设计背景:
针对大部分国产低端MCU(ARM-CortexM0)来说,并没有空闲中断,此时就需要一个定时器Timer配合来完成此任务。对于UART接受不定长数据,空闲中断还是非常实用的!
知识点:FreeRTOS的二值信号量 Timer UART
空闲中断的原理: IDLE中断叫空闲中断,不叫帧中断。那么什么叫空闲,怎么定义空闲呢?在实际发送数据的时候,比如一串字符串,其实发送的两个字符之间间隔非常短,所以在两个字符之间不叫空闲。空闲的定义是总线上在一个字节的时间内没有再接收到数据,空闲中断是检测到有数据被接收后,总线上在一个字节的时间内没有再接收到数据的时候发生的。而总线在什么情况时,会有一个字节时间内没有接收到数据呢?一般就只有一个数据帧发送完成的情况,所以串口的空闲中断也叫帧中断。
开发环境:Win10, MDK5.28, HC32L136
设计步骤:
这里不做长篇大论,列举了重要的核心部分讲解,便于大家移植。附件中带有完整的工程代码。
首先定义一个结构体和信号量。
extern SemaphoreHandle_t AT_RX_Semaphore;
/*用于空闲中断判断*/
typedef struct
{
uint16_t uart_cnt;
uint16_t timer_cnt;
}stcUART_Idle;
extern stcUART_Idle UART_Idle;
2. 串口部分代码:
/**********************************************************************************************
*函数功能:初始化UART
*UARTx: 选择初始化UART端口号
*Parity: 奇偶校验位
*说明IO用使用复位模式2,DMA默认是使能
**********************************************************************************************
*/
void BSP_UARTx_Init(M0P_UART_TypeDef *UARTx, uint32_t baud, en_uart_mmdorck_t Parity)
{
if(UARTx == M0P_UART0)
{
Uart0_init(baud,Parity);
EnableNvic(UART0_IRQn, IrqLevel3, TRUE); ///<系统中断使能
}
if(UARTx == M0P_UART1)
{
EnableNvic(UART1_IRQn, IrqLevel3, TRUE); ///<系统中断使能
}
}
//串口0模块配置
static void Uart0_init(uint32_t baud, en_uart_mmdorck_t Parity)
{
stc_gpio_cfg_t stcGpioCfg;
stc_uart_cfg_t stcCfg;
stc_uart_baud_t stcBaud;
DDL_ZERO_STRUCT(stcGpioCfg);
DDL_ZERO_STRUCT(stcCfg);
DDL_ZERO_STRUCT(stcBaud);
Sysctrl_SetPeripheralGate(SysctrlPeripheralGpio,TRUE); //GPIO外设模块时钟使能
stcGpioCfg.enDir = GpioDirOut;
Gpio_Init(GpioPortA,GpioPin9,&stcGpioCfg);
Gpio_SetAfMode(GpioPortA,GpioPin9,GpioAf1); //配置PA09 为UART0 TX
stcGpioCfg.enDir = GpioDirIn;
Gpio_Init(GpioPortA,GpioPin10,&stcGpioCfg);
Gpio_SetAfMode(GpioPortA,GpioPin10,GpioAf1);//配置PA10 为UART0 RX
Sysctrl_SetPeripheralGate(SysctrlPeripheralUart0,TRUE);//UART0外设模块时钟使能
stcCfg.enRunMode = UartMskMode3; //模式3
if(Parity == UartMskEven)
{
stcCfg.enMmdorCk = UartMskEven; //偶校验
}
else if(Parity == UartMskOdd)
{
stcCfg.enMmdorCk = UartMskOdd; //奇校验
}
else
{
stcCfg.enRunMode = UartMskMode1; //模式1,奇偶检验无效
}
stcCfg.enStopBit = UartMsk1bit; //1位停止位
stcCfg.stcBaud.u32Baud = baud; //波特率9600
stcCfg.stcBaud.enClkDiv = UartMsk8Or16Div; //通道采样分频配置
stcCfg.stcBaud.u32Pclk = Sysctrl_GetPClkFreq(); //获得外设时钟(PCLK)频率值
Uart_Init(M0P_UART0, &stcCfg); //串口初始化
Uart_ClrStatus(M0P_UART0,UartRC); //清接收请求
Uart_ClrStatus(M0P_UART0,UartTC); //清发送请求
Uart_EnableIrq(M0P_UART0,UartRxIrq); //使能串口接收中断
//Uart_EnableIrq(M0P_UART0,UartTxIrq); //使能串口发送中断
//使能DMA发送, DMA相关通道使能后,如果Tx Buff为空,会立马启动传输
Uart_EnableFunc(M0P_UART0,UartDmaTxFunc);
}
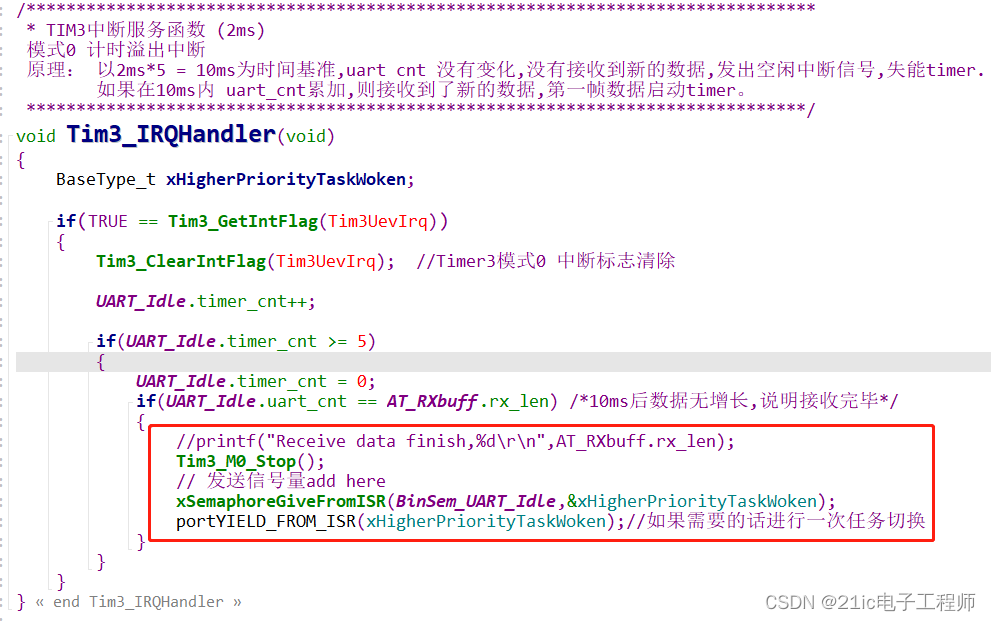
3. 编写UART中断函数
[attach]1640980[/attach]
在这里采用了循环数组接收,没有使用队列,可以省点资源,效果差不多,数组处理更方便。
3. Timer定时器,这里选用2ms周期中断,并通过UART中断中启动,在Timer中断中关闭。
#include "bsp_timer.h"
#include "bsp_uart.h"
SemaphoreHandle_t BinSem_UART_Idle;
//Timer3 配置,用于uart0 的空闲中断
void BSP_Timer3_init(uint16_t u16Period)
{
uint16_t u16ArrValue;
uint16_t u16CntValue;
stc_tim3_mode0_cfg_t stcTim3BaseCfg;
//结构体初始化清零
DDL_ZERO_STRUCT(stcTim3BaseCfg);
Sysctrl_SetPeripheralGate(SysctrlPeripheralTim3, TRUE); //Base Timer外设时钟使能
stcTim3BaseCfg.enWorkMode = Tim3WorkMode0; //定时器模式
stcTim3BaseCfg.enCT = Tim3Timer; //定时器功能,计数时钟为内部PCLK
stcTim3BaseCfg.enPRS = Tim3PCLKDiv32; //PCLK/32
stcTim3BaseCfg.enCntMode = Tim316bitArrMode; //自动重载16位计数器/定时器
stcTim3BaseCfg.bEnTog = FALSE;
stcTim3BaseCfg.bEnGate = FALSE;
stcTim3BaseCfg.enGateP = Tim3GatePositive;
Tim3_Mode0_Init(&stcTim3BaseCfg); //TIM3 的模式0功能初始化
u16ArrValue = 0x10000 - u16Period ;
Tim3_M0_ARRSet(u16ArrValue); //设置重载值(ARR = 0x10000 - 周期)
u16CntValue = 0x10000 - u16Period;
Tim3_M0_Cnt16Set(u16CntValue); //设置计数初值
Tim3_ClearIntFlag(Tim3UevIrq); //清中断标志
Tim3_Mode0_EnableIrq(); //使能TIM3中断(模式0时只有一个中断)
EnableNvic(TIM3_IRQn, IrqLevel3, TRUE); //TIM3 开中断
//Tim3_M0_Run(); //TIM3 运行
}
/*去初始化,进低功耗功耗前调用此接口*/
void BSP_Timer3_Deinit(void)
{
stc_tim3_mode0_cfg_t stcTim3BaseCfg;
DDL_ZERO_STRUCT(stcTim3BaseCfg); //结构体初始化清零
Tim3_Mode0_Init(&stcTim3BaseCfg);
Tim3_ClearIntFlag(Tim3UevIrq); //清中断标志
Tim3_Mode0_DisableIrq();
Tim3_M0_Stop();
}
UART和Timer如何配合使用,上面的函数已经给出了。
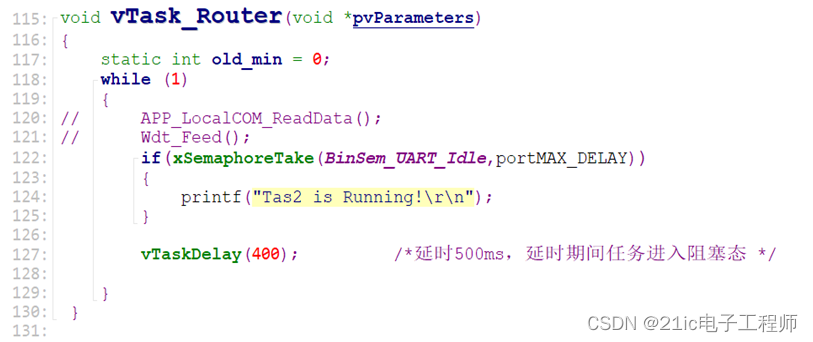
最后,中断中已经给出了信号量,后续如何处理呢?
用一个任务去接收信号就好了:
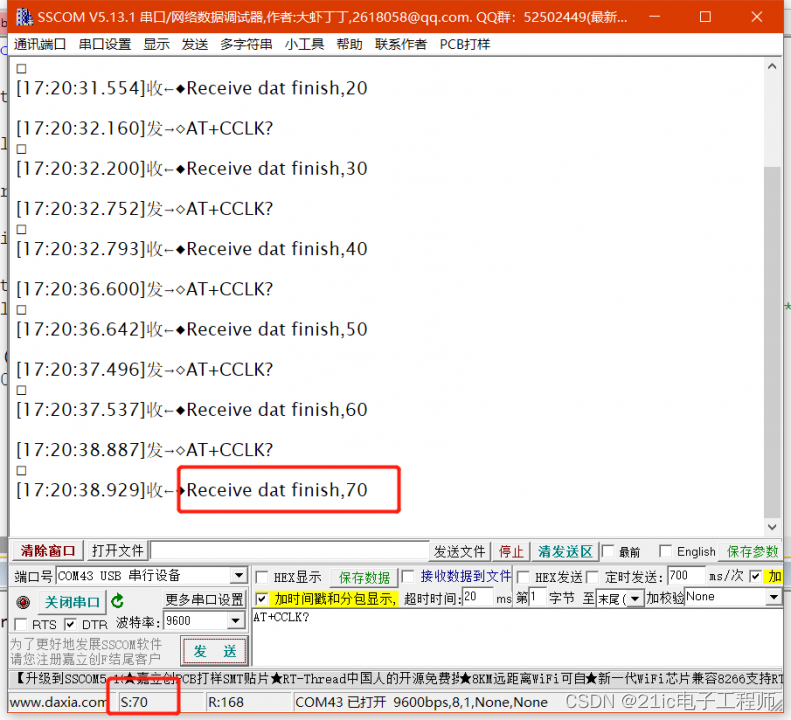
实验效果:
---------------------
作者:caizhiwei
链接:https://bbs.21ic.com/icview-3113174-1-1.html
来源:21ic.com
此文章已获得原创/原创奖标签,著作权归21ic所有,任何人未经允许禁止转载。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)