一、前言
最近在结合ORB_SLAM2和Map2DFusion,来做无人机航拍视频建图,基本完成了pipeline,但发现出来的效果没有Map2DFusion官方的效果好。


(第一张图是我自己处理的效果,在一些地方可以看到明显断层;第二张图是官方的效果)
我有一个想法,能不能通过提高ORB_SLAM2关键帧的个数来改善建图?
于是我开始调研如何增加ORB_SLAM2关键帧的个数。
二、调研
ORB_SLAM2的Tracking线程的NeedNewKeyFrame()函数中会经过四个条件判断,来决定是否添加关键帧:
const bool c1a = mCurrentFrame.mnId>=mnLastKeyFrameId+mMaxFrames;
const bool c1b = (mCurrentFrame.mnId>=mnLastKeyFrameId+mMinFrames && bLocalMappingIdle);
const bool c1c = mSensor!=System::MONOCULAR && (mnMatchesInliers<nRefMatches*0.25 || bNeedToInsertClose) ;
const bool c2 = ((mnMatchesInliers<nRefMatches*thRefRatio|| bNeedToInsertClose) && mnMatchesInliers>15);
if((c1a||c1b||c1c)&&c2)
{
...增加关键帧...
}
我用一个单目的视频(25fps)来测试,发现一个规律:
- c1a的值一直为0
- c1b的值0多1少(由于mMinFrames=0,c1b本质上取决于bLocalMappingIdle。即LocalMapping线程空闲的时候,c1b = 1)
- c1c的值一直为0(因为单目系统,这个值被置为0)
- c2的值1多0少。(c2的判断条件是:(当前帧的跟踪点数 < 90%的参考关键帧跟踪点数 ) 而且 ( 当前帧跟踪点数 > 15 ) )
我试过调整这些条件,尝试增加关键帧个数。但实际上没法做到稳定增加关键帧个数。
之后,我发现再LocalMapping线程中,有一个去除冗余关键帧的函数:KeyFrameCulling(),正是这个函数阻止了增加过多的关键帧。
KeyFrameCulling()会将那些有90%的点能够被超过三个关键帧观察到的帧认为是冗余帧,并去除。
三、实际操作
1. 在NeedNewKeyFrame(),把
if((c1a||c1b||c1c)&&c2)
改为
if(c1a)
因为mMaxFrames的数值是fps的缘故,c1a的判断相当于每1s产生一个关键帧
2. 注释掉LocalMapping线程中的KeyFrameCulling()函数,即不用剔除冗余关键帧。
四、效果
经过这两点操作后,ORB_SLAM2产生的关键帧数量大大增加,从原来的355个增加到698个(使用同一个视频做测试)。
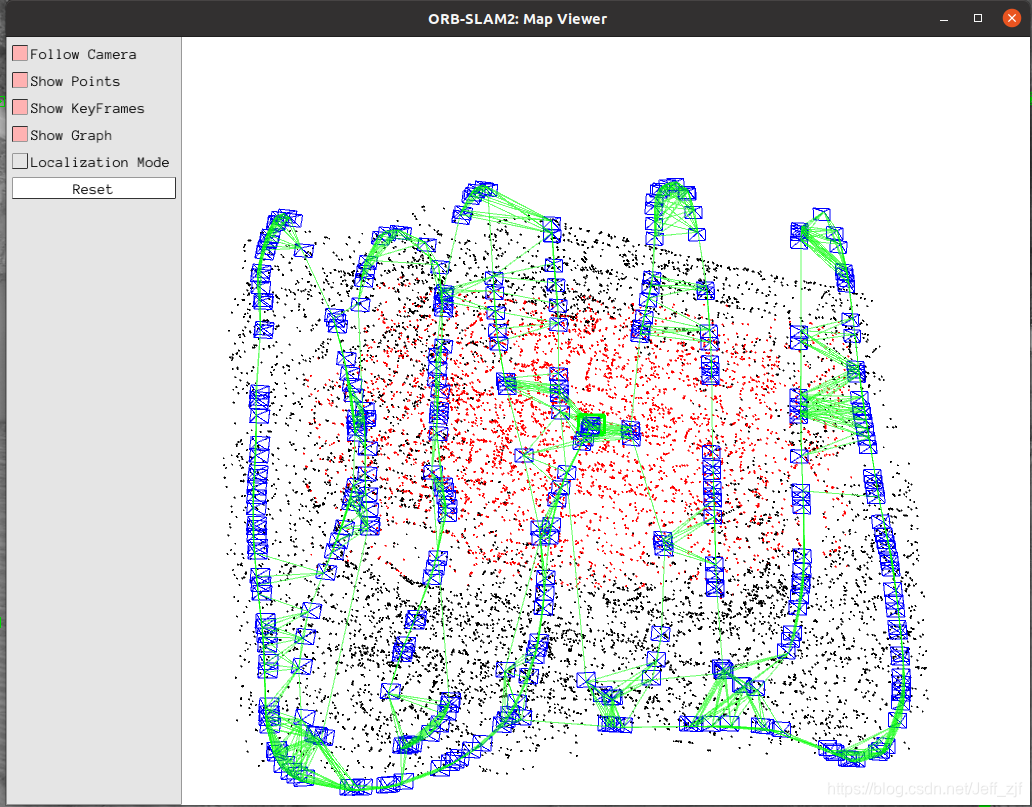
如下图所示,第一张是原本ORB_SLAM2产生的关键帧效果(一个蓝色的框代表一个关键帧),第二张是更改过代码后产生的关键帧效果,可以看到关键帧变了密集了不少。

五、后续
虽然增加了关键帧个数,可还是没办法提高Map2DFusion的建图效果,只能另找其他突破口了......
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)