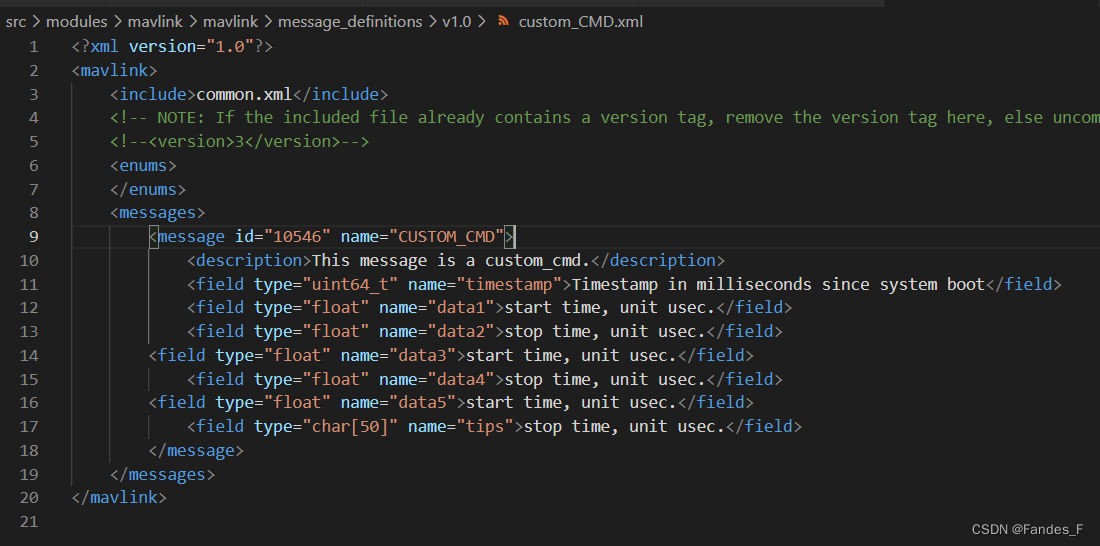
按照教程里面的单独开了一个xml来定义消息
最后生成的消息在px4端通过流传输的方式自己写的客户端可以收到消息,但是客户端发送这个消息到px4飞控上面死活收不到!!
经过(一天)的排查,发现是CRC校验的问题(具体看这个).通过vscode搜索可以看到build出来的目录中的mavlink库的MAVLINK_MESSAGE_CRCS宏定义没有包含我们自己定义的id值,当然到这一步就已经可以解决问题了,就是直接在build后的文件中加上自己消息的crc校验的数组(具体值可以看上面的参考文献)

但是这样每次编译都要重新填上去,好不方便.
于是根据编译时的消息知道这个MAVLINK_MESSAGE_CRCS是build的时候生成的
在vscode中搜索这个打印出来的消息可以找到它是调用了PX4-Autopilot/src/modules/mavlink/mavlink/pymavlink/generator/mavgen.py
于是想到直接将自己的消息放入PX4-Autopilot/src/modules/mavlink/mavlink/message_definitions/v1.0/common.xml中就可以直接编译出来,果然,放进去之后就自动生成自定义消息的crc字段了.问题解决!
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)